Delayed Verification Destabilizes Multi-Agent LLM Belief: Instability Thresholds and Optimal Corrector Placement
Pith reviewed 2026-06-29 01:23 UTC · model grok-4.3
The pith
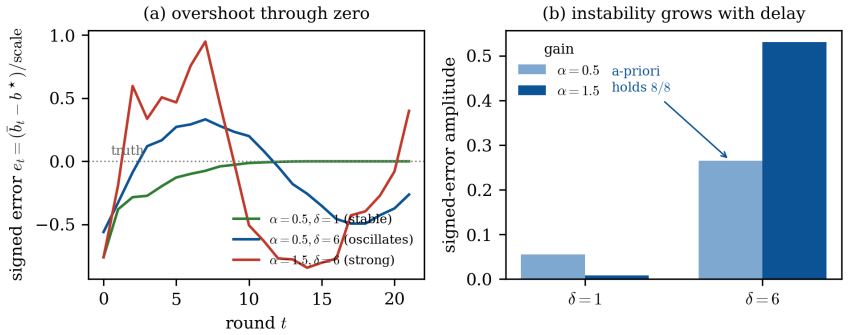
Delayed verification in multi-agent LLM systems turns consensus into oscillations when correction exceeds a delay-dependent threshold.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
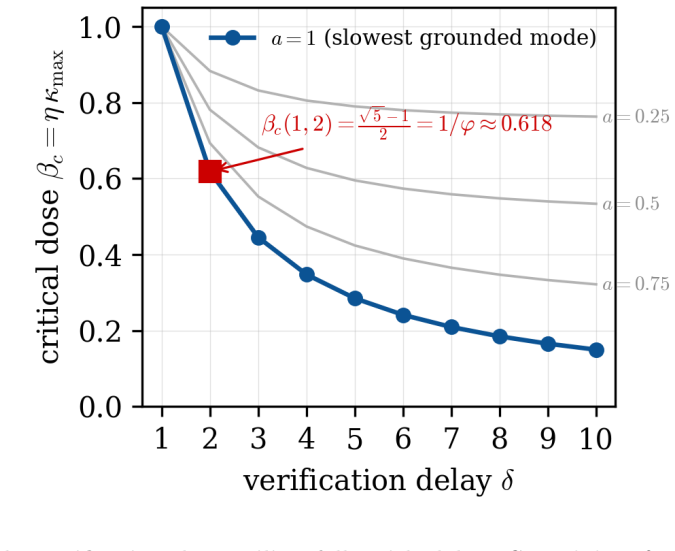
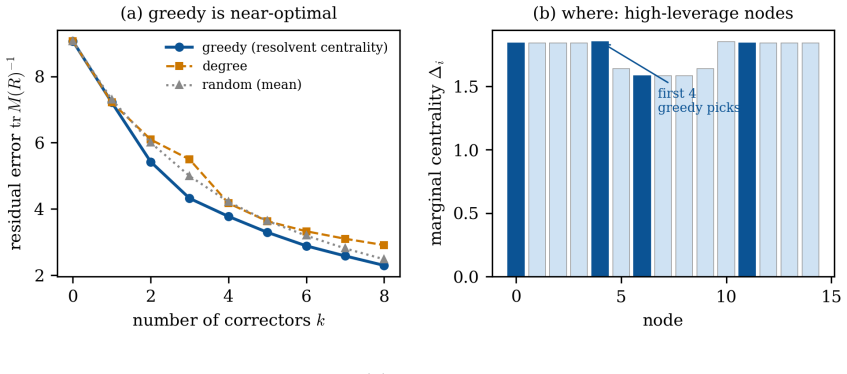
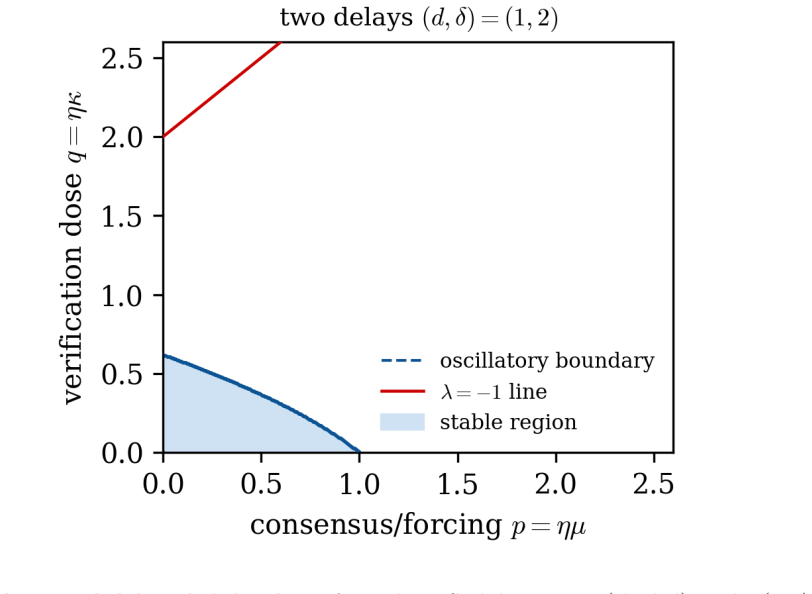
Delayed consensus on a graph with grounded corrector nodes yields a stability threshold for the verification dose via spectral analysis of the grounded Laplacian. The most unstable regime occurs when communication and verification delays match; for delay two the threshold is the inverse golden ratio. The same model supplies a supermodular placement objective and a greedy (1-1/e)-approximation for allocating a limited corrector budget.
What carries the argument
Delayed consensus dynamics on a graph with grounded corrector nodes, whose stability thresholds are obtained by spectral decomposition of the grounded Laplacian.
If this is right
- Verification dose must remain below the delay-matched threshold to preserve consensus.
