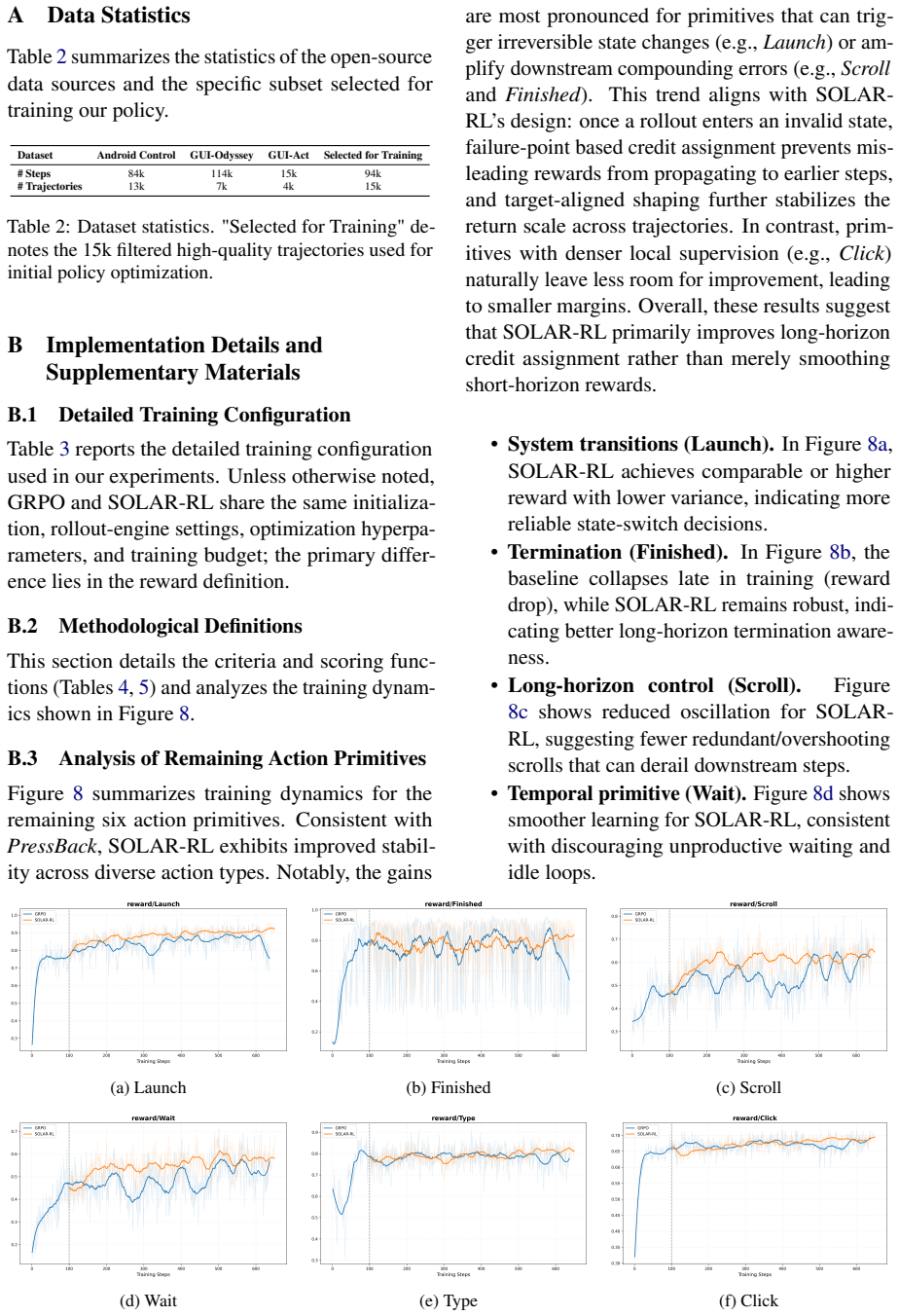
Recognition: unknown
SOLAR-RL: Semi-Online Long-horizon Assignment Reinforcement Learning
Pith reviewed 2026-05-08 12:04 UTC · model grok-4.3
The pith
SOLAR-RL trains GUI agents by turning static data into simulated online trajectories with dense first-failure rewards.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
SOLAR-RL integrates global trajectory semantics into offline learning by reconstructing diverse rollout candidates from static data, detecting the first failure point with per-step validity signals, and retroactively assigning dense step-level rewards through target-aligned shaping that reflects overall execution quality, thereby simulating online feedback at low cost.
What carries the argument
The SOLAR-RL semi-online assignment mechanism: rollout reconstruction from static data combined with first-failure detection and target-aligned dense reward shaping.
