Recognition: 2 theorem links
· Lean TheoremDecentralized Contingency MPC based on Safe Sets for Nonlinear Multi-agent Collision Avoidance
Pith reviewed 2026-05-12 03:51 UTC · model grok-4.3
The pith
A decentralized contingency MPC with safe sets guarantees recursive feasibility and collision avoidance for nonlinear multi-agent systems under state-only information.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The decentralized contingency MPC scheme based on safe sets guarantees recursive feasibility, including collision avoidance, and establishes a Lyapunov-type convergence result to an admissible safe equilibrium for nonlinear multi-agent systems operating under a state-only information pattern.
What carries the argument
The geometric and decentralized safe-set update mechanism that couples with contingency certificates in each agent's local optimization to maintain feasible backup maneuvers.
If this is right
- Collision avoidance holds across time steps even when agents enter or leave the group.
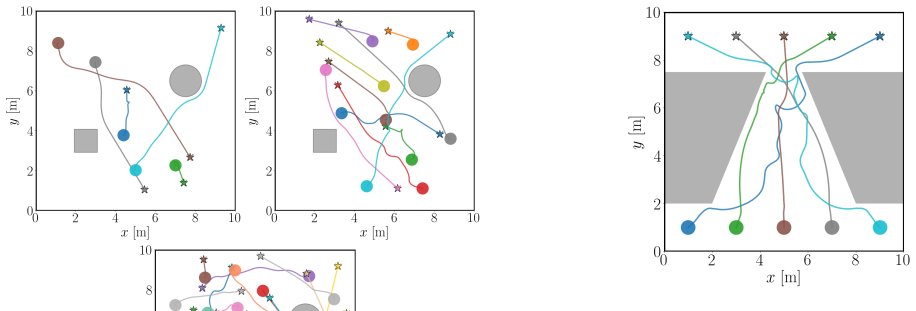
- The same rule set produces safe motion in both sparse and bottleneck environments without trajectory sharing.
- Lyapunov-type analysis shows convergence to an admissible safe equilibrium under the decentralized updates.
- Recursive feasibility is retained by the safe-set mechanism between consecutive optimization steps.
Where Pith is reading between the lines
- The method could be tested for robustness when state observations contain noise or delays.
- It opens a route to combine the safe-set construction with online adaptation for time-varying environments.
- The guarantees suggest applicability to other multi-agent tasks requiring backup plans, such as coordinated transport.
- Performance scaling could be examined by increasing agent count beyond the reported simulations.
Load-bearing premise
Agents can compute and update safe sets in a decentralized manner while preserving the properties required for the contingency certificates, and the nonlinear dynamics admit feasible backup maneuvers from state information alone.
What would settle it
A counter-example in which safe-set updates are applied yet recursive feasibility is lost or a collision occurs in a dense multi-agent scenario with the given nonlinear dynamics would falsify the guarantees.
Figures






read the original abstract
Decentralized collision avoidance remains challenging, particularly when agents do not communicate any information related to planned trajectories. Most existing approaches either rely on conservative coordination mechanisms or provide limited guarantees on recursive feasibility and convergence. This paper develops a decentralized contingency MPC framework for multi-agent systems with nonlinear dynamics that achieves collision-free motion under a state-only information pattern. Each agent follows the same consensual rule set, enabling safe decentralized planning without communication. Each agent solves a local optimization problem that couples a nominal trajectory with a contingency certificate ensuring a feasible backup maneuver under receding-horizon operation. A novel geometric and decentralized safe-set update mechanism prevents feasibility loss between consecutive time steps. The resulting scheme guarantees recursive feasibility, including collision avoidance, and establishes a Lyapunov-type convergence result to an admissible safe equilibrium. Simulation results demonstrate performance in both sparse and dense multi-agent environments, including cluttered bottleneck scenarios and under plug-and-play operation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a decentralized contingency MPC scheme for nonlinear multi-agent collision avoidance under a state-only information pattern. Each agent solves a local optimization coupling a nominal trajectory with a contingency certificate for a feasible backup maneuver; a novel geometric decentralized safe-set update is introduced to maintain feasibility across receding-horizon steps. The central claims are recursive feasibility (including collision avoidance) and a Lyapunov-type convergence result to an admissible safe equilibrium, supported by simulations in sparse, dense, and bottleneck scenarios with plug-and-play operation.