- Corrector nodes should be placed via the supermodular objective and its (1-1/e) greedy rule to maximize stabilization per unit budget.
- The oscillation effect appears only in signed-belief tasks and vanishes under grounded factual answering.
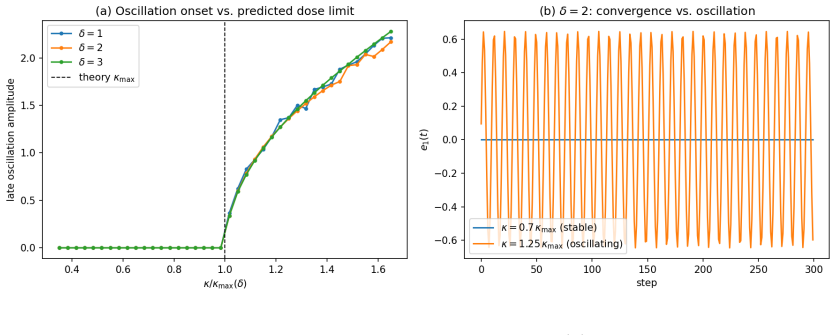
- Experiments across five open models already exhibit the predicted dose-delay oscillations.
Where Pith is reading between the lines
- Designers of multi-agent systems should prioritize shortening verification latency rather than raising correction strength.
- The same delay-consensus model may describe instability in other delayed-feedback networks such as distributed sensor fusion or social opinion dynamics.
- Varying graph topology while holding delays fixed would test whether the inverse-golden-ratio threshold changes with network structure.
Load-bearing premise
Multi-agent LLM belief dynamics are accurately captured by delayed consensus on a graph whose stability is fixed by the spectral properties of the grounded Laplacian.
What would settle it
Run a multi-agent LLM network with communication delay two and verification delay two; increase verification dose past the inverse golden ratio and check whether belief trajectories switch from convergence to sustained oscillation.
