From 3D Perception to Safety Reasoning: A Graph-Based Framework for Real-Time Underground Mine Monitoring
Pith reviewed 2026-06-28 10:41 UTC · model grok-4.3
The pith
A graph-based framework lifts underground mine hazard coverage from 57 percent with rules alone to 93 percent when memory and LLM reasoning are added.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that converting 3D perception outputs into explicit scene and temporal graphs, then applying successive layers of rule-based, LLM, and memory-based reasoning, raises hazard coverage from 57 percent to 93 percent across 115 tested scenarios while maintaining real-time performance.
What carries the argument
Scene and temporal graphs that link perception outputs across reasoning stages and serve as the explicit knowledge structure for traceable safety decisions.
If this is right
- Adding contextual LLM reasoning and historical memory allows detection of hazards outside the predefined rule set.
- Uncertainty signals from the perception model flag out-of-distribution objects for further interpretation.
- Self-supervised pretraining plus generated training data enables usable segmentation accuracy despite limited labeled underground examples.
- Graph-structured memory supports longer-term pattern analysis that single-frame rule checks cannot provide.
- The resulting outputs are structured and traceable, supplying direct input for mine decision support systems.
Where Pith is reading between the lines
- The same graph-plus-layered-reasoning pattern could be tested in other confined, low-visibility settings such as tunnels or large warehouses.
- Persistent temporal graphs might eventually support forward prediction of recurring hazard sequences rather than only retrospective analysis.
- Replacing the current 3D sensor with higher-resolution or multi-modal inputs would be a direct next measurement to check whether coverage gains hold under noisier field conditions.
Load-bearing premise
The 115 hazard scenarios created from roadway scans, controlled object placement, and longwall simulation match the distribution and complexity of hazards that actually occur in operating mines.
What would settle it
Deploy the full pipeline on continuous sensor streams from an active underground mine for several shifts and measure whether the fraction of hazards caught stays near 93 percent or falls back toward the 57 percent rule-only level.
Figures
read the original abstract
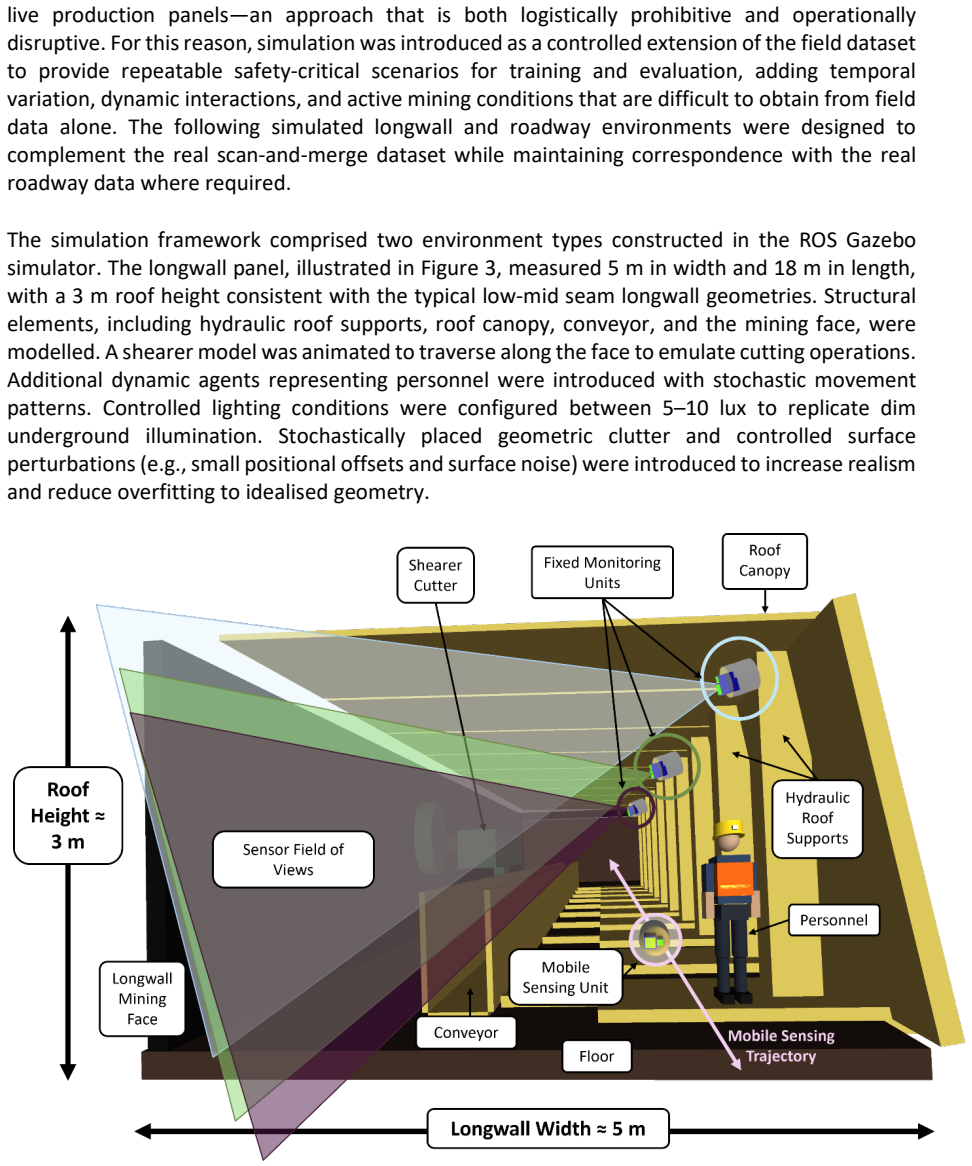
Underground coal mining requires personnel and heavy equipment to operate within shared, confined, and poorly illuminated spaces where hazards such as equipment proximity violations, structural instabilities, and occluded blind spots are difficult to anticipate. Conventional monitoring systems, including fixed cameras and rule-based proximity alerts, can detect predefined events but lack the 3D scene understanding and contextual memory needed to identify