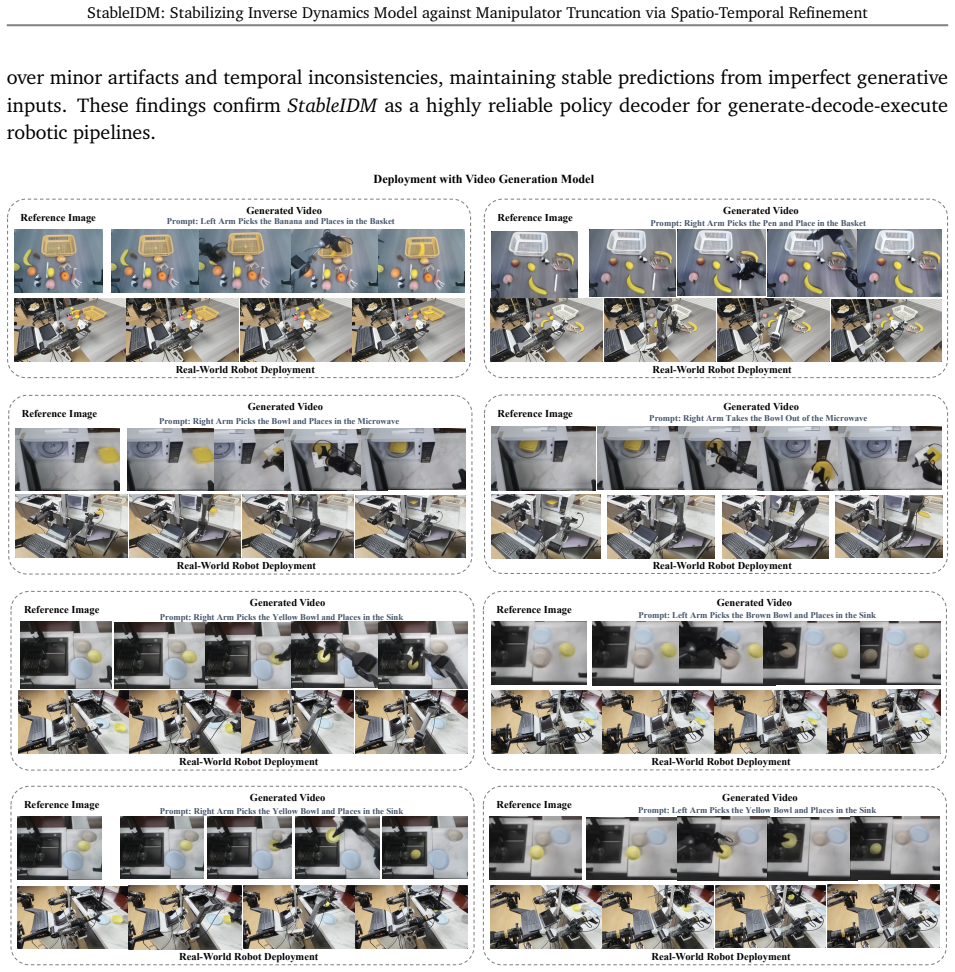
Recognition: unknown
StableIDM: Stabilizing Inverse Dynamics Model against Manipulator Truncation via Spatio-Temporal Refinement
Pith reviewed 2026-05-10 04:38 UTC · model grok-4.3
The pith
StableIDM stabilizes inverse dynamics models against manipulator truncation by refining visual features with masking, directional aggregation, and temporal smoothing.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The author claims that combining auxiliary robot-centric masking to suppress irrelevant scene content, directional feature aggregation that extracts anisotropic features along directions derived from the visible arm, and temporal dynamics refinement that smooths and corrects outputs through motion continuity produces stable action predictions from partially observed visual inputs.
What carries the argument
The central mechanism is the StableIDM spatio-temporal refinement pipeline built from robot-centric masking, directional feature aggregation for geometry-aware spatial reasoning, and temporal dynamics refinement for continuity-based correction.
If this is right
- Action predictions remain reliable even when only part of the manipulator is visible in the camera frame.
- Task success rates rise in real-robot settings that replay demonstrations or decode plans from generated video.