If this is right
- Long-horizon task completion rates rise substantially over strong offline and online baselines.
- Robustness to environmental changes and partial observability improves in GUI navigation.
- Training remains sample-efficient because no live interactions are required during learning.
- The same dense reward signals can be applied to other MLLM-based agents facing extended sequences.
Where Pith is reading between the lines
- The first-failure detection idea could transfer to robotics or web-browsing agents where full online trials remain expensive.
- Iterative data augmentation loops become feasible: initial static logs could be expanded with the reconstructed rollouts to bootstrap further improvement.
- The approach invites testing on tasks of increasing length to determine how far the retroactive shaping remains reliable before bias accumulates.
Load-bearing premise
Reconstructing rollouts and assigning rewards via first-failure detection on static data will accurately capture trajectory quality without introducing bias that real online interactions would expose.
What would settle it
Run SOLAR-RL and a true online RL baseline on identical long-horizon GUI tasks, then compare final completion rates and the distribution of failure points; a large mismatch in either metric would show the simulation fails to replicate online dynamics.
Figures








read the original abstract
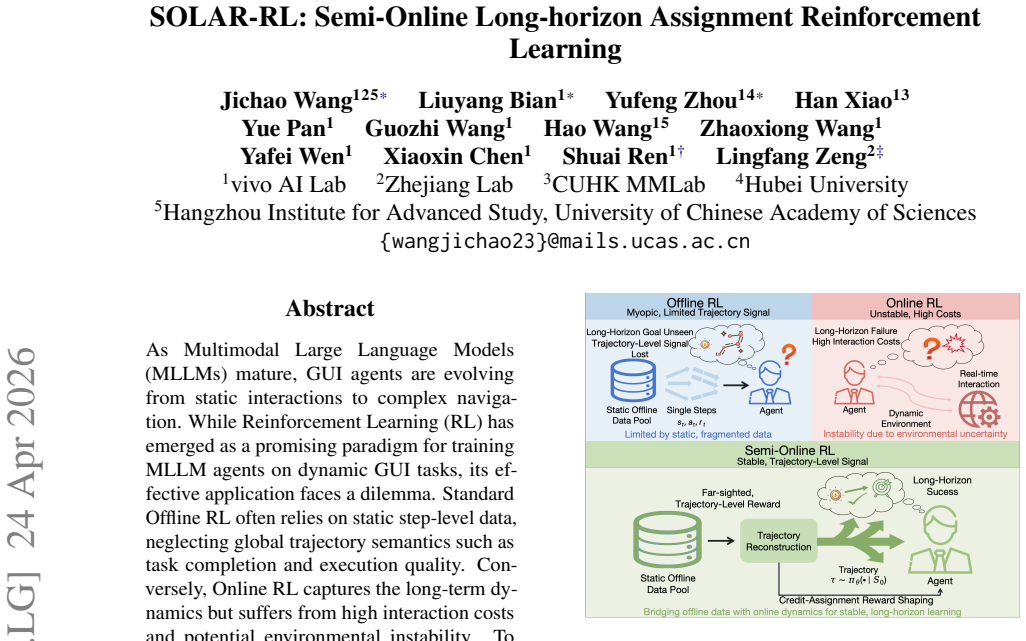
As Multimodal Large Language Models (MLLMs) mature, GUI agents are evolving from static interactions to complex navigation. While Reinforcement Learning (RL) has emerged as a promising paradigm for training MLLM agents on dynamic GUI tasks, its effective application faces a dilemma. Standard Offline RL often relies on static step-level data, neglecting global trajectory semantics such as task completion and execution quality. Conversely, Online RL captures the long-term dynamics but suffers from high interaction costs and potential environmental instability. To bridge this gap, we propose SOLAR-RL (Semi-Online Long-horizon Assignment Reinforcement Learning). Instead of relying solely on expensive online interactions, our framework integrates global trajectory insights directly into the offline learning process. Specifically, we reconstruct diverse rollout candidates from static data, detect the first failure point using per-step validity signals, and retroactively assign dense step-level rewards with target-aligned shaping to reflect trajectory-level execution quality, effectively simulating online feedback without interaction costs. Extensive experiments demonstrate that SOLAR-RL significantly improves long-horizon task completion rates and robustness compared to strong baselines, offering a sample-efficient solution for autonomous GUI navigation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes SOLAR-RL, a semi-online RL framework for MLLM-based GUI agents on long-horizon navigation tasks. It reconstructs diverse rollout candidates from static data, detects first-failure points via per-step validity signals, and retroactively assigns dense step-level rewards using target-aligned shaping to simulate online feedback without actual interactions, claiming this yields significantly higher task completion rates and robustness than strong baselines.
