Sea Trial Validation of the ROS-DESERT Middleware with Autonomous Underwater Vehicles
Pith reviewed 2026-05-25 02:56 UTC · model grok-4.3
The pith
Depth-adaptive repositioning of AUVs improves acoustic packet reception at roughly 1 km horizontal separation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The architecture combines a ROS 2 application layer with the DESERT Underwater framework via the rmw_desert middleware and a ROS 1 bridge for legacy compatibility, enabling cross-layer configurability and onboard environmental processing. When used to run a depth-optimization strategy, sea trials off the Gulf of La Spezia confirm measurable improvements in packet reception at 1 km horizontal separation through adaptive repositioning, with negligible differences at shorter ranges where received signal energy stays above thresholds, while also confirming the architecture's modularity and deployability on existing platforms.
What carries the argument
The rmw_desert middleware that bridges ROS 2 with the DESERT Underwater framework to support environmental-aware adaptive communication behaviors and fine-grained stack configurability.
If this is right
- Depth-adaptive repositioning extends effective acoustic link range in littoral waters of average 100 m depth.
- The modular stack supports interoperability between modern ROS 2 applications and legacy ROS 1 vehicle controllers.
- Fine-grained cross-layer configurability allows communication behaviors to be tuned from the application layer.
- The approach is practically deployable on heterogeneous existing AUV platforms without hardware modification.
- Performance gains appear primarily where received signal energy is marginal for demodulation.
Where Pith is reading between the lines
- The same middleware pattern could support other adaptive tactics such as transmit power or frequency selection based on real-time measurements.
- Communication-aware path planning could become a standard layer in multi-AUV mission software.
- Scaling the system to larger fleets would likely require additional coordination mechanisms beyond pairwise link optimization.
Load-bearing premise
The packet reception differences observed in the trials stem from the depth strategy rather than unmeasured environmental conditions or hardware variations.
What would settle it
Repeat the same sea trials with the depth-optimization strategy disabled and check whether the packet reception advantage at 1 km separation disappears.
Figures











read the original abstract
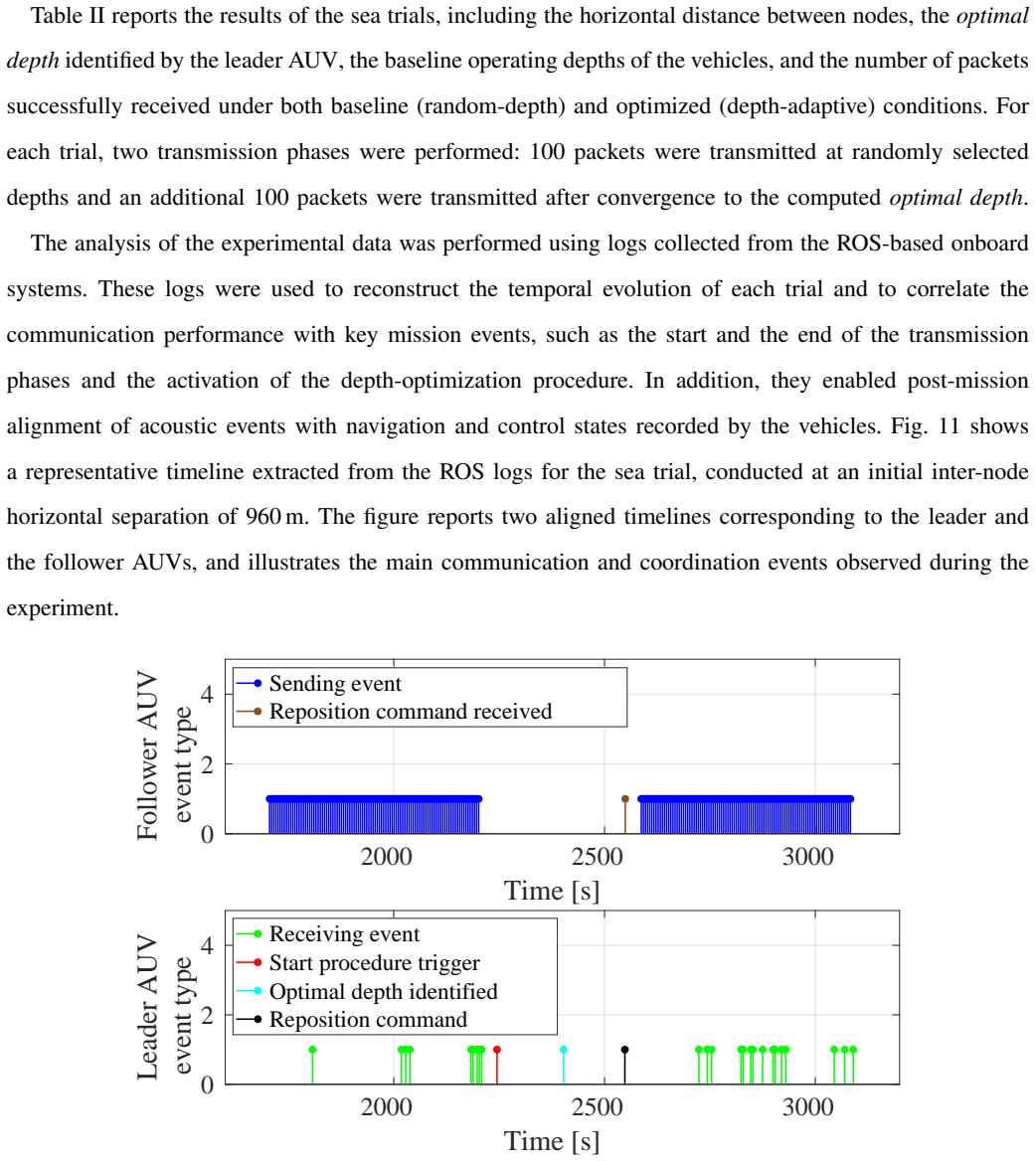