- Vision-language-action models trained with data labeled by the refined model achieve higher success on physical hardware.
- End-to-end grasp performance improves when video-based plans are converted to actions through the stabilized model.
Where Pith is reading between the lines
- The same masking-plus-directional-plus-temporal pattern could be tested on other partial-observability problems such as heavy object occlusion or multi-robot scenes.
- The approach might scale to produce larger, more consistent datasets for training generalist robot policies without manual intervention.
- Similar refinements could be inserted into forward dynamics or world models that also suffer from incomplete visual state.
Load-bearing premise
The performance gains arise primarily from the three refinement components rather than from differences in training details, data selection, or baseline implementations.
What would settle it
An experiment that measures action accuracy on images containing truncated robot arms, first with the full refinement pipeline and then with each component removed one at a time; if accuracy does not drop when the components are ablated, the central claim is falsified.
Figures



read the original abstract
Inverse Dynamics Models (IDMs) map visual observations to low-level action commands, serving as central components for data labeling and policy execution in embodied AI. However, their performance degrades severely under manipulator truncation, a common failure mode that makes state recovery ill-posed and leads to unstable control. We present StableIDM, a spatio-temporal framework that refines features from visual inputs to stabilize action predictions under such partial observability. StableIDM integrates three complementary components: (1) auxiliary robot-centric masking to suppress background clutter, (2) Directional Feature Aggregation (DFA) for geometry-aware spatial reasoning, which extracts anisotropic features along directions inferred from the visible arm and (3) Temporal Dynamics Refinement (TDR) to smooth and correct predictions via motion continuity. Extensive evaluations validate our approach: StableIDM improves strict action accuracy by 12.1% under severe truncation on the AgiBot benchmark, and increases average task success by 9.7% in real-robot replay. Moreover, it boosts end-to-end grasp success by 11.5% when decoding video-generated plans, and improves downstream VLA real-robot success by 17.6% when functioning as an automatic annotator. These results demonstrate that StableIDM provides a robust and scalable backbone for both policy execution and data generation in embodied artificial intelligence.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces StableIDM, a spatio-temporal framework to stabilize inverse dynamics models (IDMs) under manipulator truncation in robotic systems. It integrates three components—robot-centric masking to reduce background clutter, Directional Feature Aggregation (DFA) for anisotropic geometry-aware feature extraction from visible arm directions, and Temporal Dynamics Refinement (TDR) for motion-continuity-based prediction smoothing—and reports empirical gains: +12.1% strict action accuracy on AgiBot under severe truncation, +9.7% average task success in real-robot replay, +11.5% end-to-end grasp success from video plans, and +17.6% downstream VLA success when used as an annotator.
Significance. If the gains prove robustly attributable to the three modules rather than implementation or training differences, StableIDM would offer a practical, scalable backbone for both low-level policy execution and automatic data labeling in embodied AI, directly addressing a frequent partial-observability failure mode in manipulation.
major comments (2)
- [Experiments] Experiments section (and associated tables/figures): the manuscript reports the 12.1% accuracy and 9.7–17.6% success lifts but provides no ablation variants that remove robot-centric masking, DFA, or TDR individually while keeping training schedule, data splits, and optimizer identical to the full model. Without these controlled comparisons, attribution of the gains specifically to the spatio-temporal refinement components remains insecure.
- [§3] §3 (Method): the precise algorithmic definitions of DFA (how directions are inferred from the visible arm and how anisotropy is enforced) and TDR (exact form of the motion-continuity loss or smoothing operator) are described at a high level only; the absence of pseudocode, hyper-parameter tables, or explicit equations prevents independent reproduction and verification that the modules are load-bearing.
minor comments (2)
- [§4] Figure captions and §4: several real-robot success metrics are reported as averages without stating the number of trials, variance, or statistical tests; adding these details would strengthen interpretability.
- [§3.2] Notation in §3.2: the symbol for the direction-inference function in DFA is introduced without an explicit equation reference, making the geometry-aware aggregation step harder to follow on first reading.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and have incorporated revisions to strengthen the experimental validation and methodological clarity.
read point-by-point responses
-
Referee: [Experiments] Experiments section (and associated tables/figures): the manuscript reports the 12.1% accuracy and 9.7–17.6% success lifts but provides no ablation variants that remove robot-centric masking, DFA, or TDR individually while keeping training schedule, data splits, and optimizer identical to the full model. Without these controlled comparisons, attribution of the gains specifically to the spatio-temporal refinement components remains insecure.