Significance. If the recursive-feasibility and convergence guarantees can be established rigorously for nonlinear dynamics, the work would represent a meaningful advance in communication-free multi-agent control. The combination of contingency certificates with a geometric safe-set update offers a concrete mechanism that could reduce conservatism relative to purely reactive or fully centralized approaches, and the plug-and-play simulation results suggest practical relevance for robotics applications.
major comments (2)
- [Section 4 (safe-set update mechanism) and proof of recursive feasibility] The recursive feasibility guarantee (abstract and the main theorem on feasibility) rests on the claim that the decentralized geometric safe-set update preserves a feasible backup maneuver for nonlinear dynamics using only observed states. However, the construction does not appear to explicitly compute or over-approximate the reachable set under the nonlinear vector field between updates; without this, small state perturbations in dense or bottleneck configurations can eliminate the contingency certificate, violating the invariance property required for recursive feasibility.
- [Theorem on convergence / Section 5] The Lyapunov-type convergence result assumes the existence of an admissible safe equilibrium that remains reachable under the consensual decentralized rule set. For nonlinear dynamics, the proof sketch does not address how the state-only information pattern and the geometric update together guarantee that the equilibrium set is non-empty and invariant when agents enter or leave the formation (plug-and-play).
minor comments (2)
- [Section 3] Notation for the contingency certificate and the safe-set update should be introduced with explicit definitions of all sets and operators before their first use in the algorithm description.
- [Section 6] Simulation figures would benefit from explicit reporting of the number of Monte-Carlo runs, the distribution of initial conditions, and quantitative metrics (e.g., minimum inter-agent distance over time) rather than qualitative descriptions of “dense” and “bottleneck” scenarios.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. The comments highlight important aspects of the recursive feasibility and convergence proofs for nonlinear systems, which we will address in the revision to strengthen the rigor of our claims.
read point-by-point responses
-
Referee: [Section 4 (safe-set update mechanism) and proof of recursive feasibility] The recursive feasibility guarantee (abstract and the main theorem on feasibility) rests on the claim that the decentralized geometric safe-set update preserves a feasible backup maneuver for nonlinear dynamics using only observed states. However, the construction does not appear to explicitly compute or over-approximate the reachable set under the nonlinear vector field between updates; without this, small state perturbations in dense or bottleneck configurations can eliminate the contingency certificate, violating the invariance property required for recursive feasibility.
Authors: We are grateful for this detailed observation. Our geometric safe-set update is constructed to ensure that the contingency certificate remains feasible by updating the safe sets based on observed states in a decentralized manner that accounts for the nonlinear dynamics through conservative geometric operations. However, we acknowledge that the current manuscript does not explicitly include an over-approximation of the reachable set. To address this, we will revise Section 4 to include a new lemma that derives a reachable set over-approximation using the local Lipschitz constant of the vector field and the geometry of the safe sets. This will demonstrate that the update preserves the invariance property even under small perturbations, particularly in dense and bottleneck scenarios. We believe this addition will clarify the proof. revision: partial
-
Referee: [Theorem on convergence / Section 5] The Lyapunov-type convergence result assumes the existence of an admissible safe equilibrium that remains reachable under the consensual decentralized rule set. For nonlinear dynamics, the proof sketch does not address how the state-only information pattern and the geometric update together guarantee that the equilibrium set is non-empty and invariant when agents enter or leave the formation (plug-and-play).