This paper presents a modular software architecture that enables environmental-aware coordination of heterogeneous Autonomous Underwater Vehicles (AUVs) to improve underwater acoustic connectivity. The architecture combines a Robot Operating System 2 application layer with the DESERT Underwater communication framework through the rmw_desert middleware, and integrates a Robot Operating System 1 bridge to ensure interoperability with legacy vehicle front-seat controllers. This design enables fine-grained, cross-layer configurability of the communication stack and supports onboard processing of environmental measurements to inform adaptive communication behaviors. As a representative use case, this architecture is used to implement a lightweight depth-optimization strategy that exploits environmental awareness and AUV mobility to improve acoustic link performance. The complete software stack is validated through sea trials conducted off the Gulf of La Spezia in littoral water with an average depth of approximately 100m using a deployment involving three AUVs with distinct operational roles. Experimental results indicate that depth-adaptive repositioning yields measurable gains in packet reception at horizontal separation of approximately 1km, while differences are negligible at shorter ranges where the received signal energy remains above demodulation thresholds. Beyond link-level performance the sea trials confirm the feasibility, modularity, and practical deployability of the proposed architecture on existing AUV platforms.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a modular middleware architecture (rmw_desert) that integrates ROS 2 with the DESERT underwater communication framework and a ROS 1 bridge for legacy AUV interoperability. It implements a lightweight depth-optimization strategy that uses environmental awareness to adapt AUV depth for improved acoustic links, and validates the full stack via sea trials in the Gulf of La Spezia (~100 m littoral water) with three heterogeneous AUVs. The central experimental claim is that depth-adaptive repositioning produces measurable packet-reception gains at ~1 km horizontal range while differences are negligible at shorter ranges.
Significance. If the experimental claims are substantiated with quantitative data and controls, the work would demonstrate a practical, deployable middleware enabling cross-layer environmental-aware behaviors on existing AUV platforms. This addresses a recognized gap between simulation frameworks and operational underwater acoustic systems.
major comments (2)
- [Abstract] Abstract: the statement that 'experimental results indicate that depth-adaptive repositioning yields measurable gains in packet reception' supplies no quantitative values, error bars, statistical tests, sample sizes, or exclusion criteria. The central claim of measurable, attributable improvement therefore rests on an unreported dataset whose quality cannot be assessed.
- [Experimental validation / sea trials] Sea-trial description: no paired control runs at fixed depth, no repeated trials under statistically comparable conditions, and no hypothesis test on the reception-rate delta are described. Without these, the causal attribution of reception differences at ~1 km to the middleware-enabled depth strategy cannot be isolated from sound-speed profile changes, depth-sensor drift, positioning error, or hardware-specific modem behavior.
