Simulation-Informed Diffusion for Decentralized Multi-robot Motion Planning
Pith reviewed 2026-06-29 16:41 UTC · model grok-4.3
The pith
Constraint-aware diffusion models let each robot simulate neighbors' trajectories from local observations to plan its own safe path.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
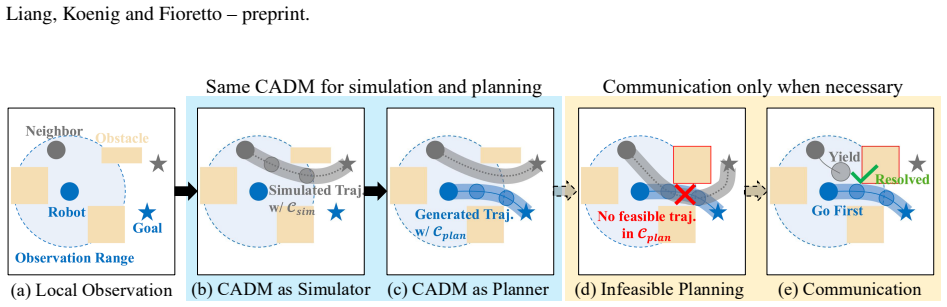
SID builds on constraint-aware diffusion models to simulate the future trajectories of neighboring robots from their currently observed states, and then uses the same CADM to plan each robot's own trajectory under safety constraints informed by these simulations, allowing accurate anticipation that supports minimal communication in congested scenarios.
What carries the argument
Constraint-aware diffusion model (CADM) used for both simulating neighbors' trajectories and planning own trajectory with informed safety constraints.
If this is right
- Decentralized planning improves by replacing static snapshots with forward simulation of neighbor motion.
- Communication drops to a minimal trigger activated only in highly congested settings.
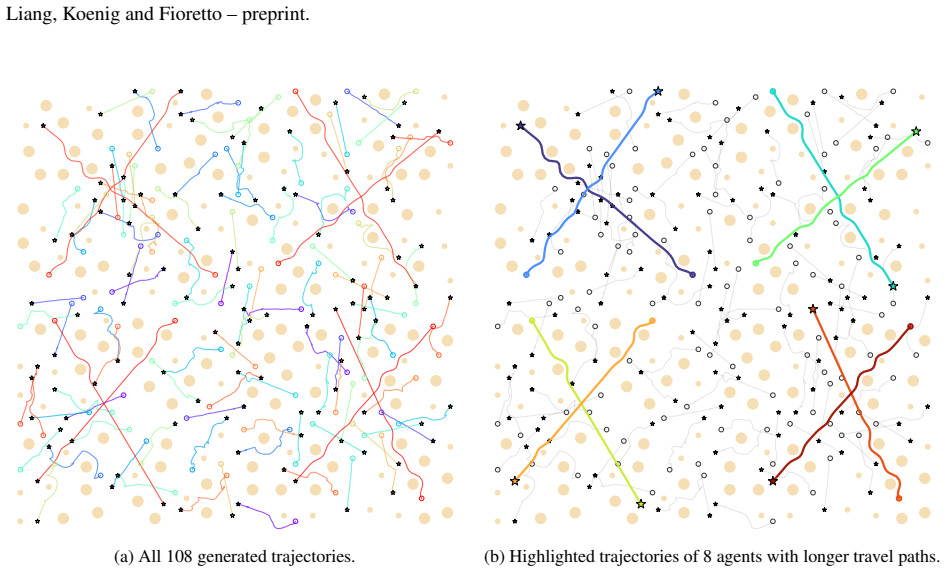
- The method scales to at least 108 robots and 160 obstacles while outperforming baselines.
- Planning effectiveness and constraint satisfaction rise consistently across varied environments.
Where Pith is reading between the lines
- The same model could be reused in other multi-agent settings where prediction and planning share the same generative structure.
- Accurate local trajectory simulation might allow operation with even less communication than the minimal scheme described.
- If the simulations remain reliable at larger scales, the approach could support teams beyond the 108-robot demonstrations without added global infrastructure.
Load-bearing premise
The constraint-aware diffusion model produces sufficiently accurate simulations of neighboring robots' future trajectories from only local observations.
What would settle it
An experiment in which the generated simulations deviate enough from actual neighbor paths that SID produces more collisions or planning failures than non-simulation baselines.