complex or evolving hazards. This paper presents a continuous monitoring framework that converts colourised 3D point clouds into structured and traceable safety reasoning outputs. The framework combines 3D semantic perception, uncertainty-based anomaly detection, rule-based hazard checks, on-device LLM reasoning, and GraphRAG -based memory analysis to identify immediate hazards and interpret longer-term safety patterns. Scene and temporal graphs serve as the explicit knowledge structure, linking perception outputs across reasoning stages. To overcome the scarcity of labeled underground data, real roadway scans, controlled object placement, and high-fidelity longwall simulation were combined to generate diverse hazard scenarios, while self-supervised pretraining improved segmentation from limited annotations. The perception model achieved 92.7% accuracy at 30 FPS with low memory usage. Across 115 hazard scenarios, rule-based checks achieved 57% coverage, increasing to 76% with contextual LLM reasoning and 93% with memory-based reasoning using historical records. Qualitative results show uncertainty-derived anomaly signals support the interpretation of out-of-distribution hazards beyond predefined classes. Overall, graph-based knowledge representation combined with 3D perception and layered safety reasoning provides a practical foundation for intelligent decision support in underground mine monitoring.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a continuous monitoring framework that converts colourised 3D point clouds into structured safety reasoning outputs for underground coal mines. It integrates 3D semantic perception (92.7% accuracy at 30 FPS), uncertainty-based anomaly detection, rule-based hazard checks, on-device LLM reasoning, and GraphRAG memory analysis over scene and temporal graphs. To address data scarcity, scenarios are generated from real roadway scans, controlled object placement, and high-fidelity longwall simulation; across 115 such scenarios, coverage rises from 57% (rules) to 76% (LLM) to 93% (memory-augmented).
Significance. If the evaluation holds, the work demonstrates a practical, traceable pipeline that augments conventional monitoring with contextual and historical reasoning, directly addressing blind spots and evolving hazards in confined, low-visibility environments. The self-supervised pretraining and explicit graph knowledge structure are notable strengths for data-limited domains.
major comments (2)
- [Abstract] Abstract (results paragraph): the headline coverage gains (57%/76%/93%) are measured exclusively on 115 generated scenarios; the manuscript supplies no quantitative validation (KL divergence to incident logs, expert realism ratings, or coverage of compound/rare events) that the generation procedure reproduces the joint distribution of real-mine hazards, occlusions, and temporal patterns. This assumption is load-bearing for the claim of practical safety reasoning.
