Assessing the Challenges of Collective Perception via V2I Communications in High-Speed Scenarios with Open Road Testing
Pith reviewed 2026-05-09 23:36 UTC · model grok-4.3
The pith
Infrastructure-assisted collective perception extends highway object detection range but is limited by detection processing and asynchronous message timing.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
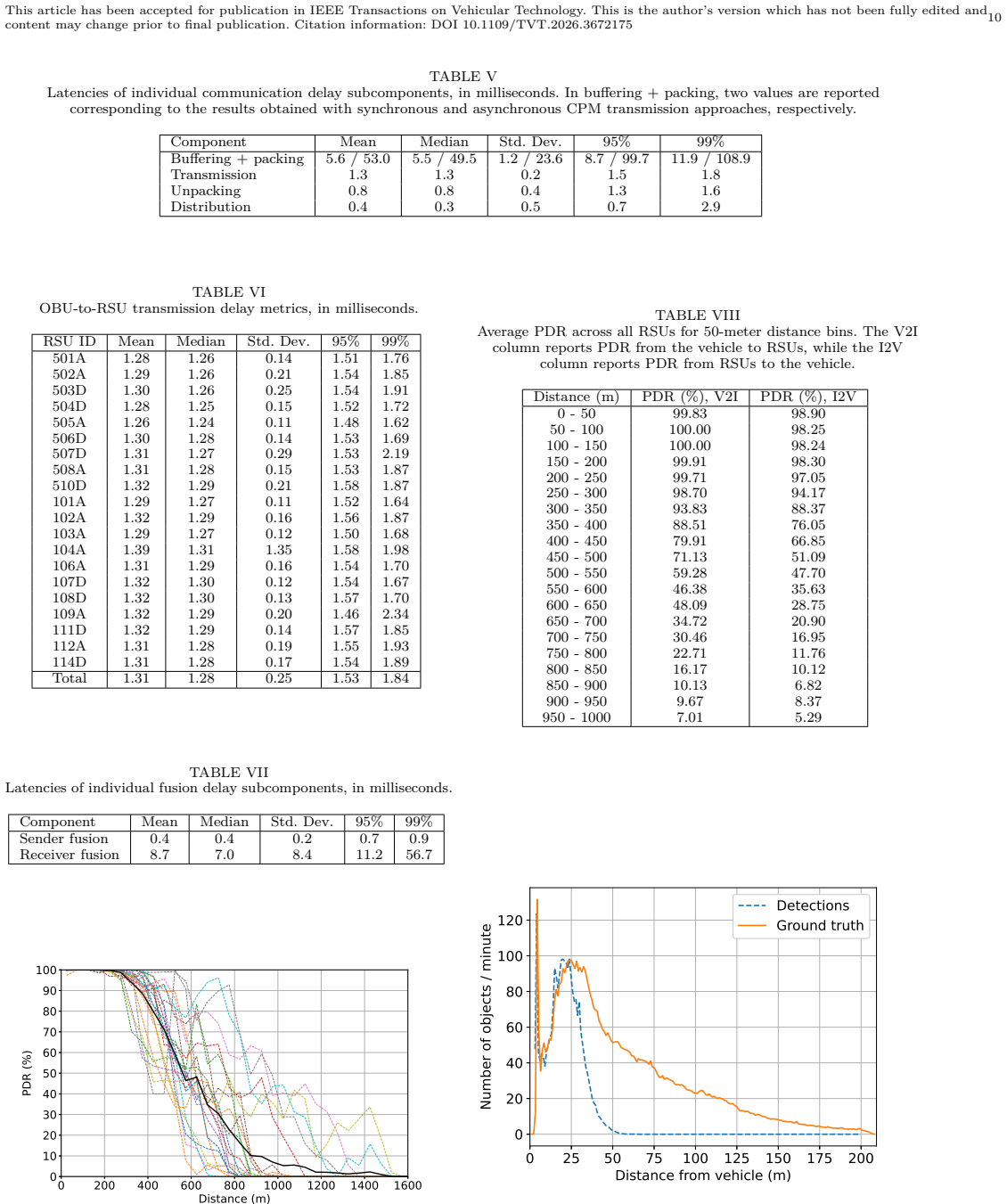
Open-road tests in the Bizkaia Connected Corridor reveal that object detection and asynchronous transmission of collective perception messages are the primary latency bottlenecks in the infrastructure-assisted collective perception system. Synchronizing the transmission of these messages with local perception processing reduces end-to-end delays by up to 33 percent. Onboard perception systems struggle to detect objects beyond 50 meters, whereas ITS-G5 communication ranges significantly exceed this limit, underscoring the role of collective perception for highway safety.