Figures
read the original abstract
Multi-agent large language model (LLM) systems often rely on verifier and critic agents to suppress hallucinations, but verification is delayed. During this delay, false claims can propagate through the agent network. We model this process as delayed consensus on a graph with grounded corrector nodes. Spectral decomposition by the grounded Laplacian yields a closed-form stability threshold for the verification dose: correction that is too strong or too delayed can turn consensus into oscillation. The most unstable regime occurs when the communication and verification delays coincide; for delay two, the threshold is the inverse golden ratio. The same framework gives a supermodular placement objective and a greedy (1-1/e)-approximation rule for assigning a limited corrector budget to influential nodes. Experiments across five open models confirm the predicted dose-delay oscillations. By contrast, grounded factual answering makes truth an absorbing boundary and eliminates the effect, suggesting that the instability is specific to signed-belief tasks while grounded verification remains stabilizing
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper models multi-agent LLM belief dynamics as delayed consensus on a graph with grounded corrector nodes. Spectral decomposition of the grounded Laplacian yields closed-form stability thresholds for the verification dose, with the most unstable regime occurring when communication and verification delays coincide (inverse golden ratio threshold for delay two). It also derives a supermodular placement objective for limited corrector budgets with a greedy (1-1/e)-approximation algorithm. Experiments across five open models confirm the predicted dose-delay oscillations, while grounded factual answering makes truth absorbing and eliminates the instability, indicating it is specific to signed-belief tasks.
Significance. If the linear delayed-consensus model provides a useful approximation to LLM belief updates, the work supplies a rigorous theoretical framework for stability analysis in multi-agent LLM systems together with practical placement rules. The closed-form thresholds, supermodular guarantee, and empirical confirmation across multiple models are clear strengths; the distinction between signed-belief and grounded tasks is also insightful.
major comments (2)
- [§3] §3 (model formulation): the reduction of LLM belief updates to linear delayed consensus on a grounded graph is load-bearing for all closed-form thresholds, including the inverse golden ratio result. LLM token sampling, context truncation, and prompt-dependent non-linearities are not shown to be negligible; without quantitative bounds on the approximation error, the spectral thresholds lose predictive force for actual systems even if the mathematics inside the model is correct.
- [§5] §5 (experiments): the reported confirmation of 'dose-delay oscillations' is qualitative. No table or figure directly compares the observed transition points against the predicted thresholds (e.g., inverse golden ratio for delay two), so it remains unclear whether the quantitative predictions of the spectral analysis are supported or only the existence of instability.
minor comments (2)
- [Abstract] The abstract states results for 'delay two' but does not define the delay parameters or the precise form of the delayed consensus equation; a short explicit statement in the introduction would improve accessibility.
- [Notation] Notation for the grounded Laplacian and the verification dose parameter should be introduced once in the main text rather than only in the appendix to reduce cross-referencing.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. Below we address each major comment point by point, providing the strongest honest defense of the work while agreeing where revisions are warranted.
read point-by-point responses
-
Referee: §3 (model formulation): the reduction of LLM belief updates to linear delayed consensus on a grounded graph is load-bearing for all closed-form thresholds, including the inverse golden ratio result. LLM token sampling, context truncation, and prompt-dependent non-linearities are not shown to be negligible; without quantitative bounds on the approximation error, the spectral thresholds lose predictive force for actual systems even if the mathematics inside the model is correct.
Authors: We acknowledge that the linear delayed-consensus model is an abstraction and that the manuscript does not supply quantitative bounds on approximation error arising from token sampling, truncation, or prompt-dependent nonlinearities. The paper's contribution is the derivation of closed-form stability thresholds and placement rules under this model, together with empirical evidence that the predicted qualitative phenomena (dose-delay oscillations) appear consistently across five LLM systems. This supports the model as a useful first-order description for instability analysis, even if it is not a high-fidelity simulator. We will add an explicit limitations subsection discussing the scope of the linear approximation in the revised manuscript. revision: partial
-
Referee: §5 (experiments): the reported confirmation of 'dose-delay oscillations' is qualitative. No table or figure directly compares the observed transition points against the predicted thresholds (e.g., inverse golden ratio for delay two), so it remains unclear whether the quantitative predictions of the spectral analysis are supported or only the existence of instability.