- [Methods (scenario generation)] Scenario-generation description: the combination of real scans, controlled placement, and simulation is presented without reported statistics on parameter ranges, diversity metrics, or explicit handling of distribution shift, leaving the observed reasoning improvements vulnerable to synthetic artifacts.
minor comments (1)
- [Abstract] Abstract: the phrase 'GraphRAG-based memory analysis' would benefit from a one-sentence definition or citation on first use for readers outside the RAG literature.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback. The two major comments both concern the validation and documentation of our synthetic scenario generation procedure. We address each point below and outline the revisions we will make.
read point-by-point responses
-
Referee: [Abstract] Abstract (results paragraph): the headline coverage gains (57%/76%/93%) are measured exclusively on 115 generated scenarios; the manuscript supplies no quantitative validation (KL divergence to incident logs, expert realism ratings, or coverage of compound/rare events) that the generation procedure reproduces the joint distribution of real-mine hazards, occlusions, and temporal patterns. This assumption is load-bearing for the claim of practical safety reasoning.
Authors: We agree that the lack of direct quantitative comparison to real incident distributions is a limitation. Real underground incident logs are scarce, privacy-restricted, and rarely contain the fine-grained 3D annotations needed for KL divergence or compound-event coverage analysis. Our generation pipeline starts from real LiDAR scans of active roadways and uses controlled placement plus physics-based longwall simulation calibrated to observed mine geometry and equipment. To strengthen the manuscript we will (1) add a dedicated subsection reporting parameter ranges, hazard-type entropy, and occlusion statistics across the 115 scenarios, (2) include a limitations paragraph explicitly discussing the absence of real-log validation and the reliance on expert-informed simulation, and (3) report any available qualitative expert feedback on scenario realism. These additions will make the evidential basis transparent without overstating the current evaluation. revision: yes
-
Referee: [Methods (scenario generation)] Scenario-generation description: the combination of real scans, controlled placement, and simulation is presented without reported statistics on parameter ranges, diversity metrics, or explicit handling of distribution shift, leaving the observed reasoning improvements vulnerable to synthetic artifacts.
Authors: We accept this criticism. The current Methods section describes the three data sources at a high level but omits numerical ranges and diversity measures. In the revision we will insert a table listing the ranges for object placement distances, lighting conditions, equipment types, and temporal evolution parameters, together with computed diversity metrics (e.g., Shannon entropy over hazard categories and average scene-graph node/edge counts). We will also add a short paragraph on steps taken to mitigate distribution shift, including the use of real-scan geometry as the base and the injection of sensor noise models derived from our own field recordings. These changes directly respond to the request for explicit statistics and shift handling. revision: yes
Circularity Check
No circularity: empirical coverage metrics on generated scenarios are independent measurements.
full rationale
The paper reports coverage percentages (57/76/93%) as direct empirical counts of hazard detection success across a fixed set of 115 generated scenarios. No equations, fitted parameters, or self-referential definitions are present that would make these outputs reduce to the inputs by construction. The scenario generation procedure (real scans + controlled placement + simulation) is described as a data-creation step, not as a tuning process whose outputs are then relabeled as predictions. No load-bearing self-citations or uniqueness theorems are invoked to justify the core results. The derivation chain is therefore self-contained as straightforward measurement on held-out synthetic cases.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Results 3.1 Semantic Detection Performance The proposed sparse 3D Minkowski UNet was trained using the two -stage strategy described in the methodology, consisting of self -supervised contrastive pretraining on the designated pretraining pool followed by supervised fine -tuning on the annotated training subset . The annotated subset spans three distinct a...
-
[2]
Discussion The results show that the proposed framework improves underground monitoring at both the perception and reasoning levels. At the perception stage, the sparse Minkowski UNet with contrastive pretraining achieves 0.86 mIoU and 92.7% overall accuracy, outperforming both the 46 widely used PointNet++ baseline and the more recent Point Transformer V...
2017
-
[3]
The results show that this approach extends mon itoring beyond conventional detection-based systems toward more context-aware safety interpretation
Conclusion This paper presented a unified perception -to-reasoning framework for autonomous safety monitoring in underground mining, combining 3D perception and graph-based reasoning within a single operational pipeline. The results show that this approach extends mon itoring beyond conventional detection-based systems toward more context-aware safety int...
-
[4]
This demonstrates that sensing, perception, and reasoning can be integrated without treating them as separate monitoring stages
The study developed and evaluated a complete monitoring framework that connects colourised 3D sensing, semantic perception, graph -based representation, rule -based checks, on-device LLM reasoning, and historical retrieval within one continuous pipeline. This demonstrates that sensing, perception, and reasoning can be integrated without treating them as s...