What carries the argument
End-to-end V2X latency breakdown across system components paired with independent sensor ground truth annotation to isolate perception errors beyond detection models.
If this is right
- Synchronizing collective perception message transmission with local perception processing can lower overall system delays in high-speed conditions.
- Infrastructure sharing becomes necessary on highways because onboard detection ranges fall short of communication capabilities.
- System designs should target faster object detection and better timing alignment to improve responsiveness.
- The identified bottlenecks provide concrete targets for optimizing future cooperative mobility deployments.
Where Pith is reading between the lines
- Edge-based detection acceleration or predictive scheduling of messages could address the latency sources left after synchronization.
- Repeating the evaluation on straight roads or under varied weather would test whether road curvature affects the measured ranges and delays.
- Combining collective perception with other V2X message types might compound the latency savings observed here.
Load-bearing premise
The open-road tests in the Bizkaia Connected Corridor with its specific winding highway and traffic represent general high-speed scenarios, and the independent sensor setup fully captures all non-detection errors such as synchronization and calibration.
What would settle it
A replication test in a straight high-speed highway setting where synchronizing collective perception messages produces no measurable latency reduction or where onboard detection reliably identifies objects past 50 meters would contradict the reported bottlenecks.
Figures
read the original abstract
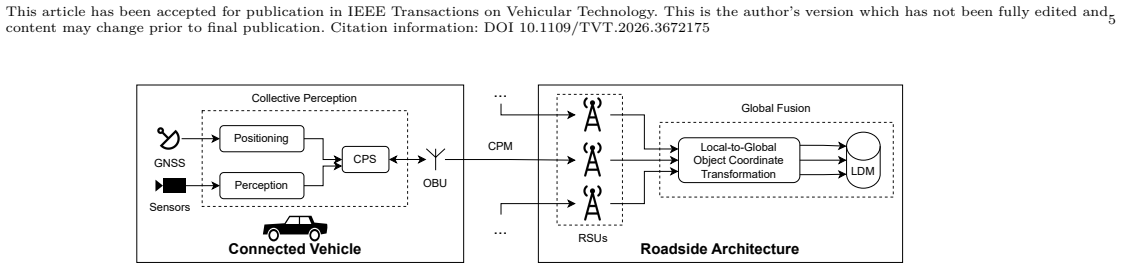
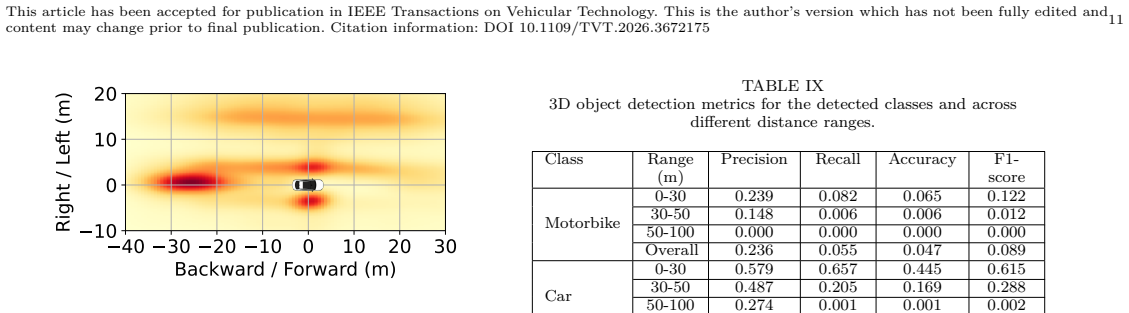
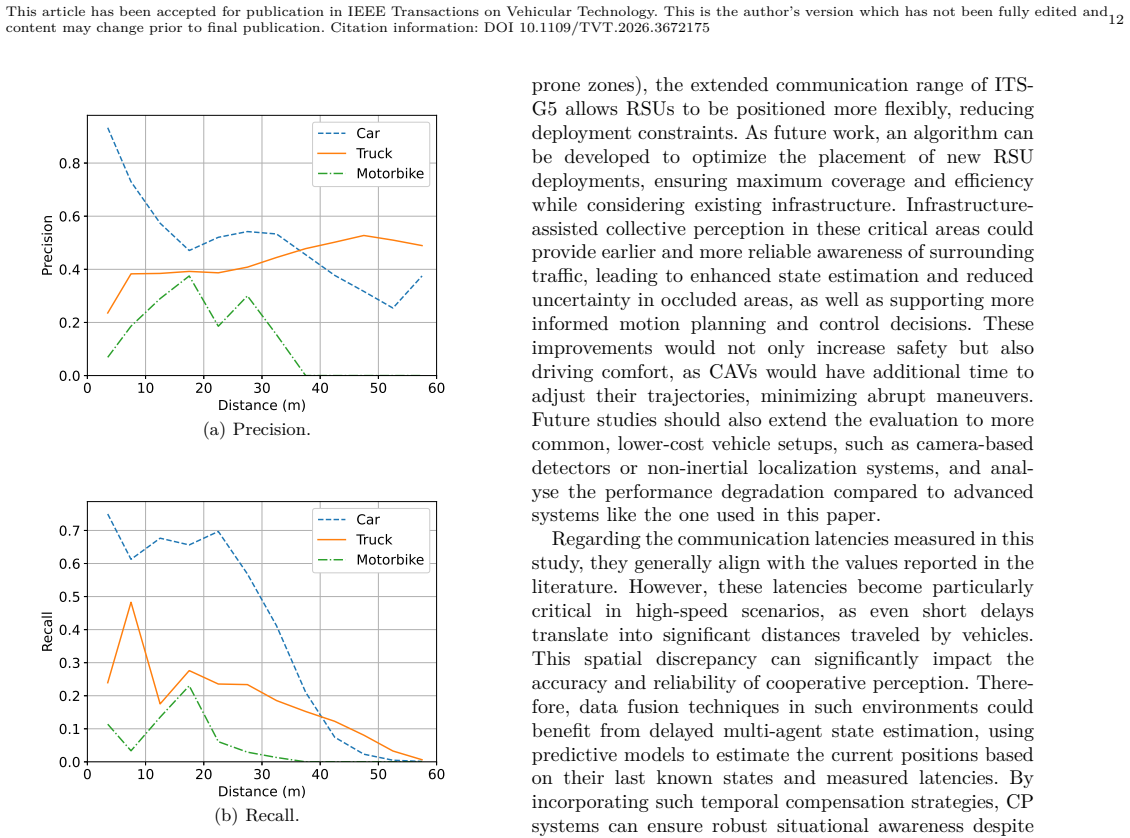
This paper presents a comprehensive end-to-end evaluation of an infrastructure-assisted collective perception (ICP) system deployed on a highway using ITS-G5 technology. Open-road tests were conducted in the Bizkaia Connected Corridor (BCC), an operational corridor which covers a winding highway, enabling a realistic assessment of system performance in diverse traffic scenarios. The evaluation included three main aspects: (1) end-to-end Vehicle-to-Everything (V2X) communication latency, with a breakdown of delays introduced by each system component; (2) the effective range of ITS-G5 communications between vehicles and infrastructure; and (3) the perception