Simulated Author's Rebuttal
We thank the referee for the constructive comments highlighting the need for greater transparency in our experimental claims. We address each point below and commit to revisions that improve the reporting without overstating the results.
read point-by-point responses
-
Referee: [Abstract] Abstract: the statement that 'experimental results indicate that depth-adaptive repositioning yields measurable gains in packet reception' supplies no quantitative values, error bars, statistical tests, sample sizes, or exclusion criteria. The central claim of measurable, attributable improvement therefore rests on an unreported dataset whose quality cannot be assessed.
Authors: We agree that the abstract should be more specific. In the revised manuscript we will insert the observed packet reception rates (with sample sizes) at the ~1 km range and at shorter ranges, along with any available measures of variability from the trial logs. The underlying dataset consists of the logged transmissions from the three-AUV deployment described in Section IV; we will add a pointer to the results tables and clarify any packet exclusion rules applied during post-processing. revision: yes
-
Referee: [Experimental validation / sea trials] Sea-trial description: no paired control runs at fixed depth, no repeated trials under statistically comparable conditions, and no hypothesis test on the reception-rate delta are described. Without these, the causal attribution of reception differences at ~1 km to the middleware-enabled depth strategy cannot be isolated from sound-speed profile changes, depth-sensor drift, positioning error, or hardware-specific modem behavior.
Authors: The sea trials were performed as a single integrated field deployment to validate the complete middleware stack under realistic operational constraints rather than as a controlled laboratory-style experiment. Performance was compared across ranges within the same deployment. We accept that this design precludes strong causal isolation and will revise the text to present the 1 km gains as observational evidence of feasibility, explicitly discuss the listed confounding factors, and state that no formal hypothesis testing was performed. These changes will be made in the experimental section and in a new limitations paragraph. revision: partial
- The original sea trials did not include paired fixed-depth control runs or repeated trials under statistically comparable conditions; these elements cannot be supplied without new experiments.
Circularity Check
No circularity: experimental sea-trial validation with no derivation or fitted predictions
full rationale
The paper is a report of sea trials validating a middleware stack (ROS-DESERT) for AUV coordination. It presents no mathematical derivation, no first-principles equations, no parameter fitting, and no 'predictions' that reduce to inputs by construction. The central claim (depth-adaptive repositioning improves packet reception at ~1 km) is an empirical observation from trials, not a result derived from self-referential definitions or self-citations. No load-bearing steps match any of the enumerated circularity patterns; the work is self-contained against external benchmarks (actual sea data).
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
depth-adaptive repositioning yields measurable gains in packet reception at horizontal separation of approximately 1km
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
rmw_desert middleware... TDMA... EvoLogicsS2C
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
W. H. O. Institution,Dalio Explore Fund Annual Report 2019: REMUS 6000 — Video Plankton Recorder, 2019, annual report of the Dalio Explore Fund. Available: https://www.whoi.edu/wp-content/uploads/2021/11/Dalio-Explore-Fund-Annual-Report-2019.pdf