-
[5]
This provides a realistic pathway for developing and testing 3D perception systems when repeated access to active production panels is not feasible
The study established a practical data strategy for restricted underground environments by combining real roadway scans, controlled object placement, and simulated longwall scenes. This provides a realistic pathway for developing and testing 3D perception systems when repeated access to active production panels is not feasible
-
[6]
Contrastive self-supervised pretraining followed by supervised fine- tuning achieved 0.86 mIoU and 92.7% overall accuracy while operating at 30.2 FPS wi th a 94 MB memory footprint
The data -efficient 3D perception approach improved segmentation performance under limited labelled data. Contrastive self-supervised pretraining followed by supervised fine- tuning achieved 0.86 mIoU and 92.7% overall accuracy while operating at 30.2 FPS wi th a 94 MB memory footprint
-
[7]
The uncertainty- aware anomaly detection method helped identify hazards beyond predefined semantic classes. By using per -voxel predictive entropy, the system located uncertain regions and generated anomaly proposals, with qualitative results showing that these cues can support interpretation of previously unlabelled structural conditions in real undergro...
-
[8]
Detected objects and anomaly proposals were represented as graph nodes and linked across time to capture distance, proximity, uncertainty, motion, and evolving interactions
The scene and temporal graph representation provided a compact bridge between perception outputs and safety reasoning. Detected objects and anomaly proposals were represented as graph nodes and linked across time to capture distance, proximity, uncertainty, motion, and evolving interactions
-
[9]
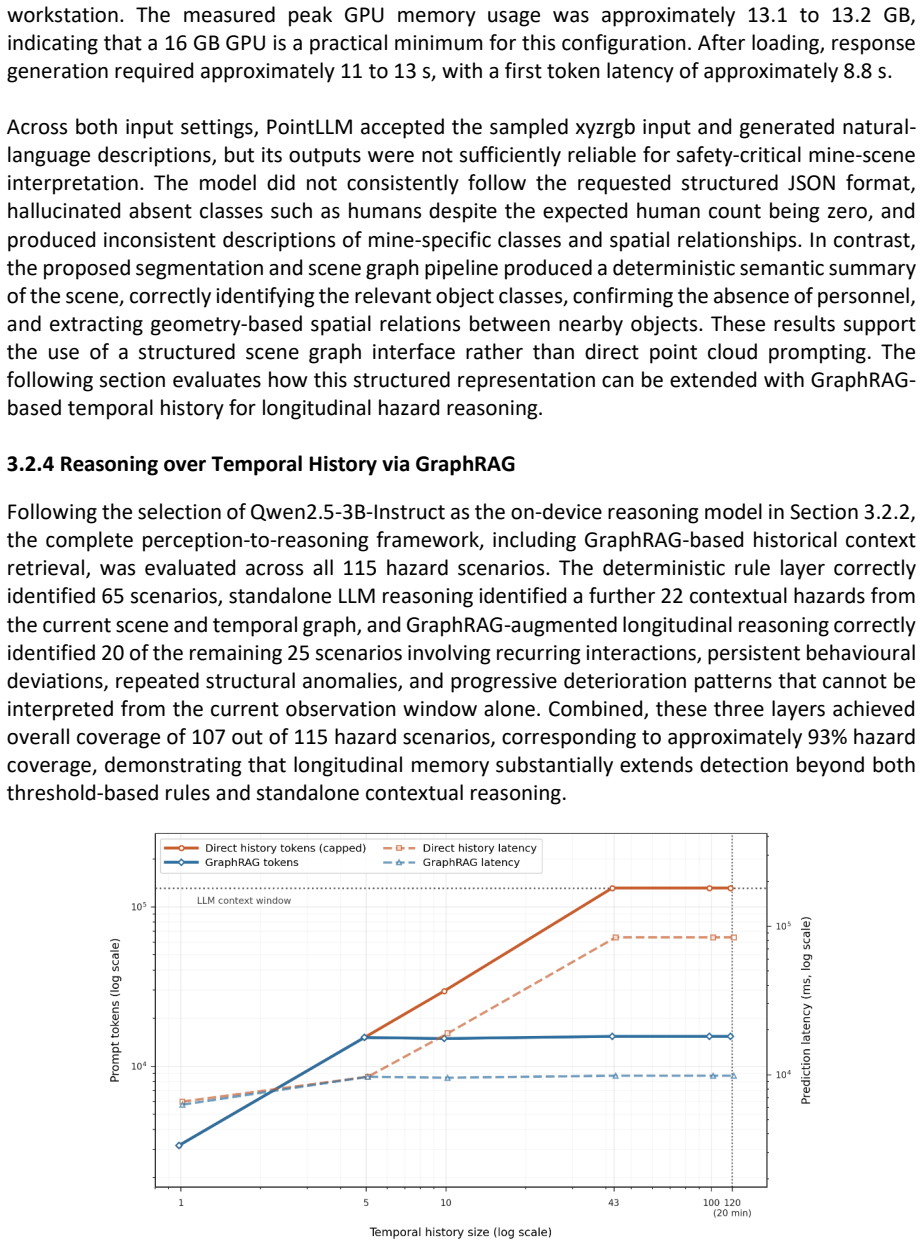
The hybrid reasoning layer improved both current and historical hazard interpretation. Rule-based checks detected explicit safety violations, on -device LLM reasoning increased hazard coverage from 57% to 76%, and GraphRAG-based retrieval further increased overall coverage to approximately 93% across 115 evaluated scenarios. Overall, the study demonstrate...