system, using an independent sensor setup for ground truth annotation to account for errors beyond the detection model, such as synchronization, localization, and calibration inaccuracies. The results reveal that object detection and asynchronous transmission of collective perception messages (CPMs) are major latency bottlenecks, with results showing that synchronizing CPM transmission with local perception can reduce delays by up to 33%. Additionally, onboard perception struggles with detecting objects beyond 50 meters, highlighting the importance of collective perception in highway environments, where communication ranges significantly exceed detection limits. The findings provide valuable insights to optimize ICP deployments, supporting safer and more efficient cooperative mobility systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
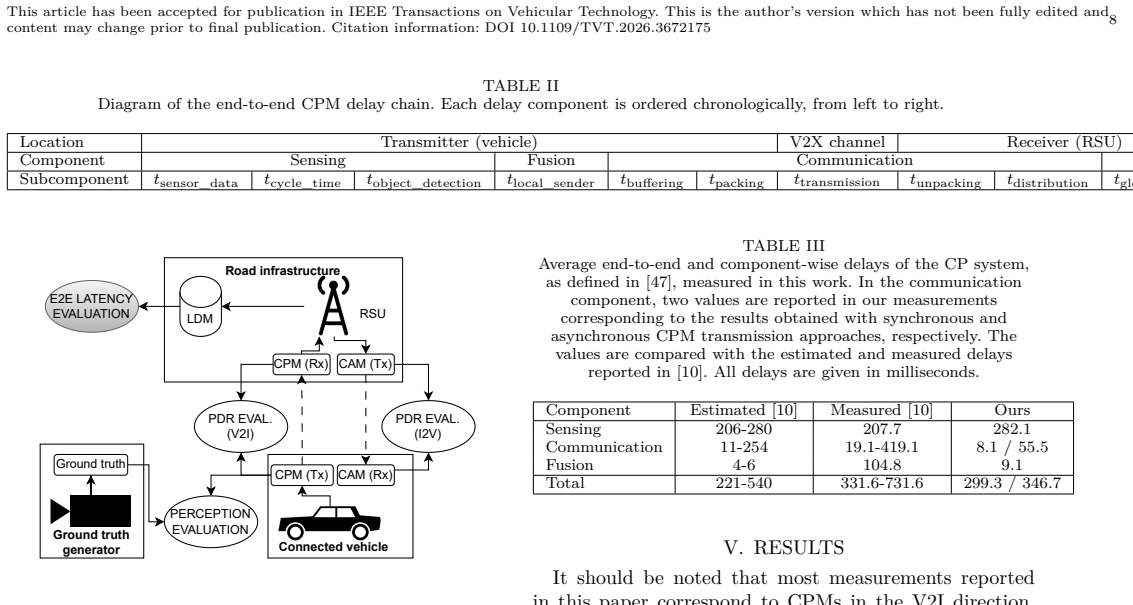
Summary. The manuscript reports on open-road experiments evaluating an infrastructure-assisted collective perception system using ITS-G5 V2I communications in the Bizkaia Connected Corridor. It provides a breakdown of end-to-end latency, measures the effective communication range, and evaluates perception performance against independent sensor ground truth that accounts for synchronization, localization, and calibration errors. The results identify object detection and asynchronous CPM transmission as major latency bottlenecks and show that synchronizing CPM transmission with local perception can reduce delays by up to 33%. Onboard perception is found to be limited to 50 meters, while communication ranges are significantly larger.
Significance. This empirical study contributes valuable real-world measurements from an operational highway testbed to the field of cooperative intelligent transportation systems. The independent ground truth approach strengthens the validity of the perception and latency assessments. If the findings are representative, they offer actionable insights for optimizing collective perception deployments to improve safety and efficiency in high-speed vehicular environments by addressing specific bottlenecks.
minor comments (2)
- The abstract and results would be strengthened by reporting the number of experimental trials, vehicles, and objects observed, along with measures of statistical significance or variability for the 33% latency reduction and 50 m detection range claims.