work page 2019
-
[2]
K. Zwolaket al., “The autonomous underwater vehicle integrated with the unmanned surface vessel mapping the southern ionian sea. the winning technology solution of the shell ocean discovery xprize,”Remote Sensing, vol. 12, no. 8, 2020, p. 1344, doi: 10.3390/rs12081344
-
[4]
Lurton,An Introduction to Underwater Acoustics: Principles and Applications, 2nd ed
X. Lurton,An Introduction to Underwater Acoustics: Principles and Applications, 2nd ed. Berlin, Germany: Springer, 2010. Available: https://link.springer.com/book/9783540784807 30
-
[5]
Underwater acoustic communications,
M. Stojanovic, “Underwater acoustic communications,” inUnderwater Acoustic Digital Signal Processing and Communication Systems, R. S. H. Istepanian and M. Stojanovic, Eds. Springer, 2002. Available: https://link.springer.com/book/10.1007/978-1-4757-3617-5
-
[6]
Adaptive Cooperative Algorithms for AUV Networks,
A. Caiti and A. Munaf `o, “Adaptive Cooperative Algorithms for AUV Networks,”IEEE International Conference on Communications Workshops, 2010, pp. 1–5, doi: 10.1109/ICCW.2010.5503952
-
[7]
D. Costa, F. Campagnaro, and M. Zorzi, “Robot Operating System (ROS) talks underwater: an open-source communication middleware to control underwater vehicles,”IEEE International Workshop on Metrology for the Sea; Learning to Measure Sea Health Parameters (MetroSea), 2025, pp. 123–127, doi: 10.1109/MetroSea66681.2025.11245708
-
[8]
R. Masieroet al., “DESERT Underwater: An NS-Miracle-based framework to design, simulate, emulate and realize test-beds for underwater network protocols,”IEEE Oceans - Yeosu, 2012, pp. 1–10, doi: 10.1109/OCEANS-Yeosu.2012.6263524
-
[9]
The DESERT Underwater framework v2: Improved capabilities and extension tools,
F. Campagnaroet al., “The DESERT Underwater framework v2: Improved capabilities and extension tools,” 2016, pp. 1–5, doi: 10.1109/UComms.2016.7583420
-
[10]
Recent advances in underwater acoustic communications and networking,
M. Chitre, S. Shahabudeen, L. Freitag and M. Stojanovic, “Recent advances in underwater acoustic communications and networking,” OCEANS, 2008, pp. 1–10, doi: 10.1109/OCEANS.2008.5152045
-
[11]
Underwater Acoustic Communications and Networking: Recent Advances and Future Challenges,
M. Chitre, S. Shahabudeen and M. Stojanovic, “Underwater Acoustic Communications and Networking: Recent Advances and Future Challenges,”Marine Technology Society Journal, vol. 42, no. 1, March 2008, pp. 103–116, doi: 10.4031/002533208786861263
-
[12]
Experimental Demonstrations of CATL, the Collaborative Autonomy Tasking Layer,
M. W. G. van Riet, J. Alves, G. Arcieri, L. Bazzarello, J. de Sousa Borges, M. Colin, A. Cormack, P. Dias, J. Dinale, G. Ferri, S. Fioravanti, T. Furfaro, M. Guesdon, M. Horstmann, M. Macia ´s, B. Marshall, L. Morlando, A. Munaf `o, V . Newsum, Y . Pailhas, M. Payne, R. Petroccia, S. Spears and A. Tesei, “Experimental Demonstrations of CATL, the Collabora...
work page doi:10.1109/oceanslimerick52467.2023.10244669 2023
-
[13]
Moos middleware and node adaptivity in underwater sensor networks: Results from the UAN11 SEA trial,
A. Caiti, V . Calabr`o, G. Dini, A. Lo Duca and A. Munaf`o, “Moos middleware and node adaptivity in underwater sensor networks: Results from the UAN11 SEA trial,”Proceedings of Meetings on Acoustics, vol. 17, no. 1, Jan. 2012, pp. 1263–1270, doi: 10.1121/1.4772678
-
[14]
GUWMANET — Multicast routing in Underwater Acoustic Networks,
M. Goetz and I. Nissen, “GUWMANET — Multicast routing in Underwater Acoustic Networks,” inProceedings of the Military Communications and Information Systems Conference (MCC). IEEE, Jan. 2012, pp. 1–8. Available: https://ieeexplore.ieee.org/document/6387908
-
[15]