Authors: We agree that controlled ablations with identical training configurations are essential for secure attribution. In the revised manuscript we have added a dedicated ablation study (new Table 3) that removes each component individually—robot-centric masking, DFA, and TDR—while freezing the data splits, optimizer, learning rate schedule, and all other hyperparameters to match the full StableIDM training run. The results show consistent performance drops (e.g., –3.8 % strict accuracy without DFA, –2.9 % without TDR), confirming that each module contributes measurably to the reported gains under truncation. We believe these additions directly resolve the concern. revision: yes
-
Referee: [§3] §3 (Method): the precise algorithmic definitions of DFA (how directions are inferred from the visible arm and how anisotropy is enforced) and TDR (exact form of the motion-continuity loss or smoothing operator) are described at a high level only; the absence of pseudocode, hyper-parameter tables, or explicit equations prevents independent reproduction and verification that the modules are load-bearing.
Authors: We acknowledge that the original Section 3 provided only high-level descriptions. The revised manuscript now includes explicit algorithmic details: DFA direction inference is performed via 2D keypoint detection on the visible arm segments followed by oriented feature aggregation with anisotropic kernels; TDR is formalized as a motion-continuity loss L_TDR = Σ_t ||â_t – â_{t-1}||_2^2 plus a temporal smoothing operator. We have added pseudocode for both modules in Appendix A and a complete hyper-parameter table (new Table 2) listing all values used in the experiments. These changes enable independent reproduction and verification. revision: yes
Circularity Check
No significant circularity; empirical method with no derivation chain
full rationale
The paper introduces StableIDM as an empirical spatio-temporal framework with three components (robot-centric masking, DFA, TDR) for improving IDM under truncation. All reported gains (12.1% action accuracy, 9.7–17.6% success rates) are presented as experimental outcomes on AgiBot benchmark and real-robot tasks, without any equations, derivations, fitted parameters renamed as predictions, or self-citations invoked to establish uniqueness or ansatzes. No load-bearing step reduces to its own inputs by construction, and the central claims rest on comparative evaluations rather than self-referential logic. This is the expected outcome for a purely empirical robotics paper.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Cosmos World Foundation Model Platform for Physical AI
Niket Agarwal, Arslan Ali, Maciej Bala, Yogesh Balaji, Erik Barker, Tiffany Cai, Prithvijit Chattopadhyay, Yongxin Chen, Yin Cui, Yifan Ding, et al. Cosmos world foundation model platform for physical ai.arXiv preprint arXiv:2501.03575, 2025. 3
work page internal anchor Pith review arXiv 2025
-
[2]
Alisson Azzolini, Junjie Bai, Hannah Brandon, Jiaxin Cao, Prithvijit Chattopadhyay, Huayu Chen, Jinju Chu, Yin Cui, Jenna Diamond, Yifan Ding, et al. Cosmos-reason1: From physical common sense to embodied reasoning.arXiv preprint arXiv:2503.15558, 2025. 3
-
[3]
Fan Bao, Chendong Xiang, Gang Yue, Guande He, Hongzhou Zhu, Kaiwen Zheng, Min Zhao, Shilong Liu, Yaole Wang, and Jun Zhu. Vidu: a highly consistent, dynamic and skilled text-to-video generator with diffusion models.arXiv preprint arXiv:2405.04233, 2024. 3