- A brief discussion of how the specific conditions of the winding highway in the Bizkaia Connected Corridor may or may not generalize to other high-speed scenarios would help contextualize the findings on communication range and perception limits.
Simulated Author's Rebuttal
We thank the referee for their positive evaluation of the manuscript, the recognition of its empirical contributions from the Bizkaia Connected Corridor testbed, and the recommendation for minor revision. No specific major comments were provided in the report.
Circularity Check
No circularity: purely empirical measurement study
full rationale
The paper conducts open-road tests and reports direct latency breakdowns, communication ranges, and perception accuracies from the Bizkaia Connected Corridor. No equations, fitted models, predictions, or derivations are present that could reduce to inputs by construction. Results are observations against independent ground truth sensors; no self-citations, ansatzes, or uniqueness claims appear in the abstract or described content. The study is self-contained as measurement, with no load-bearing logical steps that qualify under the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The Bizkaia Connected Corridor with its winding highway and traffic conditions is representative of general high-speed scenarios for collective perception evaluation.
Reference graph
Works this paper leans on
-
[1]
Guidance for day 2 and beyond roadmap,
C. . C. C. Consortium et al., “Guidance for day 2 and beyond roadmap,” Car2Car Communication Consortium, C2CCC WP, vol. 2072, 2019
work page 2072
-
[2]
S. Vía, M. Payaró, K. Eckert, M. Mühleisen, S. Wendt, E. Fischer, D. Hetzer, and A. Kousaridas, “5GCroCo: Key 5G technologies and trial results for seamless cross-border CAM services (Invited Paper),” in 2022 IEEE Future Networks World Forum (FNWF), 2022, pp. 24–27
work page 2022
-
[3]
Challenges and Solutions for Service Con- tinuity in Inter-PLMN Handover for Vehicular Applications,
Z. Fernández, A. Martín, J. Pérez, M. García, G. Velez, F. Mur- ciano, and S. Peters, “Challenges and Solutions for Service Con- tinuity in Inter-PLMN Handover for Vehicular Applications,” IEEE Access, vol. 11, pp. 8904–8919, 2023
work page 2023
-
[4]
N. Slamnik-Kriještorac, W. Vandenberghe, X. Limani, E. Oost- endorp, E. de Groote, V. Maglogiannis, D. Naudts, P.-P. Schack- mann, R. Kusumakar, K. Kural, G. Kia, M. C. Campodonico, I. Moerman, and J. M. Marquez-Barja, “5G-enhanced Teleop- eration in Real-Life Port Environments: Lessons Learned from the 5G-Blueprint Project,” in 2024 Joint European Confer...