Underwater acoustic sensor networks: Research challenges,
I. F. Akyildiz, D. Pompili, T. Melodia, “Underwater acoustic sensor networks: Research challenges,”Ad Hoc Networks, vol. 3, May 2005, pp. 257–279, doi: 10.1016/j.adhoc.2005.01.004
-
[16]
H. Xu and X. Yuan, “Cross-Layer Design for Energy-Efficient Reliable Multi-Path Transmission in Event-Driven Wireless Sensor Networks,”Sensors, vol. 23, no. 14, 2023, p. 6520, doi: 10.3390/s23146520
-
[17]
Advanced autonomy architecture for maritime applications A V A,
J. Weaver, J. Perkins, and D. Sternlicht, “Advanced autonomy architecture for maritime applications A V A,”OCEANS MTS/IEEE Monterey, 2016, pp. 1–8, doi: 10.1109/OCEANS.2016.7761389
-
[18]
Generic Underwater Application Language (GUW AL),
I. Nissen and M. Goetz, “Generic Underwater Application Language (GUW AL),” inFinal Demonstration, La Spezia, May 2014, doi: 10.13140/RG.2.1.2480.4081, doi: 10.13140/RG.2.1.2480.4081
-
[19]
The dynamic compact control language version 3,
T. Schneider, S. Petillo, H. Schmidt, and C. Murphy, “The dynamic compact control language version 3,”OCEANS - Genova, 2015, pp. 1–7, doi: 10.1109/OCEANS-Genova.2015.7271608
-
[20]
ROS Message Transport over Underwater Acoustic Links with ros acomms,
E. Gallimore, D. Giaya, B. Miller-Klugman, C. Fitzgerald, K. Griffen, L. Lindzey and L. Freitag, “ROS Message Transport over Underwater Acoustic Links with ros acomms,”Proceedings of the 2022 IEEE/OES Autonomous Underwater Vehicles Symposium (AUV), 2022, pp. 1–6, doi: 10.1109/AUV53081.2022.9965848
-
[21]
Communication for underwater sensor networks: A comprehensive summary,
A. Pal, F. Campagnaro, K. Ashraf, M. Rashed, A. Ashok, and H. Guo, “Communication for underwater sensor networks: A comprehensive summary,”ACM Trans. Sen. Netw., vol. 19, no. 1, Dec. 2022, doi: 10.1145/3546827. 31
-
[22]
Internet of underwater things and big marine data analytics — a comprehensive survey,
M. Jahanbakht, W. Xiang, L. Hanzo, and M. R. Azghadi, “Internet of underwater things and big marine data analytics — a comprehensive survey,”IEEE Communications Surveys & Tutorials, vol. 23, no. 2, Apr. 2021, pp. 904–956, doi: 10.1109/COMST.2021.3053118
-
[23]
Underwater internet of things in smart ocean: System architecture and open issues,
T. Qiu, Z. Zhao, T. Zhang, C. Chen, and C. L. P. Chen, “Underwater internet of things in smart ocean: System architecture and open issues,”IEEE Transactions on Industrial Informatics, vol. 16, no. 7, Jul. 2020, pp. 4297–4307, doi: 10.1109/TII.2019.2946618
-
[24]
R. Liu, L. Liu, and F. Wang, “The role of hydrostatic pressure on the metal corrosion in simulated deep-sea environments – a review,” Journal of Materials Science & Technology, vol. 112, 2022, pp. 230–238, doi: 10.1016/j.jmst.2021.10.014
-
[25]
Progress of material degradation: metals and polymers in deep-sea environments,
Z. Haoet al., “Progress of material degradation: metals and polymers in deep-sea environments,”Corrosion Reviews, vol. 43, no. 3, Dec. 2024, pp. 315–334, doi: 10.1515/corrrev-2024-0009
-
[26]
Thermal and biofouling effects on underwater wireless power transfer,
J. Oiler, G. Anderson, V . Bana, A. Phipps, M. Kerber, and J. D. Rockway, “Thermal and biofouling effects on underwater wireless power transfer,” inProceedings of the 2015 IEEE Wireless Power Transfer Conference (WPTC). Boulder, CO, USA: IEEE, May 2015, doi: 10.1109/WPT.2015.7140146, doi: 10.1109/WPT.2015.7140146
-
[27]
Understanding biofouling and contaminant accretion on submerged marine structures,
P. Vuong, A. McKinley, and P. Kaur, “Understanding biofouling and contaminant accretion on submerged marine structures,”npj Materials Degradation, vol. 7, no. 1, Jun. 2023, p. 50, doi: 10.1038/s41529-023-00370-5
-
[28]
Auv navigation and localization: A review,