Authors: Thank you for this comment. The convergence result relies on the existence of an admissible safe equilibrium, which is guaranteed by the initial feasibility and the properties of the safe sets. Regarding plug-and-play, the geometric update and consensual rules are intended to maintain the non-emptiness of the equilibrium set by allowing agents to adjust their safe sets upon detecting new or departing agents via state observations. Nevertheless, we agree that the current proof sketch is brief on this point for nonlinear dynamics. In the revised manuscript, we will expand Section 5 with a detailed proof of invariance of the equilibrium set under plug-and-play, showing that the state-only information and geometric updates ensure the set remains non-empty and that the Lyapunov function continues to decrease towards it. revision: yes
Circularity Check
Derivation chain is self-contained with no circular reductions
full rationale
The paper derives recursive feasibility (including collision avoidance) and Lyapunov-type convergence from the proposed decentralized geometric safe-set update mechanism applied to contingency MPC. This construction is presented as novel and is used to establish the invariance and feasibility properties between receding-horizon steps. No steps reduce by construction to fitted parameters renamed as predictions, self-definitional loops, or load-bearing self-citations whose validity depends on the current result. The framework builds on standard MPC and safe-set concepts but the central guarantees follow from the explicit update rule and certificate structure without circularity.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Nonlinear dynamics of agents allow for feasible contingency maneuvers
- ad hoc to paper Safe sets can be updated in a decentralized geometric manner without losing feasibility
invented entities (2)
-
Contingency certificate
no independent evidence
-
Decentralized safe-set update mechanism
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
novel geometric and decentralized safe-set update mechanism prevents feasibility loss... FoS update rule... pairwise disjointness of the active safe sets
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Lyapunov-type convergence result... Jc_i(t) ≤ Ĵc_i(t) ... shifted-tail bound
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Alsterda, Matthew Brown, and J
John P. Alsterda, Matthew Brown, and J. Christian Gerdes. Contingency model predictive control for automated vehicles. InProceedings of the American Control Conference, 2019
work page 2019
-
[2]
Control Barrier Functions: Theory and Applications
Aaron D. Ames, Samuel Coogan, Magnus Egerstedt, Gennaro Notomista, Koushil Sreenath, and Paulo Tabuada. Control barrier functions: Theory and applications. arXiv preprint arXiv:1903.11199, 2019
work page Pith review arXiv 1903
-
[3]
Giuseppe Belgioioso, Dominic Liao-McPherson, Mathias Hudoba de Badyn, Nicolas Pelzmann, John Lygeros, and Florian D¨ orfler. Stability and robustness of distributed suboptimal model predictive control.IF AC-PapersOnLine, 56(2):5115–5120, 2023. 22nd IFAC World Congress
work page 2023
-
[4]
H. Chen and F. Allg¨ ower. A quasi-infinite horizon nonlinear model predictive control scheme with guaranteed stability. Automatica, 34(10):1205–1217, 1998
work page 1998
-
[5]
Paolo Fiorini and Zvi Shiller. Motion planning in dynamic environments using velocity obstacles.The International Journal of Robotics Research, 17(7):760–772, 1998
work page 1998
-
[6]
Michael Hoy, Alexey S. Matveev, and Andrey V. Savkin. Collision free cooperative navigation of multiple wheeled robots in unknown cluttered environments.Robotics and Autonomous Systems, 60(10):1253–1266, 2012
work page 2012
-
[7]
Yuning Jiang, Philipp Sauerteig, Boris Houska, and Karl Worthmann. Distributed optimization using aladin for mpc in smart grids.IEEE Transactions on Control Systems Technology, 29(5):2142–2152, 2021
work page 2021
-
[8]
M¨ uller, and Frank Allg¨ ower
Johannes K¨ ohler, Matthias A. M¨ uller, and Frank Allg¨ ower. Distributed model predictive control—recursive feasibility under inexact dual optimization.Automatica, 102:1–9, 2019
work page 2019
-
[9]
