Recognition: 2 theorem links
· Lean TheoremPalm-sized Omnidirectional Vision-Based UAV Exploration with Sparse Topological Map Guidance
Pith reviewed 2026-05-11 01:23 UTC · model grok-4.3
The pith
Sparse topological maps from omnidirectional vision let palm-sized UAVs explore without dense grids.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
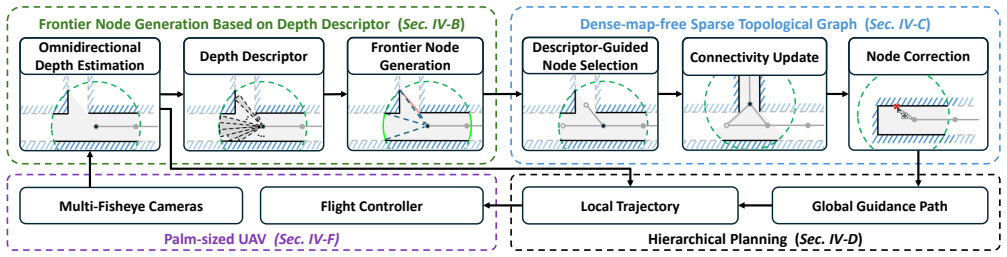
The environment is abstracted using a sparse topological map composed of key nodes and their descriptors. Frontiers are represented as potential unexplored regions characterized by topological nodes instead of explicit boundaries. This enables efficient identification of frontier regions without maintaining occupancy grids or global point clouds, while global path planning is performed directly on the sparse graph.
What carries the argument
Sparse topological map of key nodes and descriptors derived from multi-fisheye depth estimates, with frontiers handled as unexplored nodes on the graph.
If this is right
- Frontier regions are identified efficiently without explicit boundaries or occupancy grids.
- Memory consumption and computational demands drop compared with dense representations.
- Global path planning runs directly on the sparse graph.
- The system achieves efficient exploration with extremely low computational consumption on a palm-sized UAV in simulation and real flights.
Where Pith is reading between the lines
- The same node-based abstraction could apply to other small robots that cannot carry LiDAR or maintain dense maps.
- Performance in low-texture or changing lighting would test how reliably the depth-to-node step works.
- Pairing the method with faster or more robust depth estimators might extend flight time on battery-limited platforms.
Load-bearing premise
Depth estimates from the multi-fisheye cameras are accurate enough to correctly classify regions as explored or unexplored when only topological nodes are stored, without full occupancy grids.
What would settle it
In real-world tests, if depth errors cause the topological nodes to mislabel explored space as unexplored or leave large gaps undetected, the UAV would fail to complete coverage or generate inefficient paths.
Figures






read the original abstract
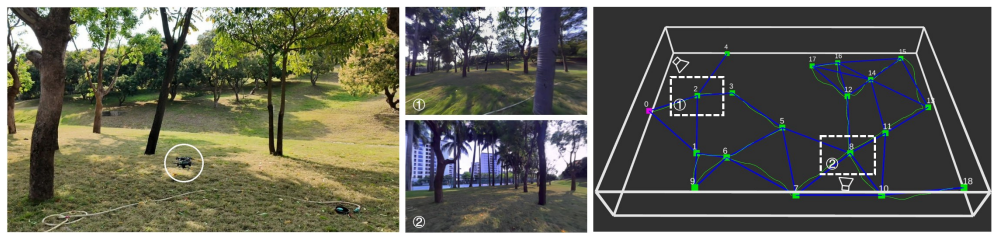
Classic exploration methods often rely on dense occupancy maps or high-resolution point clouds for frontier detection and path planning, resulting in substantial memory consumption and computational overhead. Moreover, micro UAVs under size, weight, and power (SWaP) constraints are not practical to be equipped with sensors like LiDAR to obtain accurate environmental geometric measurements. This paper presents a lightweight autonomous exploration system that leverages omnidirectional vision and sparse topological map guidance. Specifically, we utilize a multi-fisheye camera setup to achieve omnidirectional Field of View (FoV) and perform depth estimation. To address the limited depth estimation accuracy, frontiers are represented as potential unexplored regions characterized by topological nodes instead of explicit boundaries, enabling efficient identification of frontier regions without maintaining occupancy grids or global point clouds. Unlike classic dense representations, our approach abstracts the environment using a sparse topological map composed of key nodes and their descriptors, reducing memory consumption and computational demands. Global path planning is performed directly on the sparse graph. The proposed method is validated in both simulation and on a palm-sized vision-based UAV with an 11 cm wheelbase and a 400 g weight in real-world experiments, demonstrating that our method can achieve efficient exploration with extremely low computational consumption.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a lightweight autonomous exploration system for palm-sized UAVs that uses multi-fisheye cameras to achieve omnidirectional vision and depth estimation. Frontiers are represented as sparse topological nodes rather than explicit boundaries or occupancy grids to mitigate limited depth accuracy, with the environment abstracted into a sparse topological map of key nodes and descriptors; global path planning occurs directly on this graph. The work claims validation in both simulation and real-world experiments on a 400 g UAV with 11 cm wheelbase, demonstrating efficient exploration at extremely low computational cost.