Figures

read the original abstract
Decentralized multi-robot motion planning requires each robot to generate collision-free trajectories from local observations, without global sensing or reliable communication. However, most existing planners, whether classical or learning-based, generate trajectories from a static snapshot of the local observation, which limits their ability to anticipate the future behavior of neighboring robots. This limitation is critical as the number of robots increases and the environment becomes more cluttered. To overcome this challenge, this paper introduces Simulation-Informed Diffusion (SID), a decentralized framework built on constraint-aware diffusion models (CADM). SID first uses CADM to simulate the future trajectories of neighboring robots from their currently observed states, and then uses the same CADM to plan each robot's own trajectory under safety constraints informed by these simulations. Crucially, the accurate simulation of neighbors enables a minimal communication scheme that triggers coordination only when necessary in highly congested scenarios. Experiments across diverse environments show that SID consistently outperforms baseline methods in terms of planning effectiveness and constraint satisfaction, and scales to scenarios with 108 robots and 160 obstacles.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Simulation-Informed Diffusion (SID), a decentralized framework for multi-robot motion planning that employs constraint-aware diffusion models (CADM) to simulate future trajectories of neighboring robots based on local observations. These simulations then inform the planning of each robot's own trajectory under safety constraints, and enable a minimal-communication scheme that triggers coordination only when necessary. The paper reports that SID outperforms baseline methods in planning effectiveness and constraint satisfaction across diverse environments and scales to scenarios with 108 robots and 160 obstacles.
Significance. If the results hold with proper validation of the simulation step, this would advance decentralized multi-robot planning by enabling predictive anticipation of neighbors from local data alone, reducing reliance on communication or global sensing. The reported scaling to over 100 robots in cluttered settings would be a notable practical contribution if the performance gains are robustly attributable to the simulation-informed mechanism rather than implementation specifics.
major comments (1)
- [Experiments] Experiments section (and abstract): The central claim that accurate neighbor-trajectory simulation via CADM enables both safe planning and the minimal-communication trigger is load-bearing, yet no separate quantitative validation of simulation fidelity (e.g., ADE/FDE, prediction error against ground-truth neighbor trajectories, or ablation removing the simulation step) is reported. Aggregate planning success and constraint-satisfaction metrics alone do not establish that the simulations are sufficiently accurate for the safety and scaling results to follow from this mechanism.
minor comments (1)
- [Abstract] Abstract: Reports outperformance and scaling but provides no quantitative metrics, baseline names, error bars, or ablation details, which hinders immediate assessment of the claims.
Simulated Author's Rebuttal
We thank the referee for their detailed review and constructive comments on our manuscript. We address the major concern regarding the validation of the simulation component below.
read point-by-point responses
-
Referee: [Experiments] Experiments section (and abstract): The central claim that accurate neighbor-trajectory simulation via CADM enables both safe planning and the minimal-communication trigger is load-bearing, yet no separate quantitative validation of simulation fidelity (e.g., ADE/FDE, prediction error against ground-truth neighbor trajectories, or ablation removing the simulation step) is reported. Aggregate planning success and constraint-satisfaction metrics alone do not establish that the simulations are sufficiently accurate for the safety and scaling results to follow from this mechanism.
Authors: We agree that providing separate quantitative validation of the neighbor-trajectory simulation fidelity would strengthen the manuscript's claims. The current experiments focus on end-to-end performance metrics, which implicitly rely on the simulation quality but do not isolate it. In the revised version, we will add an ablation study that compares the full SID framework against a variant without the simulation step (i.e., planning based solely on static local observations). Additionally, where possible in our simulated environments, we will report prediction metrics such as Average Displacement Error (ADE) and Final Displacement Error (FDE) for the CADM-simulated trajectories against ground-truth neighbor paths. This will directly address whether the simulation accuracy underpins the observed improvements in safety and scalability. revision: yes
Circularity Check
No circularity: new framework combination with external experimental validation
full rationale
The paper introduces SID as a combination of CADM-based neighbor simulation and own-trajectory planning under constraints, with performance evaluated on diverse environments up to 108 robots. No equations, derivations, or claims in the provided text reduce any result to a fitted parameter or self-citation chain; the central mechanism is presented as a novel integration rather than a re-derivation of prior fitted quantities. The abstract and description contain no self-definitional loops, fitted-input predictions, or load-bearing self-citations. This is the common case of a self-contained empirical framework.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Constraint-aware diffusion models trained on trajectory data can generate sufficiently accurate future simulations of neighboring robots from local observations alone.