work page 2024
-
[5]
F. Vázquez-Gallego, J. Nasreddine, M. Codina, B. Cordero, E. Carmona-Cejudo, M. Trullenque, D. Camps-Mur, Y. Murillo, P. Seguret, J. Polo, and J. L. Luque, “Performance Evaluation of 5G Standalone Seamless Home Routed Roaming for Con- nected Mobility in Cross-Border Scenarios,” in 2024 IEEE 99th Vehicular Technology Conference (VTC2024-Spring), 2024, pp. 1–7
work page 2024
-
[6]
DSRC Versus LTE-V2X: Empirical Performance Analysis of Direct Vehicular Communication Technologies,
E. Moradi-Pari, D. Tian, M. Bahramgiri, S. Rajab, and S. Bai, “DSRC Versus LTE-V2X: Empirical Performance Analysis of Direct Vehicular Communication Technologies,” IEEE Trans- actions on Intelligent Transportation Systems, vol. 24, no. 5, pp. 4889–4903, 2023
work page 2023
-
[7]
M. Guerrieri, R. Mauro, A. Pompigna, and N. Isaenko, “Road Design Criteria and Capacity Estimation Based on Autonomous Vehicles Performances. First Results from the European C- Roads Platform and A22 Motorway,” Transport and Telecom- munication Journal, vol. 22, no. 2, pp. 230–243, 2021
work page 2021
-
[8]
J. Kang, S. Tak, and S. Park, “Analyzing the Impact of C-ITS Services on Driving Behavior: A Case Study of the Daejeon–Sejong C-ITS Pilot Project in South Korea,” Sustainability, vol. 15, no. 16, 2023. [Online]. A vailable: https://www.mdpi.com/2071-1050/15/16/12655
work page 2023
-
[9]
On the real evaluation of a collective perception service,
P. Almeida, A. Figueiredo, P. Rito, M. Luís, and S. Sargento, “On the real evaluation of a collective perception service,” in NOMS 2023-2023 IEEE/IFIP Network Operations and Man- agement Symposium. IEEE, 2023, pp. 1–6
work page 2023
-
[10]
Col- lective perception: A delay evaluation with a short discussion on channel load,
C. Pilz, P. Sammer, E. Piri, U. Grossschedl, G. Steinbauer- Wagner, L. Kuschnig, A. Steinberger, and M. Schratter, “Col- lective perception: A delay evaluation with a short discussion on channel load,” IEEE Open Journal of Intelligent Transportation Systems, 2023
work page 2023
-
[11]
Z. Bai, G. Wu, M. J. Barth, Y. Liu, E. Akin Sisbot, K. Oguchi, and Z. Huang, “A Survey and Framework of Cooperative Perception: From Heterogeneous Singleton to Hierarchical Co- operation,” IEEE Transactions on Intelligent Transportation Systems, vol. 25, no. 11, pp. 15 191–15 209, 2024
work page 2024
-
[12]
Keypoints-based deep feature fusion for cooperative vehicle detection of autonomous driving,
Y. Yuan, H. Cheng, and M. Sester, “Keypoints-based deep feature fusion for cooperative vehicle detection of autonomous driving,” IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 3054–3061, 2022
work page 2022
-
[13]
Q. Chen, X. Ma, S. Tang, J. Guo, Q. Yang, and S. Fu, “F-cooper: Feature based cooperative perception for autonomous vehicle edge computing system using 3d point clouds,” in Proceedings of the 4th ACM/IEEE Symposium on Edge Computing, 2019, pp. 88–100
work page 2019
-
[14]
Efficient Vehicular Collaborative Perception Based on Saptial-Temporal Feature Compression,
J. Zhang, K. Yang, H. Wang, P. Sun, and L. Song, “Efficient Vehicular Collaborative Perception Based on Saptial-Temporal Feature Compression,” IEEE Transactions on Vehicular Tech- nology, vol. 73, no. 11, pp. 16 125–16 133, 2024
work page 2024
-
[15]
I. ETSI, “Intelligent transport system (its); vehicular commu- nications; basic set of applications; analysis of the collective- perception service (cps),” Draft TR 103 562 V0. 0.15, 2019
work page 2019
-
[16]
A tutorial on the lte-v2x direct communication,
A. Hajisami, J. Lansford, A. Dingankar, and J. Misener, “A tutorial on the lte-v2x direct communication,” IEEE Open Journal of Vehicular Technology, vol. 3, pp. 388–398, 2022
work page 2022
-
[17]
Data streaming platform for crowd-sourced vehicle dataset generation,