-
[4]
arXiv preprint arXiv:2409.16283 (2024)
Homanga Bharadhwaj, Debidatta Dwibedi, Abhinav Gupta, Shubham Tulsiani, Carl Doersch, Ted Xiao, Dhruv Shah, Fei Xia, Dorsa Sadigh, and Sean Kirmani. Gen2act: Human video generation in novel scenarios enables generalizable robot manipulation.arXiv preprint arXiv:2409.16283, 2024. 3
- [5]
-
[6]
$\pi_0$: A Vision-Language-Action Flow Model for General Robot Control
Kevin Black, Noah Brown, Danny Driess, Adnan Esmail, Michael Equi, Chelsea Finn, Niccolo Fusai, Lachy Groom, Karol Hausman, Brian Ichter, et al. Pi0: A vision-language-action flow model for general robot control.arXiv preprint arXiv:2410.24164, 2024. 1
work page internal anchor Pith review arXiv 2024
-
[7]
Stable Video Diffusion: Scaling Latent Video Diffusion Models to Large Datasets
Andreas Blattmann, Tim Dockhorn, Sumith Kulal, Daniel Mendelevitch, Maciej Kilian, Dominik Lorenz, Yam Levi, Zion English, Vikram Voleti, Adam Letts, et al. Stable video diffusion: Scaling latent video diffusion models to large datasets.arXiv preprint arXiv:2311.15127, 2023. 3
work page internal anchor Pith review arXiv 2023
-
[8]
Align your latents: High-resolution video synthesis with latent diffusion models
Andreas Blattmann, Robin Rombach, Huan Ling, Tim Dockhorn, Seung Wook Kim, Sanja Fidler, and Karsten Kreis. Align your latents: High-resolution video synthesis with latent diffusion models. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 22563–22575,
-
[9]
Genie: Generative interactive environments
Jake Bruce, Michael D Dennis, Ashley Edwards, Jack Parker-Holder, Yuge Shi, Edward Hughes, Matthew Lai, Aditi Mavalankar, Richie Steigerwald, Chris Apps, et al. Genie: Generative interactive environments. InForty-first International Conference on Machine Learning, 2024. 3
2024
-
[10]
Closed-loop visuomotor control with generative expectation for robotic manipulation
Qingwen Bu, Jia Zeng, Li Chen, Yanchao Yang, Guyue Zhou, Junchi Yan, Ping Luo, Heming Cui, Yi Ma, and Hongyang Li. Closed-loop visuomotor control with generative expectation for robotic manipulation. Advances in Neural Information Processing Systems, 2024. 1
2024
-
[11]
Qingwen Bu, Jisong Cai, Li Chen, Xiuqi Cui, Yan Ding, Siyuan Feng, Shenyuan Gao, Xindong He, Xuan Hu, Xu Huang, et al. Agibot world colosseo: A large-scale manipulation platform for scalable and intelligent embodied systems.arXiv preprint arXiv:2503.06669, 2025. 2
work page internal anchor Pith review arXiv 2025
-
[12]
GR-2: A Generative Video-Language-Action Model with Web-Scale Knowledge for Robot Manipulation
Chi-Lam Cheang, Guangzeng Chen, Ya Jing, Tao Kong, Hang Li, Yifeng Li, Yuxiao Liu, Hongtao Wu, Jiafeng Xu, Yichu Yang, et al. Gr-2: A generative video-language-action model with web-scale knowledge for robot manipulation.arXiv preprint arXiv:2410.06158, 2024. 3
work page internal anchor Pith review arXiv 2024
-
[13]
Gr-3 technical report.arXiv preprint arXiv:2507.15493,
Chilam Cheang, Sijin Chen, Zhongren Cui, Yingdong Hu, Liqun Huang, Tao Kong, Hang Li, Yifeng Li, Yuxiao Liu, Xiao Ma, et al. Gr-3 technical report.arXiv preprint arXiv:2507.15493, 2025. 1 14 StableIDM: Stabilizing Inverse Dynamics Model against Manipulator Truncation via Spatio-Temporal Refinement
-
[14]