Significance. If the semi-online simulation is shown to produce unbiased reward signals equivalent to live interaction and the reported gains are reproducible, the work could provide a practical, lower-cost bridge between offline and online RL for dynamic GUI environments, improving sample efficiency for autonomous agents.
major comments (2)
- Abstract: the central claim that 'SOLAR-RL significantly improves long-horizon task completion rates and robustness' is unsupported by any quantitative results, baseline names, metrics, or experimental setup details, which is load-bearing for assessing whether the method delivers the stated gains.
- Method (reconstruction and reward assignment paragraph): the assertion that retroactive first-failure detection plus target-aligned shaping on static rollouts 'effectively simulates online feedback' lacks justification or empirical check against true online trajectories; static logs typically omit full state-transition feedback and under-represent rare failure branches, risking systematic bias in the dense rewards that directly supports the sample-efficiency claim.
minor comments (1)
- The abstract introduces the acronym SOLAR-RL without spelling out the full expansion on first use, which reduces immediate readability.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: Abstract: the central claim that 'SOLAR-RL significantly improves long-horizon task completion rates and robustness' is unsupported by any quantitative results, baseline names, metrics, or experimental setup details, which is load-bearing for assessing whether the method delivers the stated gains.
Authors: We agree that the abstract would be strengthened by including specific quantitative results, baseline names, and metrics. In the revised version we will update the abstract to report key experimental outcomes, such as the task completion rates achieved by SOLAR-RL relative to the baselines evaluated and the primary metrics used, drawn directly from the experiments section. revision: yes
-
Referee: Method (reconstruction and reward assignment paragraph): the assertion that retroactive first-failure detection plus target-aligned shaping on static rollouts 'effectively simulates online feedback' lacks justification or empirical check against true online trajectories; static logs typically omit full state-transition feedback and under-represent rare failure branches, risking systematic bias in the dense rewards that directly supports the sample-efficiency claim.
Authors: We acknowledge that the current method description provides limited justification for the simulation claim. We will expand the reconstruction and reward assignment paragraph to explain in greater detail how per-step validity signals combined with target-aligned shaping on reconstructed diverse rollouts approximate online feedback, and how this reconstruction step is intended to mitigate under-representation of failure branches. We will also add an explicit discussion of assumptions and potential biases. A full side-by-side empirical check against live online trajectories is not present in the current work. revision: partial
- Direct empirical comparison of the assigned dense rewards to rewards obtained from true online trajectories, as such a comparison would require the very online interactions the semi-online framework is designed to avoid.
Circularity Check
No circularity: algorithmic proposal with no self-referential derivations or fitted predictions.
full rationale
The paper presents SOLAR-RL as a framework that reconstructs rollouts from static data, detects first-failure points via validity signals, and applies target-aligned reward shaping to simulate online feedback. No equations, uniqueness theorems, or self-citations are invoked in the provided text to derive the method; the central claim is an empirical integration of offline and simulated-online elements whose validity rests on experimental outcomes rather than definitional reduction. The approach does not rename known results or smuggle ansatzes via prior self-work, leaving the derivation chain self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Static step-level data contains sufficient information to reconstruct meaningful long-horizon rollouts
- domain assumption Per-step validity signals reliably indicate the first failure point in a trajectory
Reference graph
Works this paper leans on
-
[1]
Hao Bai, Yifei Zhou, Jiayi Pan, Mert Cemri, Alane Suhr, Sergey Levine, and Aviral Kumar. 2024. Digirl: Training in-the-wild device-control agents with autonomous reinforcement learning. Advances in Neural Information Processing Systems, 37:12461--12495