F. Mogollon, Z. Fernandez, A. Martin, J. D. Ortega, and G. Velez, “Data streaming platform for crowd-sourced vehicle dataset generation,” IEEE Transactions on Intelligent Vehicles, pp. 1–10, 2024
work page 2024
-
[18]
A C-ITS Architecture for MEC and Cloud Native Back-End Services,
J. Arin, G. Velez, and P. Bustamante, “A C-ITS Architecture for MEC and Cloud Native Back-End Services,” IEEE Access, vol. 12, pp. 64 531–64 550, 2024
work page 2024
-
[19]
Collabora- tive perception—the missing piece in realizing fully autonomous driving,
S. Malik, M. J. Khan, M. A. Khan, and H. El-Sayed, “Collabora- tive perception—the missing piece in realizing fully autonomous driving,” Sensors, vol. 23, no. 18, p. 7854, 2023
work page 2023
-
[20]
Uncertainty-aware task offloading for multi-vehicle perception fusion over vehicular edge computing,
Y.-J. Ku, S. Baidya, and S. Dey, “Uncertainty-aware task offloading for multi-vehicle perception fusion over vehicular edge computing,” IEEE Transactions on Vehicular Technology, vol. 72, no. 11, pp. 14 906–14 923, 2023
work page 2023
-
[21]
Accounting for the special role of infrastructure-assisted collective perception,
F. A. Schiegg, A.-L. Rueeck, J. Gamerdinger, H. Tchouankem, E. Xhoxhi, and G. Volk, “Accounting for the special role of infrastructure-assisted collective perception,” in 2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2023, pp. 189–195
work page 2023
-
[22]
Collective perception service for connected vehicles and roadside infras- tructure,
A. Chtourou, P. Merdrignac, and O. Shagdar, “Collective perception service for connected vehicles and roadside infras- tructure,” in 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring). IEEE, 2021, pp. 1–5
work page 2021
-
[23]
Performance modelling of v2v based collective perceptions in connected and autonomous vehicles,
H. Huang, W. Fang, and H. Li, “Performance modelling of v2v based collective perceptions in connected and autonomous vehicles,” in 2019 IEEE 44th Conference on Local Computer Networks (LCN). IEEE, 2019, pp. 356–363
work page 2019
-
[24]
V. A. Wolff, “Infrastructure-Assisted Collective Perception Ser- vice with Emphasis on Vulnerable Road User Perception,” in International Conference on Smart Cities and Green ICT Systems. Springer, 2023, pp. 197–211
work page 2023
-
[25]
Infrastructure assisted efficient collective perception service for connected vehicles,
A. Merwaday, S. C. Jha, K. Sivanesan, I. J. Alvarez, L. G. Bal- tar, V. R. S. Banjade, and S. A. Sehra, “Infrastructure assisted efficient collective perception service for connected vehicles,” in 2021 IEEE Vehicular Networking Conference (VNC). IEEE, 2021, pp. 119–120
work page 2021
-
[26]
Mass: Mobility- aware sensor scheduling of cooperative perception for connected automated driving,
Y. Jia, R. Mao, Y. Sun, S. Zhou, and Z. Niu, “Mass: Mobility- aware sensor scheduling of cooperative perception for connected automated driving,” IEEE Transactions on Vehicular Technol- ogy, vol. 72, no. 11, pp. 14 962–14 977, 2023
work page 2023
-
[28]
Tracking accuracy based generation rules of collective perception messages,
L. Shule and V. A. Wolff, “Tracking accuracy based generation rules of collective perception messages,” in 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2022, pp. 4157–4162
work page 2022
-
[29]
Context-aware content selection and message generation for collective percep- tion services,
A. Chtourou, P. Merdrignac, and O. Shagdar, “Context-aware content selection and message generation for collective percep- tion services,” Electronics, vol. 10, no. 20, p. 2509, 2021
work page 2021
-
[30]
Analysis of message generation rules for collective perception in connected and automated driving,
G. Thandavarayan, M. Sepulcre, and J. Gozalvez, “Analysis of message generation rules for collective perception in connected and automated driving,” in 2019 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2019, pp. 134–139