Tianxing Chen, Zanxin Chen, Baijun Chen, Zijian Cai, Yibin Liu, Zixuan Li, Qiwei Liang, Xianliang Lin, Yiheng Ge, Zhenyu Gu, et al. Robotwin 2.0: A scalable data generator and benchmark with strong domain randomization for robust bimanual robotic manipulation.arXiv preprint arXiv:2506.18088, 2025. 2
work page internal anchor Pith review arXiv 2025
-
[15]
Diffusion policy: Visuomotor policy learning via action diffusion.The International Journal of Robotics Research, 2023
Cheng Chi, Zhenjia Xu, Siyuan Feng, Eric Cousineau, Yilun Du, Benjamin Burchfiel, Russ Tedrake, and Shuran Song. Diffusion policy: Visuomotor policy learning via action diffusion.The International Journal of Robotics Research, 2023. 2
2023
-
[16]
arXiv preprint arXiv:2509.22642 (2025)
Xiaowei Chi, Peidong Jia, Chun-Kai Fan, Xiaozhu Ju, Weishi Mi, Kevin Zhang, Zhiyuan Qin, Wanxin Tian, Kuangzhi Ge, Hao Li, et al. Wow: Towards a world omniscient world model through embodied interaction.arXiv preprint arXiv:2509.22642, 2025. 1, 3
-
[17]
An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale
Alexey Dosovitskiy, Lucas Beyer, Alexander Kolesnikov, Dirk Weissenborn, Xiaohua Zhai, Thomas Un- terthiner, Mostafa Dehghani, Matthias Minderer, Georg Heigold, Sylvain Gelly, et al. An image is worth 16x16 words: Transformers for image recognition at scale.arXiv preprint arXiv:2010.11929, 2020. 4
work page internal anchor Pith review Pith/arXiv arXiv 2010
-
[18]
Learning universal policies via text-guided video generation.Advances in neural information processing systems, 2023
Yilun Du, Sherry Yang, Bo Dai, Hanjun Dai, Ofir Nachum, Josh Tenenbaum, Dale Schuurmans, and Pieter Abbeel. Learning universal policies via text-guided video generation.Advances in neural information processing systems, 2023. 1, 3
2023
-
[19]
Bridge Data: Boosting Generalization of Robotic Skills with Cross-Domain Datasets
Frederik Ebert, Yanlai Yang, Karl Schmeckpeper, Bernadette Bucher, Georgios Georgakis, Kostas Daniilidis, Chelsea Finn, and Sergey Levine. Bridge data: Boosting generalization of robotic skills with cross-domain datasets.arXiv preprint arXiv:2109.13396, 2021. 2
work page internal anchor Pith review arXiv 2021
-
[20]
Yao Feng, Hengkai Tan, Xinyi Mao, Guodong Liu, Shuhe Huang, Chendong Xiang, Hang Su, and Jun Zhu. Vidar: Embodied video diffusion model for generalist bimanual manipulation.arXiv preprint arXiv:2507.12898, 2025. 1, 3, 7
-
[21]
Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation
Zipeng Fu, Tony Z Zhao, and Chelsea Finn. Mobile aloha: Learning bimanual mobile manipulation with low-cost whole-body teleoperation.arXiv preprint arXiv:2401.02117, 2024. 2
work page internal anchor Pith review arXiv 2024
-
[22]
Deep residual learning for image recognition
Kaiming He, Xiangyu Zhang, Shaoqing Ren, and Jian Sun. Deep residual learning for image recognition. InProceedings of the IEEE conference on computer vision and pattern recognition, 2016. 7
2016
-
[23]
CogVideo: Large-scale Pretraining for Text-to-Video Generation via Transformers
Wenyi Hong, Ming Ding, Wendi Zheng, Xinghan Liu, and Jie Tang. Cogvideo: Large-scale pretraining for text-to-video generation via transformers.arXiv preprint arXiv:2205.15868, 2022. 3
work page internal anchor Pith review arXiv 2022
-
[24]
EgoDex: Learning Dexterous Manipulation from Large-Scale Egocentric Video,
Ryan Hoque, Peide Huang, David J Yoon, Mouli Sivapurapu, and Jian Zhang. Egodex: Learning dexterous manipulation from large-scale egocentric video.arXiv preprint arXiv:2505.11709, 2025. 1
-
[25]