Authors: The experiments were designed to test whether the instability regimes and oscillatory behavior predicted by the spectral analysis manifest in real multi-agent LLM systems. Because of stochastic sampling, we focused on qualitative confirmation of the dose-delay dependence rather than precise numerical threshold matching. We agree that a direct quantitative comparison would strengthen validation of the closed-form results. In revision we will add a table or supplementary figure that reports observed transition points for the tested delay values and compares them to the theoretical thresholds (including the inverse golden ratio for delay two). revision: yes
Circularity Check
No circularity: stability threshold derived from standard spectral analysis of modeled dynamics
full rationale
The paper models LLM belief as delayed consensus on a grounded graph and applies spectral decomposition of the grounded Laplacian to obtain closed-form stability thresholds (including the inverse golden ratio for coincident delays of two). This is a direct mathematical consequence of the linear delay system characteristic equation under the stated model assumptions, not a fit, self-definition, or reduction to prior self-citations. The abstract and claimed derivation chain contain no fitted inputs renamed as predictions, no load-bearing self-citations, and no ansatz smuggled via citation. Experiments are presented as external confirmation rather than the source of the threshold. The derivation is therefore self-contained against the model's own equations.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Multi-agent LLM belief propagation can be modeled as delayed consensus on a graph with grounded corrector nodes.
- standard math Spectral decomposition of the grounded Laplacian yields closed-form stability thresholds.
Reference graph
Works this paper leans on
-
[1]
L. Yao, A. Li. Convergence of time-delayed opinion dynamics with complex interaction types. arXiv:2501.12219 (2025)
arXiv 2025
-
[2]
S. Jamshidi, A. Moradi Dakhel, K. W. Nafi, F. Khomh. Hallucination cascade: analyzing error propagation in multi-agent LLM systems. arXiv:2606.07937 (2026)
Pith/arXiv arXiv 2026
-
[3]
S. Jamshidi. Collective hallucination in multi-agent LLMs: modeling and defense. arXiv:2606.07941 (2026)
Pith/arXiv arXiv 2026
-
[4]
Y. Xie et al. From spark to fire: modeling and mitigating error cascades in LLM-based multi-agent collaboration. arXiv:2603.04474 (2026)
Pith/arXiv arXiv 2026
-
[5]
Z. Liu. Contagion networks: evaluator bias propagation in multi-agent LLM systems. arXiv:2606.20493 (2026)
Pith/arXiv arXiv 2026
-
[6]
B. Yan et al. PropGuard: safeguarding LLM-MAS via propagation-aware exploration and remediation. arXiv:2605.16346 (2026)
Pith/arXiv arXiv 2026
- [7]
-
[8]
A. Madaan et al. Self-Refine: iterative refinement with self-feedback. NeurIPS 2023. arXiv:2303.17651
Pith/arXiv arXiv 2023
- [9]
-
[10]
Y. Du, S. Li, A. Torralba, J. B. Tenenbaum, I. Mordatch. Improving factuality and reasoning in language models through multiagent debate. ICML 2024. arXiv:2305.14325
Pith/arXiv arXiv 2024
-
[11]
J. C.-Y. Chen, S. Saha, M. Bansal. ReConcile: round-table conference improves reasoning via consensus among diverse LLMs. ACL 2024. arXiv:2309.13007