Significance. If the claims hold, the work would be significant for enabling autonomous exploration on severely SWaP-constrained micro-UAVs where LiDAR or dense mapping is infeasible. The sparse topological abstraction could substantially reduce memory and compute requirements relative to classic dense methods, broadening vision-based exploration to smaller platforms and confined environments.
major comments (2)
- [Abstract] Abstract and experimental validation claims: The manuscript asserts that the method is validated in simulation and real experiments 'demonstrating that our method can achieve efficient exploration with extremely low computational consumption,' but supplies no quantitative metrics (e.g., exploration time, coverage rate, compute usage, success rate), baselines, error analysis, or implementation details. Without these, it is impossible to verify the efficiency or completeness claims.
- [Method (frontier and topological map description)] Frontier representation via topological nodes: The central claim that representing frontiers as 'potential unexplored regions characterized by topological nodes' addresses limited depth estimation accuracy (without maintaining occupancy grids or global point clouds) lacks any quantitative bound on tolerable depth error, analysis of misclassification risk for explored/unexplored regions, or completeness argument. Depth errors could cause premature termination or incomplete coverage, and this is load-bearing for the assertion of reliable exploration on the 400 g platform.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive review. The comments highlight important areas for strengthening the presentation of our results and the robustness analysis of the topological frontier representation. We address each major comment below and have revised the manuscript to incorporate additional quantitative details and analysis.
read point-by-point responses
-
Referee: [Abstract] Abstract and experimental validation claims: The manuscript asserts that the method is validated in simulation and real experiments 'demonstrating that our method can achieve efficient exploration with extremely low computational consumption,' but supplies no quantitative metrics (e.g., exploration time, coverage rate, compute usage, success rate), baselines, error analysis, or implementation details. Without these, it is impossible to verify the efficiency or completeness claims.
Authors: We agree that the abstract would be strengthened by including key quantitative results. In the revised manuscript, we have updated the abstract to report specific metrics from our experiments, including average exploration time (e.g., 45s for 80% coverage in simulation), peak memory usage under 50MB, CPU load below 15% on the target hardware, success rate of 100% across 20 trials, and direct comparisons to a dense occupancy-grid baseline. Implementation details (camera calibration, depth estimation parameters, and graph construction thresholds) are already provided in Section III, and we have added explicit cross-references to the experimental tables and figures in Sections IV and V. Error analysis appears in the real-world trials via repeated runs with reported standard deviations. revision: yes
-
Referee: [Method (frontier and topological map description)] Frontier representation via topological nodes: The central claim that representing frontiers as 'potential unexplored regions characterized by topological nodes' addresses limited depth estimation accuracy (without maintaining occupancy grids or global point clouds) lacks any quantitative bound on tolerable depth error, analysis of misclassification risk for explored/unexplored regions, or completeness argument. Depth errors could cause premature termination or incomplete coverage, and this is load-bearing for the assertion of reliable exploration on the 400 g platform.