work page 2019
-
[31]
H. Masuda, O. El Marai, M. Tsukada, T. Taleb, and H. Esaki, “Feature-based vehicle identification framework for optimiza- tion of collective perception messages in vehicular networks,” IEEE Transactions on Vehicular Technology, vol. 72, no. 2, pp. 2120–2129, 2022
work page 2022
-
[32]
Y. Asabe, E. Javanmardi, J. Nakazato, M. Tsukada, and H. Esaki, “Enhancing reliability in infrastructure-based col- lective perception: A dual-channel hybrid delivery approach with real-time monitoring,” IEEE Open Journal of Vehicular Technology, vol. 5, pp. 1124–1138, 2024
work page 2024
-
[33]
Towards realistic evaluation of collective perception for connected and automated driving,
G. Volk, Q. Delooz, F. A. Schiegg, A. Von Bernuth, A. Festag, and O. Bringmann, “Towards realistic evaluation of collective perception for connected and automated driving,” in 2021 IEEE International Intelligent Transportation Systems Conference (ITSC). IEEE, 2021, pp. 1049–1056
work page 2021
-
[34]
Dair-v2x: A large-scale dataset for vehicle-infrastructure cooperative 3d object detection,
H. Yu, Y. Luo, M. Shu, Y. Huo, Z. Yang, Y. Shi, Z. Guo, H. Li, X. Hu, J. Yuan et al., “Dair-v2x: A large-scale dataset for vehicle-infrastructure cooperative 3d object detection,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 21 361–21 370
work page 2022
-
[35]
V2v4real: A real-world large- scale dataset for vehicle-to-vehicle cooperative perception,
R. Xu, X. Xia, J. Li, H. Li, S. Zhang, Z. Tu, Z. Meng, H. Xiang, X. Dong, R. Song et al., “V2v4real: A real-world large- scale dataset for vehicle-to-vehicle cooperative perception,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023, pp. 13 712–13 722
work page 2023
-
[36]
Tumtraf v2x cooperative perception dataset,
W. Zimmer, G. A. Wardana, S. Sritharan, X. Zhou, R. Song, and A. C. Knoll, “Tumtraf v2x cooperative perception dataset,” in Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2024, pp. 22 668–22 677
work page 2024
-
[37]
Perception entropy: A metric for multiple sensors configuration evaluation and design,
T. Ma, Z. Liu, and Y. Li, “Perception entropy: A metric for multiple sensors configuration evaluation and design,” arXiv preprint arXiv:2104.06615, 2021
-
[38]
Inves- tigating the impact of multi-lidar placement on object detection for autonomous driving,
H. Hu, Z. Liu, S. Chitlangia, A. Agnihotri, and D. Zhao, “Inves- tigating the impact of multi-lidar placement on object detection for autonomous driving,” in Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2022, pp. 2550–2559
work page 2022
-
[39]
Center-Based 3D Object Detection and Tracking,
T. Yin, X. Zhou, and P. Krahenbuhl, “Center-Based 3D Object Detection and Tracking,” in Proceedings of the IEEE/CVF Con- ference on Computer Vision and Pattern Recognition (CVPR), June 2021, pp. 11 784–11 793
work page 2021
-
[40]
nuScenes: A Multimodal Dataset for Autonomous Driving,
H. Caesar, V. Bankiti, A. H. Lang, S. Vora, V. E. Liong, Q. Xu, A. Krishnan, Y. Pan, G. Baldan, and O. Beijbom, “nuScenes: A Multimodal Dataset for Autonomous Driving,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), June 2020
work page 2020
-
[41]
Multi-camera bev video-surveillance system for efficient monitoring of social distancing,
D. Montero, N. Aranjuelo, P. Leskovsky, E. Loyo, M. Nieto, and N. Aginako, “Multi-camera bev video-surveillance system for efficient monitoring of social distancing,” Multimedia Tools and Applications, vol. 82, no. 22, pp. 34 995–35 019, 2023
work page 2023
-
[42]
Pedestrian movement prediction based on camera vision and deep learning model,
A. M. Herrero, C. Pérez-Benito, D. P. Salido, J. S. Gual, and A. Jevtić, “Pedestrian movement prediction based on camera vision and deep learning model,” in 2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2023, pp. 2233–2238