L. Paull, S. Saeedi, M. L. Seto, and H. Li, “Auv navigation and localization: A review,”IEEE Journal of Oceanic Engineering, vol. 39, no. 1, Jan. 2014, pp. 131–149, doi: 10.1109/JOE.2013.2278891
-
[29]
A survey on energy efficiency in underwater wireless communications,
K. Y . Islam, I. Ahmad, D. Habibi, and A. Waqar, “A survey on energy efficiency in underwater wireless communications,”Journal of Network and Computer Applications, vol. 198, Feb. 2022, pp. 103–135, doi: 10.1016/j.jnca.2021.103295
-
[30]
Underwater acoustic communication channels: Propagation models and statistical characterization,
M. Stojanovic and J. Preisig, “Underwater acoustic communication channels: Propagation models and statistical characterization,”IEEE Communications Magazine, vol. 47, no. 1, Jan. 2009, pp. 84–89, doi: 10.1109/MCOM.2009.4752682
-
[31]
A Review on Practical Considerations and Solutions in Underwater Wireless Optical Communication,
X. Sunet al., “A Review on Practical Considerations and Solutions in Underwater Wireless Optical Communication,”Journal of Lightwave Technology, vol. 38, no. 2, Jan. 2020, pp. 421–431, doi: 10.1109/JLT.2019.2946606
-
[32]
Experimental Demonstration of High Speed Underwater Visible Light Communications,
G. Cossuet al., “Experimental Demonstration of High Speed Underwater Visible Light Communications,”2nd International Workshop on Optical Wireless Communications (IWOW), 2013, pp. 11–15, doi: 10.1109/IWOW.2013.6777767
-
[33]
Y . Li, S. Wang, C. Jin, Y . Zhang, and T. Jiang, “A survey of underwater magnetic induction communications: Fundamental issues, recent advances, and challenges,”IEEE Communications Surveys & Tutorials, vol. 21, no. 3, 2019, pp. 2466–2488, doi: 10.1109/COMST.2019.2892810
-
[34]
Underwater communication technologies: a review,
T. Theocharidis and E. Kavallieratou, “Underwater communication technologies: a review,”Telecommunication Systems, vol. 88, 2025, p. 54, doi: 10.1007/s11235-025-01279-x
-
[35]
Underwater Wireless Sensor Networks: A Survey,
I. F. Akyildiz, T. Melodia and K. R. Chowdhury, “Underwater Wireless Sensor Networks: A Survey,”Wireless Communications and Mobile Computing, Jan. 2019, pp. 1–20, doi: 10.1155/2019/6470359
-
[36]
W. Aman, S. Al-Kuwari, A. Kumar, M. M. U. Rahman, and M. Muzzammil, “Underwater and air-water wireless commu- nication: State-of-the-art, channel characteristics, security, and open problems,”arXiv preprint arXiv:2203.02667, 2022, doi: 10.48550/arXiv.2203.02667
-
[37]
F `olaga: A low-cost autonomous underwater vehicle combining glider and AUV capabilities,
A. Alvarezet al., “F `olaga: A low-cost autonomous underwater vehicle combining glider and AUV capabilities,”Ocean Engineering, vol. 36, no. 1, 2009, pp. 24–38, doi: 10.1016/j.oceaneng.2008.08.014
-
[38]
A. Caffaz, A. Caiti, G. Casalino, and A. Turetta, “The hybrid glider/AUV FOLAGA,”IEEE Robotics and Automation Magazine, vol. 17, no. 1, 2010, pp. 31–44, doi: 10.1109/MRA.2010.935791
-
[39]
A. Caiti, V . Calabr `o, G. Dini, A. Lo Duca, and A. Munaf `o, “Mobile underwater sensor networks for protection and security: field experience at the UAN11 experiment,”Journal of Filed Robotics, vol. vol. 30, Mar. 2013, pp. 237 – 253, doi: 10.1002/rob.21447. 32
-
[40]
Exploiting mobility to improve underwater sensor networks,
R. W. L. Coutinho and A. Boukerche, “Exploiting mobility to improve underwater sensor networks,”16th ACM International Symposium on Mobility Management and Wireless Access (MobiWac’18), 2018, pp. 89–94, doi: 10.1145/3265863.3268073
-
[41]
Movement assisted-topology control and geographic routing protocol for underwater sensor networks,
R. W. L. Coutinho, L. F. M. Vieira, and A. A. F. Loureiro, “Movement assisted-topology control and geographic routing protocol for underwater sensor networks,”Proceedings of the 16th ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems, 2013, pp. 189–196, doi: 10.1145/2507924.2507956