arXiv 2024
-
[12]
Liang et al
T. Liang et al. Encouraging divergent thinking in LLMs through multi-agent debate. EMNLP
-
[13]
H. K. Choi, X. Zhu, S. Li. Debate or vote: which yields better decisions in multi-agent LLMs? NeurIPS 2025. arXiv:2508.17536. 15
arXiv 2025
-
[14]
A. Wynn, H. Satija, G. Hadfield. Talk isn’t always cheap: understanding failure modes in multi-agent debate. ICML 2025 MAS Workshop. arXiv:2509.05396
arXiv 2025
- [15]
-
[16]
X. Liu, X. Yang, Z. Li, P. Li, R. He. AgentHallu: benchmarking automated hallucination attribution of LLM-based agents. arXiv:2601.06818 (2026)
arXiv 2026
-
[17]
S. Zhang et al. Which agent causes task failures and when? On automated failure attribution of LLM multi-agent systems. ICML 2025. arXiv:2505.00212
arXiv 2025
-
[18]
D. Deshpande et al. TRAIL: trace reasoning and agentic issue localization. arXiv:2505.08638 (2025)
arXiv 2025
-
[19]
B. Zhang et al. AgentForesight: online auditing for early failure prediction in multi-agent systems. arXiv:2605.08715 (2026)
Pith/arXiv arXiv 2026
-
[20]
K. Venkatesh, J. Isbarov, S. Amin, M. Kantarcioglu, J. Cui. CASPIAN: online detection and attribution of cascade attacks in LLM multi-agent systems via cross-channel causal monitoring. arXiv:2605.19240 (2026)
Pith/arXiv arXiv 2026
-
[21]
J. Zhou, L. Wang, X. Yang. GUARDIAN: safeguarding LLM multi-agent collaborations with temporal graph modeling. NeurIPS 2025. arXiv:2505.19234
arXiv 2025
-
[22]
L. Kuhn, Y. Gal, S. Farquhar. Semantic uncertainty: linguistic invariances for uncertainty estimation in NLG. ICLR 2023. arXiv:2302.09664
Pith/arXiv arXiv 2023
-
[23]
P. Manakul, A. Liusie, M. J. F. Gales. SelfCheckGPT: zero-resource black-box hallucination detection for generative LLMs. EMNLP 2023. arXiv:2303.08896
Pith/arXiv arXiv 2023
-
[24]
L. Huang et al. A survey on hallucination in large language models. ACM TOIS (2025). doi:10.1145/3703155. arXiv:2311.05232
work page internal anchor Pith review Pith/arXiv arXiv doi:10.1145/3703155 2025
-
[25]
E. S. Page. Continuous inspection schemes.Biometrika41 (1954) 100–115
1954
-
[26]
G. Lorden. Procedures for reacting to a change in distribution.Ann. Math. Statist.42 (1971) 1897–1908
1971
-
[27]
M. Pollak. Optimal detection of a change in distribution.Ann. Statist.13 (1985) 206–227
1985
-
[28]
G. V. Moustakides. Optimal stopping times for detecting changes in distributions.Ann. Statist. 14 (1986) 1379–1387
1986
-
[29]
T. L. Lai. Information bounds and quick detection of parameter changes in stochastic systems. IEEE Trans. Inf. Theory44 (1998) 2917–2929
1998
-
[30]
V. V. Veeravalli, T. Banerjee. Quickest change detection. InAcademic Press Library in Signal Processing3 (2013) 209–255. arXiv:1210.5552
Pith/arXiv arXiv 2013
-
[31]
L. Xie, S. Zou, Y. Xie, V. V. Veeravalli. Sequential (quickest) change detection: classical results and new directions.IEEE J. Sel. Areas Inf. Theory2 (2021) 494–514. arXiv:2104.04186. 16
arXiv 2021
-
[32]
Tartakovsky, I
A. Tartakovsky, I. Nikiforov, M. Basseville.Sequential Analysis: Hypothesis Testing and Changepoint Detection. Chapman & Hall/CRC (2014)
2014
-
[33]