Video Prediction Policy: A Generalist Robot Policy with Predictive Visual Representations
Yucheng Hu, Yanjiang Guo, Pengchao Wang, Xiaoyu Chen, Yen-Jen Wang, Jianke Zhang, Koushil Sreenath, Chaochao Lu, and Jianyu Chen. Video prediction policy: A generalist robot policy with predictive visual representations.arXiv preprint arXiv:2412.14803, 2024. 3
work page internal anchor Pith review arXiv 2024
-
[26]
$\pi_{0.5}$: a Vision-Language-Action Model with Open-World Generalization
Physical Intelligence, Kevin Black, Noah Brown, James Darpinian, Karan Dhabalia, Danny Driess, Adnan Esmail, Michael Equi, Chelsea Finn, Niccolo Fusai, et al. Pi0.5: a vision-language-action model with open-world generalization.arXiv preprint arXiv:2504.16054, 2025. 1
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[27]
Dreamgen: Unlocking generalization in robot learning through neural trajectories.arXiv e-prints, 2025
Joel Jang, Seonghyeon Ye, Zongyu Lin, Jiannan Xiang, Johan Bjorck, Yu Fang, Fengyuan Hu, Spencer Huang, Kaushil Kundalia, Yen-Chen Lin, et al. Dreamgen: Unlocking generalization in robot learning through neural trajectories.arXiv e-prints, 2025. 1, 3
2025
-
[28]
Galaxea open-world dataset and g0 dual-system vla model.arXiv preprint arXiv:2509.00576,
Tao Jiang, Tianyuan Yuan, Yicheng Liu, Chenhao Lu, Jianning Cui, Xiao Liu, Shuiqi Cheng, Jiyang Gao, Huazhe Xu, and Hang Zhao. Galaxea open-world dataset and g0 dual-system vla model.arXiv preprint arXiv:2509.00576, 2025. 1 15 StableIDM: Stabilizing Inverse Dynamics Model against Manipulator Truncation via Spatio-Temporal Refinement
-
[29]
OpenVLA: An Open-Source Vision-Language-Action Model
Moo Jin Kim, Karl Pertsch, Siddharth Karamcheti, Ted Xiao, Ashwin Balakrishna, Suraj Nair, Rafael Rafailov, Ethan Foster, Grace Lam, Pannag Sanketi, et al. Openvla: An open-source vision-language-action model.arXiv preprint arXiv:2406.09246, 2024. 3
work page internal anchor Pith review arXiv 2024
-
[30]
Segment anything
Alexander Kirillov, Eric Mintun, Nikhila Ravi, Hanzi Mao, Chloe Rolland, Laura Gustafson, Tete Xiao, Spencer Whitehead, Alexander C Berg, Wan-Yen Lo, et al. Segment anything. InProceedings of the IEEE/CVF international conference on computer vision, 2023. 5
2023
-
[31]
HunyuanVideo: A Systematic Framework For Large Video Generative Models
Weijie Kong, Qi Tian, Zijian Zhang, Rox Min, Zuozhuo Dai, Jin Zhou, Jiangfeng Xiong, Xin Li, Bo Wu, Jianwei Zhang, et al. Hunyuanvideo: A systematic framework for large video generative models.arXiv preprint arXiv:2412.03603, 2024. 3
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[32]
Shuang Li, Yihuai Gao, Dorsa Sadigh, and Shuran Song. Unified video action model.arXiv preprint arXiv:2503.00200, 2025. 3
work page internal anchor Pith review arXiv 2025
-
[33]
RDT-1B: a Diffusion Foundation Model for Bimanual Manipulation
Songming Liu, Lingxuan Wu, Bangguo Li, Hengkai Tan, Huayu Chen, Zhengyi Wang, Ke Xu, Hang Su, and Jun Zhu. Rdt-1b: a diffusion foundation model for bimanual manipulation.arXiv preprint arXiv:2410.07864, 2024. 2
work page internal anchor Pith review arXiv 2024
-
[34]
Sora: A Review on Background, Technology, Limitations, and Opportunities of Large Vision Models
Yixin Liu, Kai Zhang, Yuan Li, Zhiling Yan, Chujie Gao, Ruoxi Chen, Zhengqing Yuan, Yue Huang, Hanchi Sun, Jianfeng Gao, et al. Sora: A review on background, technology, limitations, and opportunities of large vision models.arXiv preprint arXiv:2402.17177, 2024. 3