2022
-
[10]
V. Sakinala, P. S. Paul, and Y. Fissha, "Promoting safety of underground machinery operators through participatory ergonomics and fuzzy model analysis to foster sustainable mining practices," Scientific Reports, vol. 14, no. 1, 2024, doi: 10.1038/s41598-024-67375-1
-
[11]
M. Imam et al., "The Future of Mine Safety: A Comprehensive Review of Anti-Collision Systems Based on Computer Vision in Underground Mines," Sensors, vol. 23, no. 9, p. 4294, 2023, doi: 10.3390/s23094294
-
[12]
Survey of Collision Avoidance Systems for Underground Mines: Sensing Protocols,
M. Qian, K. Zhao, B. Li, H. Gong, and A. Seneviratne, "Survey of Collision Avoidance Systems for Underground Mines: Sensing Protocols," Sensors, vol. 22, no. 19, p. 7400, 2022, doi: 10.3390/s22197400
-
[13]
G. Su and E. Hu, "Research on coal mine safety risk evolution and key hidden dangers under the perspective of complex network," Scientific Reports, vol. 14, no. 1, 2024, doi: 10.1038/s41598-024-71004-2
-
[14]
Worker dies in Central Queensland mine following roof collapse
N. Hammond. "Worker dies in Central Queensland mine following roof collapse." ABC News. https://www.abc.net.au/news/2026-01-03/qld-curragh-mine-mammoth- underground-collapse-rescue/106196192 (accessed 12 Feb 2026
-
[15]
P. Xu, Z. Zhou, and Z. Geng, "Safety monitoring method of moving target in underground coal mine based on computer vision processing," Scientific Reports, vol. 12, no. 1, 2022, doi: 10.1038/s41598-022-22564-8
-
[16]
M. Dunn, P. Reid, and J. Malos, "Development of a Protective Enclosure for Remote Sensing Applications— Case Study: Laser Scanning in Underground Coal Mines," Resources, vol. 9, no. 5, p. 56, 2020, doi: 10.3390/resources9050056. 51
-
[17]
LiDAR Point Cloud Colourisation Using Multi-Camera Fusion and Low-Light Image Enhancement,
P. Ranasinghe, D. Patra, B. Banerjee, and S. Raval, "LiDAR Point Cloud Colourisation Using Multi-Camera Fusion and Low-Light Image Enhancement," Sensors, vol. 25, no. 21, p. 6582, 2025, doi: 10.3390/s25216582
-
[18]
Z. Ren and L. Wang, "Accurate Real-Time Localization Estimation in Underground Mine Environments Based on a Distance-Weight Map (DWM)," Sensors, vol. 22, no. 4, p. 1463, 2022, doi: 10.3390/s22041463
-
[19]
Camera and LIDAR Fusion for Mapping of Actively Illuminated Subterranean Voids,
U. Wong, B. Garney, W. Whittaker, and R. Whittaker, "Camera and LIDAR Fusion for Mapping of Actively Illuminated Subterranean Voids," Springer Berlin Heidelberg, 2010, pp. 421-430
2010
-
[20]
Integrated Sensing System for Colourised Three-Dimensional Monitoring Through Enclosure,
S. Raval, P. Ranasinghe, and B. Banerjee, "Integrated Sensing System for Colourised Three-Dimensional Monitoring Through Enclosure," Australia Patent Appl. 2026902579, 2026
2026
-
[21]
P. Ranasinghe, B. P. Banerjee, and S. Raval. (2026). Development and Validation of an Integrated LiDAR-Camera System for Real-Time Monitoring of Underground Longwall Operations. Available: https://arxiv.org/abs/2605.02516
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[22]
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation,
C. Ruizhongtai Qi, H. Su, K. Mo, and L. Guibas, "PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation," 12/02 2016
2016
-
[23]
PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space,
C. Ruizhongtai Qi, L. Yi, H. Su, and L. Guibas, "PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space," 06/07 2017
2017
-
[24]
Point Transformer,
H. Zhao, L. Jiang, J. Jia, P. H. S. Torr, and V. Koltun, "Point Transformer," 2021 IEEE/CVF International Conference on Computer Vision (ICCV), pp. 16239-16248, 2020
2021
-
[25]