Reference graph
Works this paper leans on
-
[1]
Schoellig, and Raffaello D’Andrea
Federico Augugliaro, Angela P. Schoellig, and Raffaello D’Andrea. Generation of collision-free trajectories for a quadrocopter fleet: A sequential convex programming approach. In2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 1917–1922,
1917
-
[2]
Yuxiao Chen, Ugo Rosolia, and Aaron D
doi: 10.1109/TRO.2025.3593109. Yuxiao Chen, Ugo Rosolia, and Aaron D. Ames. Decentralized task and path planning for multi-robot systems.IEEE Robotics and Automation Letters, 6(3):4337–4344,
-
[3]
Jacob K Christopher, Stephen Baek, and Ferdinando Fioretto
doi: 10.1109/LRA.2021.3068103. Jacob K Christopher, Stephen Baek, and Ferdinando Fioretto. Constrained synthesis with projected diffusion models. InAdvances in Neural Information Processing Systems, volume
-
[4]
Dayi Dong, Maulik Bhatt, Seoyeon Choi, and Negar Mehr
doi: 10.1109/LRA.2021.3062803. Dayi Dong, Maulik Bhatt, Seoyeon Choi, and Negar Mehr. Mimic-d: Multi-modal imitation for multi-agent coordination with decentralized diffusion policies.arXiv preprint arXiv:2509.14159,
-
[5]
Jonathan Ho, Ajay Jain, and Pieter Abbeel
doi: 10.1109/LRA.2021.3067851. Jonathan Ho, Ajay Jain, and Pieter Abbeel. Denoising diffusion probabilistic models.Advances in neural information processing systems, 33:6840–6851,
-
[6]
AID: Agent Intent from Diffusion for Multi-Agent Informative Path Planning
Jeric Lew, Yuhong Cao, Derek Ming Siang Tan, and Guillaume Sartoretti. Aid: Agent intent from diffusion for multi-agent informative path planning.arXiv preprint arXiv:2512.02535,
work page internal anchor Pith review Pith/arXiv arXiv
-
[7]
Simultaneous multi-robot motion planning with projected diffusion models
Jinhao Liang, Jacob K Christopher, Sven Koenig, and Ferdinando Fioretto. Simultaneous multi-robot motion planning with projected diffusion models. InProceedings of the 42nd International Conference on Machine Learning, volume 267 ofProceedings of Machine Learning Research, pages 37162–37180. PMLR, 13–19 Jul 2025a. Jinhao Liang, Sven Koenig, and Ferdinando...
-
[8]
doi: 10.1109/LRA.2023. 3292071. Hao Luan, Yi Xian Goh, See-Kiong Ng, and Chun Kai Ling. Projected coupled diffusion for test-time constrained joint generation.arXiv preprint arXiv:2508.10531,
work page internal anchor Pith review Pith/arXiv arXiv doi:10.1109/lra.2023 2023
-
[9]
Potential based diffusion motion planning.arXiv preprint arXiv:2407.06169,
Yunhao Luo, Chen Sun, Joshua B Tenenbaum, and Yilun Du. Potential based diffusion motion planning.arXiv preprint arXiv:2407.06169,
-
[10]
11 Liang, Koenig and Fioretto – preprint
doi: 10.1109/LRA.2019.2903261. 11 Liang, Koenig and Fioretto – preprint. Yorai Shaoul, Itamar Mishani, Shivam Vats, Jiaoyang Li, and Maxim Likhachev. Multi-robot motion planning with diffusion models.arXiv preprint arXiv:2410.03072,
-
[11]
Score-Based Generative Modeling through Stochastic Differential Equations
Yang Song, Jascha Sohl-Dickstein, Diederik P Kingma, Abhishek Kumar, Stefano Ermon, and Ben Poole. Score-based generative modeling through stochastic differential equations.arXiv preprint arXiv:2011.13456,
work page internal anchor Pith review Pith/arXiv arXiv 2011
-
[12]
Chase Kew, Dennis Lee, Tsang-Wei Lee, Tingnan Zhang, Brian Ichter, Jie Tan, and Aleksandra Faust
Rose Wang, J. Chase Kew, Dennis Lee, Tsang-Wei Lee, Tingnan Zhang, Brian Ichter, Jie Tan, and Aleksandra Faust. Model-based reinforcement learning for decentralized multiagent rendezvous. In Jens Kober, Fabio Ramos, and Claire Tomlin, editors,Proceedings of the 2020 Conference on Robot Learning, volume 155 ofProceedings of Machine Learning Research, pages...
2020
-
[13]
Adam Wiktor, Dexter Scobee, Sean Messenger, and Christopher Clark
doi: 10.1109/IROS55552.2023.10342305. Adam Wiktor, Dexter Scobee, Sean Messenger, and Christopher Clark. Decentralized and complete multi-robot motion planning in confined spaces. In2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 1168–1175,
-
[14]
Hai Zhu, Francisco Martinez Claramunt, Bruno Brito, and Javier Alonso-Mora
doi: 10.1109/IROS.2014.6942705. Hai Zhu, Francisco Martinez Claramunt, Bruno Brito, and Javier Alonso-Mora. Learning interaction-aware trajectory predictions for decentralized multi-robot motion planning in dynamic environments.IEEE Robotics and Automation Letters, 6(2):2256–2263,
-
[15]
doi: 10.1109/LRA.2021.3061073. Zhengbang Zhu, Minghuan Liu, Liyuan Mao, Bingyi Kang, Minkai Xu, Yong Yu, Stefano Ermon, and Weinan Zhang. Madiff: Offline multi-agent learning with diffusion models.Advances in Neural Information Processing Systems, 37: 4177–4206,
-
[16]
A Implementation Details A.1 Software and Hardware Software used for experiments is Ubuntu 22.04.5, Python 3.8.20, CUDA 12.1, and PyTorch 2.1.2
12 Liang, Koenig and Fioretto – preprint. A Implementation Details A.1 Software and Hardware Software used for experiments is Ubuntu 22.04.5, Python 3.8.20, CUDA 12.1, and PyTorch 2.1.2. For each of our experiments, we used 1 NVIDIA RTX A6000 GPU. A.2 Training Details Our implementation builds upon the official code of Liang et al. [2025a] and Shaoul et a...
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.