Amir Salimi Lafmejani and Spring Berman. Nonlinear MPC for collision-free and deadlock-free navigation of multiple nonholonomic mobile robots.Robotics and Autonomous Systems, 141:103774, 2021
work page 2021
-
[10]
Merry-go-round: Safe control of decentralized multi-robot systems with deadlock prevention
Wonjong Lee, Joonyeol Sim, Joonkyung Kim, Siwon Jo, Wenhao Luo, and Changjoo Nam. Merry-go-round: Safe control of decentralized multi-robot systems with deadlock prevention. In2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 4589–4595, 2025
work page 2025
-
[11]
Sergio Lucia, Markus K¨ ogel, and Rolf Findeisen. Contract- based predictive control of distributed systems with plug and play capabilities.IF AC-PapersOnLine, 48(23):205–211,
-
[12]
5th IFAC Conference on Nonlinear Model Predictive Control NMPC 2015
work page 2015
-
[13]
Bookmundo Direct (Edition MoRa), 2 edition, 2022
Jan Lunze.Networked Control of Multi-Agent Systems. Bookmundo Direct (Edition MoRa), 2 edition, 2022
work page 2022
-
[14]
J.M. Maestre, D. Mu˜ noz de la Pe˜ na, E.F. Camacho, and T. Alamo. Distributed model predictive control based on agent negotiation.Journal of Process Control, 21(5):685–697,
-
[15]
Special Issue on Hierarchical and Distributed Model Predictive Control
-
[16]
David Q. Mayne, James B. Rawlings, Christopher V. Rao, and Pierre O. M. Scokaert. Constrained model predictive control: Stability and optimality.Automatica, 36(6):789–814, 2000
work page 2000
-
[17]
Negenborn, Bart De Schutter, and Jacob Hellendoorn
Rudy R. Negenborn, Bart De Schutter, and Jacob Hellendoorn. Multi-agent model predictive control: A survey. arXiv preprint arXiv:0908.1076, 2009
-
[18]
Richards, Tom Schouwenaars, Jonathan P
Arthur G. Richards, Tom Schouwenaars, Jonathan P. How, and Eric Feron. Spacecraft trajectory planning with avoidance constraints using mixed-integer linear programming.Journal of Guidance, Control, and Dynamics, 25(4):755–764, 2002
work page 2002
-
[19]
Stefano Riverso, Marcello Farina, and Giancarlo Ferrari- Trecate. Plug-and-play decentralized model predictive control for linear systems.IEEE Transactions on Automatic Control, 58(10):2608–2614, 2013
work page 2013
-
[20]
Danilo Saccani, Lorenzo Fagiano, Melanie N. Zeilinger, and Andrea Carron. Model predictive control for multi- agent systems under limited communication and time-varying network topology. arXiv preprint arXiv:2304.01649, 2023
-
[21]
Riccardo Scattolini. Architecture of distributed and hierarchical model predictive control—a review.Journal of Process Control, 19(5):723–731, 2009
work page 2009
-
[22]
Georg Schildbach. Contingency Model-based Control (CMC) for Communicationless Cooperative Collision Avoidance in Robot Swarms, 2025. arXiv preprint arXiv:2512.20391
-
[23]
Tom Schouwenaars, Bart De Moor, Eric Feron, and Jonathan P. How. Mixed integer programming for multi- vehicle path planning. InProceedings of the European Control Conference (ECC), pages 2603–2608, 2001
work page 2001
-
[24]
Valenti, Eric Feron, and Jonathan P
Tom Schouwenaars, Mario J. Valenti, Eric Feron, and Jonathan P. How. Implementation and flight test results of MILP-based UAV guidance.2005 IEEE Aerospace Conference, pages 1–13, 2005
work page 2005
-
[25]
Brett T. Stewart, Aswin N. Venkat, James B. Rawlings, Stephen J. Wright, and Gabriele Pannocchia. Cooperative distributed model predictive control.Systems & Control Letters, 59(8):460–469, 2010
work page 2010
-
[26]
Jakob Stoustrup. Plug & play control: Control technology towards new challenges.European Journal of Control, 15(3– 4):311–330, 2009
work page 2009
-
[27]
Guy, Ming Lin, and Dinesh Manocha
Jur van den Berg, Stephen J. Guy, Ming Lin, and Dinesh Manocha. Reciprocal n-body collision avoidance.The International Journal of Robotics Research, 30(4):371–383, 2011
work page 2011
-
[28]
Aswin N. Venkat, James B. Rawlings, and Stephen J. Wright. Distributed model predictive control of large-scale systems. InAssessment and Future Directions of Nonlinear Model Predictive Control, volume 358 ofLecture Notes in Control and Information Sciences. Springer, 2007
work page 2007
- [29]
-
[30]
A. W¨ achter and L. T. Biegler. On the implementation of an interior-point filter line-search algorithm for large- scale nonlinear programming.Mathematical Programming, 106(1):25–57, 2006. 17
work page 2006
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.