4D Spatio-Temporal ConvNets: Minkowski Convolutional Neural Networks,
C. B. Choy, J. Gwak, and S. Savarese, "4D Spatio-Temporal ConvNets: Minkowski Convolutional Neural Networks," 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 3070-3079, 2019
2019
-
[26]
S. K. Singh, S. Raval, and B. Banerjee, "A robust approach to identify roof bolts in 3D point cloud data captured from a mobile laser scanner," Int. J. Min. Sci. Technol., vol. 31, no. 2, pp. 303-312, 2021/03/01/ 2021, doi: https://doi.org/10.1016/j.ijmst.2021.01.001
-
[27]
A Coal Mine Tunnel Deformation Detection Method Using Point Cloud Data,
J. Kang, M. Li, S. Mao, Y. Fan, Z. Wu, and B. Li, "A Coal Mine Tunnel Deformation Detection Method Using Point Cloud Data," Sensors, vol. 24, no. 7, p. 2299, 2024, doi: 10.3390/s24072299
-
[28]
LiDAR SLAM with a Wheel Encoder in a Featureless Tunnel Environment,
I. Filip, J. Pyo, M. Lee, and H. Joe, "LiDAR SLAM with a Wheel Encoder in a Featureless Tunnel Environment," Electronics (Switzerland), Article vol. 12, no. 4, 2023, Art no. 1002, doi: 10.3390/electronics12041002
-
[29]
A Deep Learning Approach to Identify Rock Bolts in Complex 3D Point Clouds of Underground Mines Captured Using Mobile Laser Scanners,
D. Patra, P. Ranasinghe, B. Banerjee, and S. Raval, "A Deep Learning Approach to Identify Rock Bolts in Complex 3D Point Clouds of Underground Mines Captured Using Mobile Laser Scanners," Remote Sens., vol. 17, no. 15, p. 2701, 2025. [Online]. Available: https://www.mdpi.com/2072-4292/17/15/2701
2025
-
[30]
P. Zhao et al., "An open paradigm dataset for intelligent monitoring of underground drilling operations in coal mines," Scientific Data, vol. 12, no. 1, 2025, doi: 10.1038/s41597-025-05118-1
-
[31]
What Uncertainties Do We Need in Bayesian Deep Learning for Computer Vision?
A. Kendall and Y. Gal, "What Uncertainties Do We Need in Bayesian Deep Learning for Computer Vision?," ArXiv, vol. abs/1703.04977, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[32]
Simple and Scalable Predictive Uncertainty Estimation using Deep Ensembles,
B. Lakshminarayanan, A. Pritzel, and C. Blundell, "Simple and Scalable Predictive Uncertainty Estimation using Deep Ensembles," in Neural Information Processing Systems, 2016. 52
2016
-
[33]
Investigation of out-of-distribution detection across various models and training methodologies,
B. C. Kim, B. Kim, and Y. Hyun, "Investigation of out-of-distribution detection across various models and training methodologies," Neural Networks, vol. 175, p. 106288, 2024/07/01/ 2024, doi: https://doi.org/10.1016/j.neunet.2024.106288
-
[34]
A Simple Framework for Robust Out-of-Distribution Detection,
Y. Hur, E. Yang, and S. J. Hwang, "A Simple Framework for Robust Out-of-Distribution Detection," IEEE Access, vol. 10, pp. 23086-23097, 2022, doi: 10.1109/ACCESS.2022.3153723
-
[35]
Learning 3D Semantic Scene Graphs From 3D Indoor Reconstructions,
J. Wald, H. Dhamo, N. Navab, and F. Tombari, "Learning 3D Semantic Scene Graphs From 3D Indoor Reconstructions," 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 3960-3969, 2020
2020
-
[36]
Kimera: From SLAM to spatial perception with 3D dynamic scene graphs,
A. Rosinol et al., "Kimera: From SLAM to spatial perception with 3D dynamic scene graphs," The International Journal of Robotics Research, vol. 40, pp. 1510 - 1546, 2021
2021
-
[37]
The Hungarian method for the assignment problem,
H. W. Kuhn, "The Hungarian method for the assignment problem," Naval Research Logistics Quarterly, vol. 2, no. 1-2, pp. 83-97, 1955/03/01 1955, doi: https://doi.org/10.1002/nav.3800020109
-
[38]
Ab3dmot: A baseline for 3d multi-object tracking and new evaluation metrics,