-
[42]
N. Li, B. C ¨ur¨ukl¨u, J. Bastos, V . Sucasas, J. A. S. Fernandez, and J. Rodriguez, “A Probabilistic and Highly Efficient Topology Control Algorithm for Underwater Cooperating AUV Networks,”Sensors, vol. 17, no. 5, 2017, p. 1022, doi: 10.3390/s17051022
-
[43]
H. Chen, W. Cai, and M. Zhang, “AUV-aided computing offloading for multi-tier underwater computing: A Stackelberg game learning approach,”Ocean Engineering, vol. 297, 2024, pp. 109–117, doi: 10.1016/j.oceaneng.2024.117109
-
[44]
Multiple-UUV approach for enhancing connectivity in underwater ad-hoc sensor networks,
W. K. G. Seah, H. Tan, Z. Liu, and M. H. Ang, “Multiple-UUV approach for enhancing connectivity in underwater ad-hoc sensor networks,” inProceedings of OCEANS MTS/IEEE. IEEE, 2005, pp. 2263–2268, doi: 10.1109/OCEANS.2005.1640102
-
[45]
Underwater Acoustic Sensors Data Collection in the Robotic Vessels as-a-Service Project,
A. Signori, F. Campagnaro, D. Zordan, F. Favaro and M. Zorzi, “Underwater Acoustic Sensors Data Collection in the Robotic Vessels as-a-Service Project,” inProceedings of OCEANS Marseille. IEEE, 2019, pp. 1–9, doi: 10.1109/OCEANSE.2019.8867100
-
[46]
Cooperative Position Aware Mobility Pattern of AUVs for Avoiding V oid Zones in Underwater WSNs,
N. Javaidet al., “Cooperative Position Aware Mobility Pattern of AUVs for Avoiding V oid Zones in Underwater WSNs,”Sensors, vol. 17, no. 3, 2017, p. 580, doi: 10.3390/s17030580
-
[47]
Adaptive Scheduling MAC Protocol in Underwater Acoustic Broadcast Communications for AUV Formation,
M. Liuet al., “Adaptive Scheduling MAC Protocol in Underwater Acoustic Broadcast Communications for AUV Formation,”IEEE Internet of Things Journal, vol. 10, no. 8, 2023, pp. 6887–6901, doi: 10.1109/JIOT.2022.3227265
-
[48]
A Load-adaptive CSMA/CA MAC Protocol for Mobile Underwater Acoustic Sensor Networks,
Y . Zhang, H. Chen, and W. Xu, “A Load-adaptive CSMA/CA MAC Protocol for Mobile Underwater Acoustic Sensor Networks,” in Proceedings of the 10th International Conference on Wireless Communications and Signal Processing (WCSP). IEEE, 2018, pp. 1–7, doi: 10.1109/WCSP.2018.8555631
-
[49]
T. Schneider and H. Schmidt, “Model-based adaptive behavior framework for optimal acoustic communication and sensing by marine robots,”IEEE Journal of Oceanic Engineering, vol. 38, no. 3, 2013, pp. 522–533, doi: 10.1109/JOE.2012.2232492
-
[50]
Autonomy for unmanned marine vehicles with MOOS-IvP,
M. R. Benjamin, H. Schmidt, P. M. Newman, and J. J. Leonard, “Autonomy for unmanned marine vehicles with MOOS-IvP,”Marine Robot Autonomy, 11 2013, pp. 47–90, doi: 10.1007/978-1-4614-5659-9-2
-
[51]
M. Porter and Y . Liu, “Finite-element ray tracing,” inProceedings of the International Conference on Theoretical and Computational Acoustics, vol. 2, 1992, pp. 947–956. Available: https://digitalcommons.njit.edu/theses/1783
work page 1992
-
[52]
The bellhop manual and user’s guide: Preliminary draft,
M. Porter and B. Michael, “The bellhop manual and user’s guide: Preliminary draft,”Heat, Light, and Sound Research, Inc., La Jolla, CA, USA, Tech. Rep, vol. 260, 2011. Available: http://oalib.hlsresearch.com/Rays/HLS-2010-1.pdf
work page 2011
-
[53]
The KRAKEN normal mode program,
M. B. Porter, “The KRAKEN normal mode program,” SACLANT Undersea Research Centre, La Spezia, Italy, Tech. Rep., May
-
[54]
Available: http://oalib.hlsresearch.com/Modes/kraken.pdf
-
[55]
D. Cosimoet al., “Improving Underwater Acoustic Network Performance with AUV Swarm Mobility and Environmental Awareness,” inProceedings of OCEANS 2025 Brest. IEEE, 2025, pp. 1–8, doi: 10.1109/OCEANS58557.2025.11104779
-
[56]