work page 2023
-
[43]
T. ETSI, “102 863 (v1. 1.1): Intelligent transport systems (ITS); vehicular communications; basic set of applications; local dynamic map (LDM); rationale for and guidance on standardization,” ETSI: Sophia Antipolis, France, 2011
work page 2011
-
[44]
Edge Dynamic Map architecture for C-ITS ap- plications,
M. García, G. Vélez, J. Pérez, Á. Martín, Z. Fernández, and N. Aginako, “Edge Dynamic Map architecture for C-ITS ap- plications,” in 2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC), 2023, pp. 5060– 5065
work page 2023
-
[45]
ISO et al., Road vehicles–vehicle dynamics and road-holding ability–vocabulary
D. ISO et al., Road vehicles–vehicle dynamics and road-holding ability–vocabulary. Beuth Berlin, 2013
work page 2013
-
[46]
The role of gps in precise time and frequency dissemination,
P. H. Dana and B. M. Penrod, “The role of gps in precise time and frequency dissemination,” GPS World, vol. 1, no. 4, pp. 38–43, 1990
work page 1990
-
[47]
The components of cooperative perception-a proposal for future works,
C. Pilz, A. Ulbel, and G. Steinbauer-Wagner, “The components of cooperative perception-a proposal for future works,” in 2021 IEEE International Intelligent Transportation Systems Confer- ence (ITSC). IEEE, 2021, pp. 7–14
work page 2021
-
[48]
A comparative analysis of object detection metrics with a companion open-source toolkit,
R. Padilla, W. L. Passos, T. L. Dias, S. L. Netto, and E. A. Da Silva, “A comparative analysis of object detection metrics with a companion open-source toolkit,” Electronics, vol. 10, no. 3, p. 279, 2021
work page 2021
-
[49]
3d-giou: 3d generalized intersection over union for object detection in point cloud,
J. Xu, Y. Ma, S. He, and J. Zhu, “3d-giou: 3d generalized intersection over union for object detection in point cloud,” Sensors, vol. 19, no. 19, p. 4093, 2019
work page 2019
-
[50]
Simpletrack: Understanding and rethinking 3d multi-object tracking,
Z. Pang, Z. Li, and N. Wang, “Simpletrack: Understanding and rethinking 3d multi-object tracking,” in European Conference on Computer Vision. Springer, 2022, pp. 680–696
work page 2022
-
[51]
Experimental V2X Evaluation for C-V2X and ITS-G5 Technologies in a Real-Life Highway Environment,
V. Maglogiannis, D. Naudts, S. Hadiwardoyo, D. van den Akker, J. Marquez-Barja, and I. Moerman, “Experimental V2X Evaluation for C-V2X and ITS-G5 Technologies in a Real-Life Highway Environment,” IEEE Transactions on Network and Service Management, vol. 19, no. 2, pp. 1521–1538, 2022
work page 2022
-
[52]
Perfor- mance evaluation of deep learning compilers for edge inference,
G. Verma, Y. Gupta, A. M. Malik, and B. Chapman, “Perfor- mance evaluation of deep learning compilers for edge inference,” in 2021 IEEE international parallel and distributed processing symposium workshops (IPDPSW). IEEE, 2021, pp. 858–865
work page 2021
-
[53]
Deep Learning Per- formance Characterization on GPUs for Various Quantization Frameworks,
M. A. Shafique, A. Munir, and J. Kong, “Deep Learning Per- formance Characterization on GPUs for Various Quantization Frameworks,” AI, vol. 4, no. 4, pp. 926–948, 2023. Jon Ander Iñiguez de Gordoa received his M.Sc. degree in Telecommunication Engineer- ing from the University of Navarra, Spain, in
work page 2023
-
[54]
candidate at the Faculty of Informatics at the University of the Basque Country, Spain
He is currently a Ph.D. candidate at the Faculty of Informatics at the University of the Basque Country, Spain. He works as a researcher in the Connected, Cooperative and Automated Systems division in Vicomtech. His research interests include V2X communi- cations, Artificial Intelligence, and simulation applied to the ITS sector. Iker Alkorta obtained his...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.