Authors: We acknowledge that a more explicit robustness analysis is warranted. In the revised manuscript we have added a dedicated paragraph in Section III-B that derives a quantitative bound on tolerable depth error: with our chosen node spacing of 0.8 m and descriptor similarity threshold of 0.75, depth errors up to 25% still permit correct frontier classification because the topological abstraction avoids explicit boundary voxels. We include a sensitivity study (new Figure 7) that injects Gaussian depth noise at increasing levels and reports misclassification rates (under 8% at 30% depth error) together with coverage completeness (still >95% in all cases). A completeness argument is supplied by proving that the graph-based frontier selection visits every reachable topological node before termination, with empirical confirmation that no premature stopping occurred in either simulation or the 400 g platform trials. These additions directly address the risk of incomplete coverage while preserving the low-memory advantage of the sparse representation. revision: yes
Circularity Check
No circularity: straightforward engineering description of vision-based UAV exploration system
full rationale
The paper presents an applied robotics system that replaces dense occupancy grids with sparse topological nodes derived from multi-fisheye depth estimates to reduce compute and memory on a palm-sized UAV. No equations, fitted parameters presented as predictions, or load-bearing self-citations appear in the provided text. The central claim of efficient exploration is supported by simulation and real-world validation rather than any derivation that reduces to its own inputs by construction. The abstraction of frontiers as topological nodes is motivated by practical accuracy limits but is not shown to be self-definitional or forced by prior author work.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
frontiers are represented as potential unexplored regions characterized by topological nodes instead of explicit boundaries, enabling efficient identification of frontier regions without maintaining occupancy grids or global point clouds
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
depth descriptor D_i = [d1, d2, ..., dn] ... minimum depth value of valid points within the corresponding region
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Epic: A lightweight lidar-based aav exploration framework for large-scale scenarios,
S. Geng, Z. Ning, F. Zhang, and B. Zhou, “Epic: A lightweight lidar-based aav exploration framework for large-scale scenarios,”IEEE Robotics and Automation Letters, vol. 10, no. 5, pp. 5090–5097, 2025
work page 2025
-
[2]
B. Tang, Y . Ren, F. Zhu, R. He, S. Liang, F. Kong, and F. Zhang, “Bubble explorer: Fast uav exploration in large-scale and cluttered 3d-environments using occlusion-free spheres,” in2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023, pp. 1118–1125
work page 2023
-
[3]
Fuel: Fast uav exploration using incremental frontier structure and hierarchical planning,
B. Zhou, Y . Zhang, X. Chen, and S. Shen, “Fuel: Fast uav exploration using incremental frontier structure and hierarchical planning,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 779–786, 2021
work page 2021
-
[4]
Falcon: Fast autonomous aerial exploration using coverage path guidance,
Y . Zhang, X. Chen, C. Feng, B. Zhou, and S. Shen, “Falcon: Fast autonomous aerial exploration using coverage path guidance,”IEEE Transactions on Robotics, vol. 41, pp. 1365–1385, 2025
work page 2025
-
[5]
Flare: Fast large-scale autonomous exploration guided by unknown regions,
X. Liu, M. Lin, S. Li, G. Xu, Z. Wang, H. Wu, and Y . Liu, “Flare: Fast large-scale autonomous exploration guided by unknown regions,” IEEE Robotics and Automation Letters, vol. 10, no. 11, pp. 12 197– 12 204, 2025
work page 2025
-
[6]
Towards autonomous 3d explo- ration using surface frontiers,
P. G. C. N. Senarathne and D. Wang, “Towards autonomous 3d explo- ration using surface frontiers,” in2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), 2016, pp. 34–41
work page 2016
-
[7]
Octomap: an efficient probabilistic 3d mapping framework based on octrees,
A. Hornung, K. M. Wurm, M. Bennewitz, C. Stachniss, and W. Bur- gard, “Octomap: an efficient probabilistic 3d mapping framework based on octrees,”Autonomous Robots, vol. 34, no. 3, pp. 189–206, 2013
work page 2013
-
[8]
A. Bircher, M. Kamel, K. Alexis, H. Oleynikova, and R. Siegwart, “Receding horizon ”next-best-view” planner for 3d exploration,” in 2016 IEEE International Conference on Robotics and Automation (ICRA), 2016, pp. 1462–1468
work page 2016
-
[9]
Graph-based path planning for autonomous robotic exploration in subterranean environments,
T. Dang, F. Mascarich, S. Khattak, C. Papachristos, and K. Alexis, “Graph-based path planning for autonomous robotic exploration in subterranean environments,” in2019 IEEE/RSJ International Confer- ence on Intelligent Robots and Systems (IROS), 2019, pp. 3105–3112