F. Guerra, P. Casari, and M. Zorzi, “World ocean simulation system (WOSS): a simulation tool for underwater networks with realistic propagation modeling.”Proceedings of the 4th ACM International Workshop on Underwater Networks, 2009, doi: 10.1145/1654130.1654134
-
[57]
Open-source suites for the underwater networking community: WOSS and DESERT Underwater,
P. Casariet al., “Open-source suites for the underwater networking community: WOSS and DESERT Underwater,”IEEE Network, special issue on “Open Source for Networking: Development and Experimentation”, vol. 28, no. 5, Oct. 2014, pp. 38–46, doi: 10.1109/MNET.2014.6915438
-
[58]
Software engineering research on the robot operating system: A systematic mapping study,
M. Albonico, M. Dordevi ´c, E. Hamer, and I. Malavolta, “Software engineering research on the robot operating system: A systematic mapping study,”Journal of Systems and Software, vol. 197, 2023, pp. 111–139, doi: 10.1016/j.jss.2022.111574. 33
-
[59]
Science Robotics7(66), 6074 (2022) https://doi.org/10.1126/scirobotics.abm6074
S. Macenski, T. Foote, B. Gerkey, C. Lalancette, and W. Woodall, “Robot operating system 2: Design, architecture, and uses in the wild,”Science Robotics, vol. 7, no. 66, 2022, pp. 60–74, doi: 10.1126/scirobotics.abm6074
-
[60]
Testing network protocols via the desert underwater framework: The commsnet’13 experience,
G. Toso, I. Calabrese, F. Favaro, L. Brolo, P. Casari, and M. Zorzi, “Testing network protocols via the desert underwater framework: The commsnet’13 experience,” inIEEE Oceans - St. John’s, Sep. 2014, pp. 1–8, doi: 10.1109/OCEANS.2014.7003105
-
[61]
System Architecture and Communication Infrastructure for the RoboVaaS Project,
E. Coccoloet al., “System Architecture and Communication Infrastructure for the RoboVaaS Project,”IEEE Journal of Oceanic Engineering, vol. 48, no. 3, 2023, pp. 716–739, doi: 10.1109/JOE.2023.3234710
-
[62]
GraalTech, “Graaltech official website,” https://www.graaltech.com/it/, accessed: 29 August 2025
work page 2025
-
[63]
The Backseat Control Architecture for Autonomous Robotic Vehicles: A Case Study with the Iver2 AUV,
D. P. Eickstedt and S. R. Sideleau, “The Backseat Control Architecture for Autonomous Robotic Vehicles: A Case Study with the Iver2 AUV,”Marine Technology Society Journal, vol. 44, no. 4, 2010, pp. 42–54, doi: 10.4031/MTSJ.44.4.1
-
[64]
Adaptable underwater networks: The relation between autonomy and communications,
A. Hamiltonet al., “Adaptable underwater networks: The relation between autonomy and communications,”Remote sensing, vol. 12, no. 20, Oct. 2020, p. 3290, doi: 10.3390/rs12203290
-
[65]
Ros.org — powering the world’s robots
Open Robotics, “Ros.org — powering the world’s robots.” Available: https://www.ros.org
-
[66]
RFC 8949: Concise Binary Object Representation (CBOR),
C. Bormann and P. Hoffman, “RFC 8949: Concise Binary Object Representation (CBOR),” USA, 2020. Available: https://datatracker.ietf.org/doc/html/rfc8949
work page 2020
-
[67]
R. J. Urick,Principles of Underwater Sound. Peninsula Publishing, 1983. Available: https://books.google.it/books?id= MBBgQgAACAAJ
work page 1983
-
[68]
World Meteorological Organization, “Part A - Alphanumeric Codes,” inManual on Codes - International Codes. Volume I.1, Annex II to the WMO Technical Regulations. Geneva, Switzerland: World Meteorological Organization, 2019, no. WMO-No. 306, table 3700 (Sea State code) on p. A-326. Available: https://codes.wmo.int/codeform/3700
work page 2019
-
[69]
A shadow zone aware routing protocol for acoustic underwater sensor networks,
S. T. Nguyen, E. Cayirci, L. Yan, and C. Rong, “A shadow zone aware routing protocol for acoustic underwater sensor networks,” IEEE Communications Letters, vol. 13, no. 5, May 2009, doi: 10.1109/LCOMM.2009.090278. 34
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.