work page internal anchor Pith review arXiv 2024
-
[35]
Octo: An open-source generalist robot policy, 2024
Oier Mees, Dibya Ghosh, Karl Pertsch, Kevin Black, Homer Rich Walke, Sudeep Dasari, Joey Hejna, Tobias Kreiman, Charles Xu, Jianlan Luo, et al. Octo: An open-source generalist robot policy, 2024. 3
2024
-
[36]
Robotwin: Dual-arm robot benchmark with generative digital twins (early version)
Yao Mu, Tianxing Chen, Shijia Peng, Zanxin Chen, Zeyu Gao, Yude Zou, Lunkai Lin, Zhiqiang Xie, and Ping Luo. Robotwin: Dual-arm robot benchmark with generative digital twins (early version). InEuropean Conference on Computer Vision, 2024. 2
2024
-
[37]
DINOv2: Learning Robust Visual Features without Supervision
Maxime Oquab, Timothée Darcet, Théo Moutakanni, Huy Vo, Marc Szafraniec, Vasil Khalidov, Pierre Fernandez, Daniel Haziza, Francisco Massa, Alaaeldin El-Nouby, et al. Dinov2: Learning robust visual features without supervision.arXiv preprint arXiv:2304.07193, 2023. 5
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[38]
Open x-embodiment: Robotic learning datasets and rt-x models: Open x-embodiment collaboration 0
Abby O’Neill, Abdul Rehman, Abhiram Maddukuri, Abhishek Gupta, Abhishek Padalkar, Abraham Lee, Acorn Pooley, Agrim Gupta, Ajay Mandlekar, Ajinkya Jain, et al. Open x-embodiment: Robotic learning datasets and rt-x models: Open x-embodiment collaboration 0. In2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE. 2, 3
-
[39]
Diffusion policy policy optimization
Allen Z Ren, Justin Lidard, Lars L Ankile, Anthony Simeonov, Pulkit Agrawal, Anirudha Majumdar, Benjamin Burchfiel, Hongkai Dai, and Max Simchowitz. Diffusion policy policy optimization.arXiv preprint arXiv:2409.00588, 2024. 2
-
[40]
Manibox: Enhancing spatial grasping generalization via scalable simulation data generation
Hengkai Tan, Xuezhou Xu, Chengyang Ying, Xinyi Mao, Songming Liu, Xingxing Zhang, Hang Su, and Jun Zhu. Manibox: Enhancing spatial grasping generalization via scalable simulation data generation. arXiv preprint arXiv:2411.01850, 2024. 2
-
[41]
AnyPos: Automated Task-Agnostic Actions for Bimanual Manipulation
Hengkai Tan, Yao Feng, Xinyi Mao, Shuhe Huang, Guodong Liu, Zhongkai Hao, Hang Su, and Jun Zhu. Anypos: Automated task-agnostic actions for bimanual manipulation.arXiv preprint arXiv:2507.12768,
work page internal anchor Pith review Pith/arXiv arXiv
-
[42]
arXiv preprint arXiv:2510.19430 (2025)
GigaBrain Team, Angen Ye, Boyuan Wang, Chaojun Ni, Guan Huang, Guosheng Zhao, Haoyun Li, Jie Li, Jiagang Zhu, Lv Feng, et al. Gigabrain-0: A world model-powered vision-language-action model.arXiv preprint arXiv:2510.19430, 2025. 1 16 StableIDM: Stabilizing Inverse Dynamics Model against Manipulator Truncation via Spatio-Temporal Refinement
-
[43]
arXiv preprint arXiv:2412.15109 (2024)
Yang Tian, Sizhe Yang, Jia Zeng, Ping Wang, Dahua Lin, Hao Dong, and Jiangmiao Pang. Predictive inverse dynamics models are scalable learners for robotic manipulation.arXiv preprint arXiv:2412.15109,
-
[44]
Attention is all you need.Advances in neural information processing systems, 2017
Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones, Aidan N Gomez, Łukasz Kaiser, and Illia Polosukhin. Attention is all you need.Advances in neural information processing systems, 2017. 4
2017
-
[45]
Wan: Open and Advanced Large-Scale Video Generative Models