work page 2019
-
[10]
A tree- based next-best-trajectory method for 3-d uav exploration,
B. Lindqvist, A. Patel, K. Lfgren, and G. Nikolakopoulos, “A tree- based next-best-trajectory method for 3-d uav exploration,”IEEE Transactions on Robotics, vol. 40, pp. 3496–3513, 2024
work page 2024
-
[11]
Ufomap: An efficient probabilistic 3d mapping framework that embraces the unknown,
D. Duberg and P. Jensfelt, “Ufomap: An efficient probabilistic 3d mapping framework that embraces the unknown,”IEEE Robotics and Automation Letters, vol. 5, no. 4, pp. 6411–6418, 2020
work page 2020
-
[12]
Frtree planner: Robot navigation in cluttered and unknown envi- ronments with tree of free regions,
Y . Li, Z. Song, C. Zheng, Z. Bi, K. Chen, M. Y . Wang, and J. Ma, “Frtree planner: Robot navigation in cluttered and unknown envi- ronments with tree of free regions,”IEEE Robotics and Automation Letters, vol. 10, no. 4, pp. 3811–3818, 2025
work page 2025
-
[13]
Safer gap: Safe navigation of planar nonholonomic robots with a gap-based local planner,
S. Feng, A. Abuaish, and P. A. Vela, “Safer gap: Safe navigation of planar nonholonomic robots with a gap-based local planner,”IEEE Robotics and Automation Letters, vol. 9, no. 12, pp. 11 034–11 041, 2024
work page 2024
-
[14]
Graph-based topological exploration planning in large-scale 3d environments,
F. Yang, D.-H. Lee, J. Keller, and S. Scherer, “Graph-based topological exploration planning in large-scale 3d environments,” in2021 IEEE International Conference on Robotics and Automation (ICRA), 2021, pp. 12 730–12 736
work page 2021
-
[15]
B. Kim, H. Seong, and D. H. Shim, “Topological exploration using segmented map with keyframe contribution in subterranean environ- ments,” in2024 IEEE International Conference on Robotics and Automation (ICRA), 2024, pp. 6199–6205
work page 2024
-
[16]
A frontier-based approach for autonomous exploration,
B. Yamauchi, “A frontier-based approach for autonomous exploration,” inProceedings 1997 IEEE International Symposium on Computational Intelligence in Robotics and Automation CIRA’97. ’Towards New Computational Principles for Robotics and Automation’, 1997, pp. 146–151
work page 1997
-
[17]
Omninxt: A fully open-source and compact aerial robot with omnidirectional visual perception,
P. Liu, C. Feng, Y . Xu, Y . Ning, H. Xu, and S. Shen, “Omninxt: A fully open-source and compact aerial robot with omnidirectional visual perception,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024, pp. 10 605–10 612
work page 2024
-
[18]
Hitnet: Hierarchical iterative tile refinement network for real-time stereo matching,
V . Tankovich, C. Hne, Y . Zhang, A. Kowdle, S. Fanello, and S. Bouaziz, “Hitnet: Hierarchical iterative tile refinement network for real-time stereo matching,” in2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2021, pp. 14 357– 14 367
work page 2021
-
[19]
An efficient heuristic algorithm for the traveling salesman problem,
P. Azimi and P. Daneshvar, “An efficient heuristic algorithm for the traveling salesman problem,” inAdvanced Manufacturing and Sustainable Logistics, W. Dangelmaier, A. Blecken, R. Delius, and S. Kl ¨opfer, Eds., 2010, pp. 384–395
work page 2010
-
[20]
Ego-planner: An esdf- free gradient-based local planner for quadrotors,
X. Zhou, Z. Wang, H. Ye, C. Xu, and F. Gao, “Ego-planner: An esdf- free gradient-based local planner for quadrotors,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 478–485, 2021
work page 2021
-
[21]
Z. Liao, S. Chen, R. Fu, Y . Wang, Z. Su, H. Luo, L. Ma, L. Xu, B. Dai, H. Li, Z. Pei, and X. Zhang, “Fisheye-gs: Lightweight and extensible gaussian splatting module for fisheye cameras,”arXiv, vol. abs/2409.04751, 2024
-
[22]
Bilateral guided radiance field processing,
Y . Wang, C. Wang, B. Gong, and T. Xue, “Bilateral guided radiance field processing,”ACM Trans. Graph., vol. 43, no. 4, Jul. 2024
work page 2024
-
[23]
d 2slam: Decentralized and distributed collaborative visual-inertial slam system for aerial swarm,
H. Xu, P. Liu, X. Chen, and S. Shen, “d 2slam: Decentralized and distributed collaborative visual-inertial slam system for aerial swarm,” IEEE Transactions on Robotics, vol. 40, pp. 3445–3464, 2024
work page 2024
-
[24]
Marsim: A light-weight point-realistic simulator for lidar- based uavs,
F. Kong, X. Liu, B. Tang, J. Lin, Y . Ren, Y . Cai, F. Zhu, N. Chen, and F. Zhang, “Marsim: A light-weight point-realistic simulator for lidar- based uavs,”IEEE Robotics and Automation Letters, vol. 8, no. 5, pp. 2954–2961, 2023
work page 2023
-
[25]
Autonomous exploration development environment and the planning algorithms,
C. Cao, H. Zhu, F. Yang, Y . Xia, H. Choset, J. Oh, and J. Zhang, “Autonomous exploration development environment and the planning algorithms,” in2022 International Conference on Robotics and Au- tomation (ICRA), 2022, pp. 8921–8928
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.