2024
-
[2]
Shuai Bai, Keqin Chen, Xuejing Liu, Jialin Wang, Wenbin Ge, Sibo Song, Kai Dang, Peng Wang, Shijie Wang, Jun Tang, and 1 others. 2025. Qwen2. 5-vl technical report. arXiv preprint arXiv:2502.13923
work page internal anchor Pith review arXiv 2025
- [3]
- [4]
-
[5]
Wenyi Hong, Weihan Wang, Qingsong Lv, Jiazheng Xu, Wenmeng Yu, Junhui Ji, Yan Wang, Zihan Wang, Yuxiao Dong, Ming Ding, and 1 others. 2024. Cogagent: A visual language model for gui agents. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 14281--14290
2024
-
[6]
Wenyi Hong, Wenmeng Yu, Xiaotao Gu, Guo Wang, Guobing Gan, Haomiao Tang, Jiale Cheng, Ji Qi, Junhui Ji, Lihang Pan, and 1 others. 2025 b . Glm-4.1 v-thinking: Towards versatile multimodal reasoning with scalable reinforcement learning. arXiv preprint arXiv:2507.01006
work page internal anchor Pith review arXiv 2025
-
[7]
Sergey Levine, Aviral Kumar, George Tucker, and Justin Fu. 2020. Offline reinforcement learning: Tutorial, review, and perspectives on open problems. arXiv preprint arXiv:2005.01643
work page internal anchor Pith review arXiv 2020
-
[8]
Wei Li, William Bishop, Alice Li, Chris Rawles, Folawiyo Campbell-Ajala, Divya Tyamagundlu, and Oriana Riva. 2024. On the effects of data scale on computer control agents. arXiv e-prints, pages arXiv--2406
2024
- [9]
-
[10]
Quanfeng Lu, Wenqi Shao, Zitao Liu, Lingxiao Du, Fanqing Meng, Boxuan Li, Botong Chen, Siyuan Huang, Kaipeng Zhang, and Ping Luo. 2025 a . Guiodyssey: A comprehensive dataset for cross-app gui navigation on mobile devices. In Proceedings of the IEEE/CVF International Conference on Computer Vision, pages 22404--22414
2025
- [11]
-
[12]
Yujia Qin, Yining Ye, Junjie Fang, Haoming Wang, Shihao Liang, Shizuo Tian, Junda Zhang, Jiahao Li, Yunxin Li, Shijue Huang, and 1 others. 2025. Ui-tars: Pioneering automated gui interaction with native agents. arXiv preprint arXiv:2501.12326
work page internal anchor Pith review arXiv 2025
-
[13]
Christopher Rawles, Sarah Clinckemaillie, Yifan Chang, Jonathan Waltz, Gabrielle Lau, Marybeth Fair, Alice Li, William Bishop, Wei Li, Folawiyo Campbell-Ajala, and 1 others. 2024. Androidworld: A dynamic benchmarking environment for autonomous agents. arXiv preprint arXiv:2405.14573
work page internal anchor Pith review arXiv 2024
-
[14]
Christopher Rawles, Alice Li, Daniel Rodriguez, Oriana Riva, and Timothy Lillicrap. 2023. Androidinthewild: A large-scale dataset for android device control. Advances in Neural Information Processing Systems, 36:59708--59728
2023
-
[15]
St \'e phane Ross, Geoffrey Gordon, and Drew Bagnell. 2011. A reduction of imitation learning and structured prediction to no-regret online learning. In Proceedings of the fourteenth international conference on artificial intelligence and statistics, pages 627--635. JMLR Workshop and Conference Proceedings
2011
-
[16]
Zhihong Shao, Peiyi Wang, Qihao Zhu, Runxin Xu, Junxiao Song, Xiao Bi, Haowei Zhang, Mingchuan Zhang, YK Li, Yang Wu, and 1 others. 2024. Deepseekmath: Pushing the limits of mathematical reasoning in open language models. arXiv preprint arXiv:2402.03300
work page internal anchor Pith review arXiv 2024
- [17]
-
[18]
Hao Wang, Guozhi Wang, Han Xiao, Yufeng Zhou, Yue Pan, Jichao Wang, Ke Xu, Yafei Wen, Xiaohu Ruan, Xiaoxin Chen, and 1 others. 2026. Skill-sd: Skill-conditioned self-distillation for multi-turn llm agents. arXiv preprint arXiv:2604.10674
work page internal anchor Pith review Pith/arXiv arXiv 2026
- [19]
- [20]
- [21]
-
[22]
Tianbao Xie, Danyang Zhang, Jixuan Chen, Xiaochuan Li, Siheng Zhao, Ruisheng Cao, Toh J Hua, Zhoujun Cheng, Dongchan Shin, Fangyu Lei, and 1 others. 2024. Osworld: Benchmarking multimodal agents for open-ended tasks in real computer environments. Advances in Neural Information Processing Systems, 37:52040--52094
2024
- [23]
- [24]
- [25]
-
[26]
online" 'onlinestring :=
ENTRY address archivePrefix author booktitle chapter edition editor eid eprint eprinttype howpublished institution journal key month note number organization pages publisher school series title type volume year doi pubmed url lastchecked label extra.label sort.label short.list INTEGERS output.state before.all mid.sentence after.sentence after.block STRING...
-
[27]
write newline
" write newline "" before.all 'output.state := FUNCTION n.dashify 't := "" t empty not t #1 #1 substring "-" = t #1 #2 substring "--" = not "--" * t #2 global.max substring 't := t #1 #1 substring "-" = "-" * t #2 global.max substring 't := while if t #1 #1 substring * t #2 global.max substring 't := if while FUNCTION word.in bbl.in capitalize " " * FUNCT...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.