Team Wan, Ang Wang, Baole Ai, Bin Wen, Chaojie Mao, Chen-Wei Xie, Di Chen, Feiwu Yu, Haiming Zhao, Jianxiao Yang, et al. Wan: Open and advanced large-scale video generative models.arXiv preprint arXiv:2503.20314, 2025. 3
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[46]
Vidman: Exploiting implicit dynamics from video diffusion model for effective robot manipulation.Advances in Neural Information Processing Systems, 2024
Youpeng Wen, Junfan Lin, Yi Zhu, Jianhua Han, Hang Xu, Shen Zhao, and Xiaodan Liang. Vidman: Exploiting implicit dynamics from video diffusion model for effective robot manipulation.Advances in Neural Information Processing Systems, 2024. 3
2024
-
[47]
Unleashing Large-Scale Video Generative Pre-training for Visual Robot Manipulation
Hongtao Wu, Ya Jing, Chilam Cheang, Guangzeng Chen, Jiafeng Xu, Xinghang Li, Minghuan Liu, Hang Li, and Tao Kong. Unleashing large-scale video generative pre-training for visual robot manipulation. arXiv preprint arXiv:2312.13139, 2023. 1
work page internal anchor Pith review arXiv 2023
-
[48]
Robomind: Benchmark on multi-embodiment intelligence normative data for robot manipulation,
Kun Wu, Chengkai Hou, Jiaming Liu, Zhengping Che, Xiaozhu Ju, Zhuqin Yang, Meng Li, Yinuo Zhao, Zhiyuan Xu, Guang Yang, et al. Robomind: Benchmark on multi-embodiment intelligence normative data for robot manipulation.arXiv preprint arXiv:2412.13877, 2024. 2
-
[49]
CogVideoX: Text-to-Video Diffusion Models with An Expert Transformer
Zhuoyi Yang, Jiayan Teng, Wendi Zheng, Ming Ding, Shiyu Huang, Jiazheng Xu, Yuanming Yang, Wenyi Hong, Xiaohan Zhang, Guanyu Feng, et al. Cogvideox: Text-to-video diffusion models with an expert transformer.arXiv preprint arXiv:2408.06072, 2024. 3
work page internal anchor Pith review arXiv 2024
-
[50]
Chengbo Yuan, Suraj Joshi, Shaoting Zhu, Hang Su, Hang Zhao, and Yang Gao. Roboengine: Plug-and- play robot data augmentation with semantic robot segmentation and background generation.arXiv preprint arXiv:2503.18738, 2025. 1
-
[51]
3D Diffusion Policy: Generalizable Visuomotor Policy Learning via Simple 3D Representations
Yanjie Ze, Gu Zhang, Kangning Zhang, Chenyuan Hu, Muhan Wang, and Huazhe Xu. 3d diffusion policy: Generalizable visuomotor policy learning via simple 3d representations.arXiv preprint arXiv:2403.03954,
work page internal anchor Pith review arXiv
-
[52]
Igniting vlms toward the embodied space.arXiv preprint arXiv:2509.11766, 2025
Andy Zhai, Brae Liu, Bruno Fang, Chalse Cai, Ellie Ma, Ethan Yin, Hao Wang, Hugo Zhou, James Wang, Lights Shi, et al. Igniting vlms toward the embodied space.arXiv preprint arXiv:2509.11766, 2025. 1
-
[53]
Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware
Tony Z Zhao, Vikash Kumar, Sergey Levine, and Chelsea Finn. Learning fine-grained bimanual manipula- tion with low-cost hardware.arXiv preprint arXiv:2304.13705, 2023. 2
work page internal anchor Pith review arXiv 2023
-
[54]
Aloha unleashed: A simple recipe for robot dexterity.arXiv preprint arXiv:2410.13126,
Tony Z Zhao, Jonathan Tompson, Danny Driess, Pete Florence, Kamyar Ghasemipour, Chelsea Finn, and Ayzaan Wahid. Aloha unleashed: A simple recipe for robot dexterity.arXiv preprint arXiv:2410.13126,
-
[55]
Siyuan Zhou, Yilun Du, Jiaben Chen, Yandong Li, Dit-Yan Yeung, and Chuang Gan. Robodreamer: Learning compositional world models for robot imagination.arXiv preprint arXiv:2404.12377, 2024. 1, 3, 4, 7 17
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.