M. M. Kipnis, R. M. Nigmatullin. Stability of the trinomial linear difference equations with two delays.Autom. Remote Control65(11):1710–1723 (2004)
2004
-
[34]
S. A. Kuruklis. The asymptotic stability of xn+1 −ax n + bxn−k = 0.J. Math. Anal. Appl.188 (1994) 719–731
1994
-
[35]
I. Itkin. Delayed repression and emergent instability in adaptive multi-agent systems. arXiv:2605.30392 (2026)
Pith/arXiv arXiv 2026
-
[36]
I. Itkin. Quickest detection of hallucination onset: delay bounds and learned CUSUM statistics. arXiv:2606.12476 (2026)
Pith/arXiv arXiv 2026
-
[37]
A. Clark, B. Alomair, L. Bushnell, R. Poovendran. Minimizing convergence error in multi-agent systems via leader selection: a supermodular optimization approach.IEEE Trans. Autom. Control(2014). arXiv:1306.4949
Pith/arXiv arXiv 2014
- [38]
-
[39]
A. Pokharel, R. Dantu. Hidden anchors in multi-agent LLM deliberation. arXiv:2606.19494 (2026)
Pith/arXiv arXiv 2026
-
[40]
A. Liu, J. Meng. Self-correction as feedback control: error dynamics, stability thresholds, and prompt interventions in LLMs. arXiv:2604.22273 (2026)
Pith/arXiv arXiv 2026
-
[41]
T. Xu et al. Unveiling the entropy dynamics of chain-of-thought reasoning. ICML 2026. arXiv:2606.02020
Pith/arXiv arXiv 2026
-
[42]
A. Jain, V. Krishnamurthy. Interacting large language model agents: interpretable models and social learning. arXiv:2411.01271 (2024)
arXiv 2024
-
[43]
Y. Ro, H. Qiu, ´I. Goiri et al. Sherlock: reliable and efficient agentic workflow execution. arXiv:2511.00330 (2025)
arXiv 2025
-
[44]
Clark, B
A. Clark, B. Alomair, L. Bushnell, R. Poovendran.Submodularity in Dynamics and Control of Networked Systems. Springer (2016)
2016
-
[45]
Pirani, S
M. Pirani, S. Sundaram. On the smallest eigenvalue of grounded Laplacian matrices.IEEE Trans. Autom. Control61 (2016)
2016
-
[46]
M. Pirani, E. Moradi Shahrivar, B. Fidan, S. Sundaram. Robustness of leader-follower networked dynamical systems. arXiv:1604.08651 (2016)
Pith/arXiv arXiv 2016
-
[47]
G. L. Nemhauser, L. A. Wolsey, M. L. Fisher. An analysis of approximations for maximizing submodular set functions—I.Math. Program.14 (1978)
1978
-
[48]
J. Thorne, A. Vlachos, C. Christodoulopoulos, A. Mittal. FEVER: a large-scale dataset for fact extraction and verification. NAACL 2018. arXiv:1803.05355. 17
Pith/arXiv arXiv 2018
-
[49]
Lewis et al
P. Lewis et al. Retrieval-augmented generation for knowledge-intensive NLP tasks. NeurIPS
-
[50]
Olfati-Saber, R
R. Olfati-Saber, R. M. Murray. Consensus problems in networks of agents with switching topology and time-delays.IEEE Trans. Autom. Control49 (2004) 1520–1533
2004
-
[51]
X. F. Wang, G. Chen. Pinning control of scale-free dynamical networks.Physica A310 (2002) 521–531
2002
-
[52]
H. Chen, W. Ji, L. Xu, S. Zhao. Multi-agent consensus seeking via large language models. arXiv:2310.20151 (2023)
arXiv 2023
-
[53]
H. Zhang et al. Stop overvaluing multi-agent debate: we must rethink evaluation and embrace model heterogeneity. arXiv:2502.08788 (2025). Appendix A Proof of Proposition 2 (oscillatory boundary) Setλ=e iθ in the characteristic equation, ei(δ+1)θ −a e iδθ +β= 0. Separating imaginary and real parts gives the stability boundary in parametric form, a(θ) = sin...
arXiv 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.