X. Weng, J. Wang, D. Held, and K. Kitani, "AB3DMOT: A Baseline for 3D Multi-Object Tracking and New Evaluation Metrics," ArXiv, vol. abs/2008.08063, 2020
-
[39]
Constructing a Coal Mine Safety Knowledge Graph to Promote the Association and Reuse of Risk Management Empirical Knowledge,
J. Zhang et al., "Constructing a Coal Mine Safety Knowledge Graph to Promote the Association and Reuse of Risk Management Empirical Knowledge," Sustainability, vol. 16, no. 20, p. 8848, 2024. [Online]. Available: https://www.mdpi.com/2071- 1050/16/20/8848
2024
-
[40]
X. Zhu, Y. Xie, Y. Liu, Y. Li, and W. Hu, Knowledge Graph-Guided Retrieval Augmented Generation. 2025, pp. 8912-8924
2025
-
[41]
ReGraphRAG: Reorganizing Fragmented Knowledge Graphs for Multi-Perspective Retrieval-Augmented Generation,
S. Kim, S. J. Hwang, J.-H. Kim, J. Park, and Y. S. Choi, "ReGraphRAG: Reorganizing Fragmented Knowledge Graphs for Multi-Perspective Retrieval-Augmented Generation," in Conference on Empirical Methods in Natural Language Processing, 2025
2025
-
[42]
Retrieval-Augmented Generation for Knowledge-Intensive NLP Tasks
P. Lewis et al., "Retrieval-Augmented Generation for Knowledge-Intensive NLP Tasks," ArXiv, vol. abs/2005.11401, 2020
work page internal anchor Pith review Pith/arXiv arXiv 2005
-
[43]
Communication of Sensor Data in Underground Mining Environments: An Evaluation of Wireless Signal Quality over Distance,
H. Ikeda, O. Kolade, M. A. Mahboob, F. T. Cawood, and Y. Kawamura, "Communication of Sensor Data in Underground Mining Environments: An Evaluation of Wireless Signal Quality over Distance," Mining, vol. 1, no. 2, pp. 211-223, 2021. [Online]. Available: https://www.mdpi.com/2673-6489/1/2/14
2021
-
[44]
Elmahallawy, S
M. Elmahallawy, S. Madria, and S. Frimpong, Secure and Privacy-Preserving Federated Learning for Next-Generation Underground Mine Safety. 2025
2025
-
[45]
PointLLM: Empowering Large Language Models to Understand Point Clouds,
R. Xu, X. Wang, T. Wang, Y. Chen, J. Pang, and D. Lin, "PointLLM: Empowering Large Language Models to Understand Point Clouds," ArXiv, vol. abs/2308.16911, 2023
-
[46]
ShapeLLM: Universal 3D Object Understanding for Embodied Interaction,
Z. Qi et al., "ShapeLLM: Universal 3D Object Understanding for Embodied Interaction," in European Conference on Computer Vision, 2024
2024
-
[47]
Y. Sun and F. Ji, "An Embodied Intelligence System for Coal Mine Safety Assessment Based on Multi-Level Large Language Models," Sensors, vol. 25, no. 2, p. 488, 2025, doi: 10.3390/s25020488
-
[48]
Correcting Time Offsets and Enclosure-Induced Measurement Distortions in LiDAR–Camera Systems,
P. Ranasinghe et al., "Correcting Time Offsets and Enclosure-Induced Measurement Distortions in LiDAR–Camera Systems," SSRN Electronic Journal, 2026, doi: 10.2139/ssrn.6143992
-
[49]
Determination of Accuracy and Usability of a SLAM Scanner GeoSLAM Zeb Horizon: A Bridge Structure Case 53 Study,
R. Urban, M. Štroner, J. Braun, T. Suk, Ľ. Kovanič, and P. Blistan, "Determination of Accuracy and Usability of a SLAM Scanner GeoSLAM Zeb Horizon: A Bridge Structure Case 53 Study," Applied Sciences, vol. 14, no. 12, p. 5258, 2024. [Online]. Available: https://www.mdpi.com/2076-3417/14/12/5258
2024
-
[50]
FAST-LIVO2: Fast, Direct LiDAR–Inertial–Visual Odometry,
C. Zheng et al., "FAST-LIVO2: Fast, Direct LiDAR–Inertial–Visual Odometry," IEEE Transactions on Robotics, vol. 41, pp. 326-346, 2024
2024
-
[51]
A Simple Framework for Contrastive Learning of Visual Representations,
T. Chen, S. Kornblith, M. Norouzi, and G. Hinton, "A Simple Framework for Contrastive Learning of Visual Representations," presented at the Proceedings of the 37th International Conference on Machine Learning, Proceedings of Machine Learning Research, 2020. [Online]. Available: https://proceedings.mlr.press/v119/chen20j.html
2020
-
[52]
Adam: A Method for Stochastic Optimization
D. P. Kingma and J. Ba, "Adam: A Method for Stochastic Optimization," CoRR, vol. abs/1412.6980, 2014
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[53]
SGDR: Stochastic Gradient Descent with Restarts,
I. Loshchilov and F. Hutter, "SGDR: Stochastic Gradient Descent with Restarts," 08/01 2016
2016
-
[54]
A density-based algorithm for discovering clusters in large spatial databases with noise,
M. Ester, H.-P. Kriegel, J. Sander, and X. Xu, "A density-based algorithm for discovering clusters in large spatial databases with noise," presented at the Proceedings of the Second International Conference on Knowledge Discovery and Data Mining, Portland, Oregon, 1996
1996
-
[55]
The Approach of Matching Problem in Assignment Problem,
L. Ulhas Baban, M. Prashant P., V. S. Madanlal, and D. Surekha, "The Approach of Matching Problem in Assignment Problem," International Journal of Innovative Science and Research Technology, 2025
2025
-
[56]
Proximity Detection Zones: Designs to Prevent Fatalities Around Continuous Mining Machines,
P. T. Bissert, J. L. Carr, and J. P. DuCarme, "Proximity Detection Zones: Designs to Prevent Fatalities Around Continuous Mining Machines," (in eng), Prof Saf, vol. 61, no. 6, pp. 72- 77, Jun 2016
2016
-
[57]
Q. A. Yang et al., "Qwen2.5 Technical Report," ArXiv, vol. abs/2412.15115, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[58]
Phi-4-Mini Technical Report: Compact yet Powerful Multimodal Language Models via Mixture-of-LoRAs
A. Abouelenin et al., "Phi-4-Mini Technical Report: Compact yet Powerful Multimodal Language Models via Mixture-of-LoRAs," ArXiv, vol. abs/2503.01743, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[59]
DeepSeek-R1: Incentivizing Reasoning Capability in LLMs via Reinforcement Learning
A. Suma and S. Dauncey, "DeepSeek-R1: Incentivizing Reasoning Capability in LLMs via Reinforcement Learning," ArXiv, vol. abs/2501.12948, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[60]
Retrieval-Augmented Generation with Graphs (GraphRAG)
H. Han et al., "Retrieval-Augmented Generation with Graphs (GraphRAG)," ArXiv, vol. abs/2501.00309, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[61]
LlamaIndex. (2022). Zenodo. [Online]. Available: https://github.com/jerryjliu/llama_index
2022
-
[62]
Exploring Distributed Vector Databases Performance on HPC Platforms: A Study with Qdrant,
S. Ockerman et al., "Exploring Distributed Vector Databases Performance on HPC Platforms: A Study with Qdrant," SC25-W: Workshops of the International Conference for High Performance Computing, Networking, Storage and Analysis, pp. 575-581, 2025
2025
-
[63]
Qwen3 Embedding: Advancing Text Embedding and Reranking Through Foundation Models
Y. Zhang et al., "Qwen3 Embedding: Advancing Text Embedding and Reranking Through Foundation Models," ArXiv, vol. abs/2506.05176, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[64]
RankRAG: Unifying Context Ranking with Retrieval-Augmented Generation in LLMs,
Y. Yu et al., "RankRAG: Unifying Context Ranking with Retrieval-Augmented Generation in LLMs," ArXiv, vol. abs/2407.02485, 2024
-
[65]
Point Transformer V3: Simpler, Faster, Stronger,
X. Wu et al., "Point Transformer V3: Simpler, Faster, Stronger," ArXiv, vol. abs/2312.10035, 2023
-
[66]
International Electrotechnical Commission (IEC), IEC System for Certification to Standards Relating to Equipment for Use in Explosive Atmospheres, Geneva, Switzerland: IEC, 2014
2014
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.