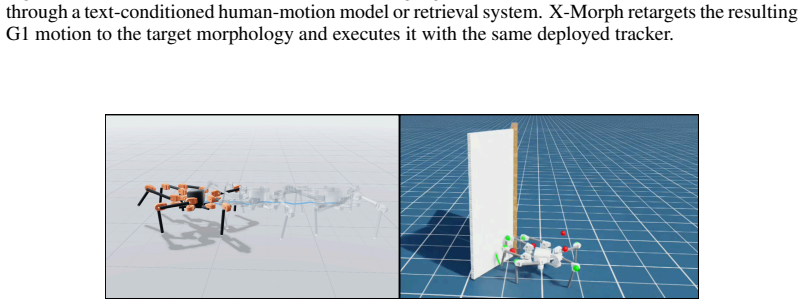
X-Morph: Human Motion Priors for Scalable Robot Learning Across Morphologies
Pith reviewed 2026-06-30 05:17 UTC · model grok-4.3
The pith
Human motion data can be retargeted to train deployable locomotion policies for quadrupeds, hexapods, and manipulator robots.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
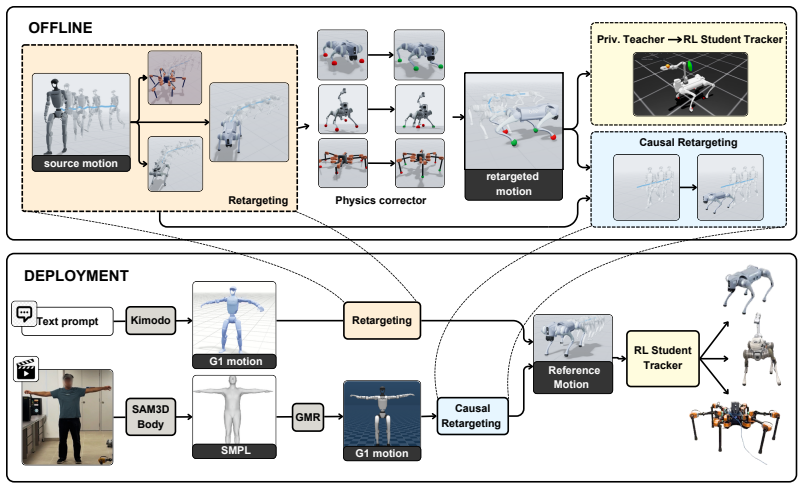
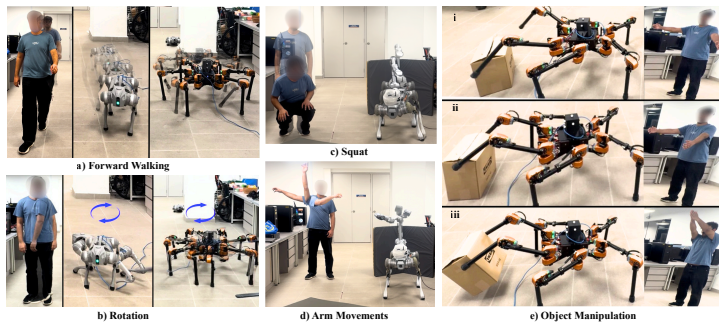
X-Morph converts human motions into kinematically plausible robot references through cross-morphology retargeting, tracks those references with a privileged reinforcement learning policy, and distills the result into a causal student policy; the resulting policies track diverse retargeted motions, generalize to unseen human motions, and support downstream applications including video-based teleoperation, behavior-prior control, and text-conditioned motion generation on quadruped, hexapod, and quadruped-manipulator platforms.
What carries the argument
Cross-morphology retargeting stage that produces kinematically plausible, intent-preserving robot motion references from human data for subsequent tracking by privileged RL.
If this is right
- Policies track diverse retargeted motions across three morphologically distinct platforms.
- Policies generalize to human motions not seen during training.
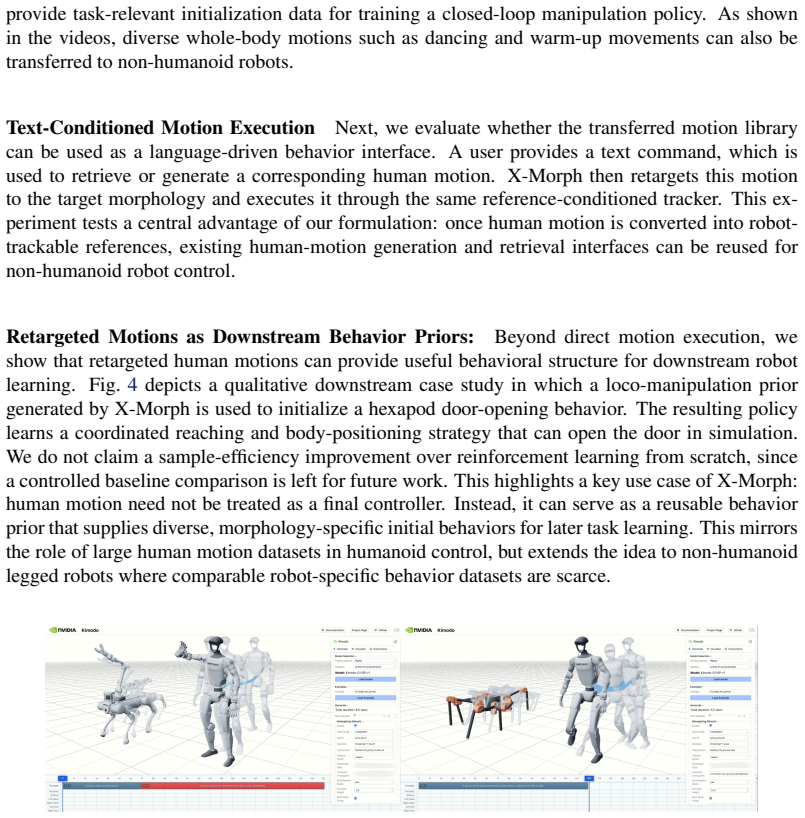
- The approach supports video-based teleoperation, behavior-prior control, and text-conditioned motion generation.
- Large-scale human motion data can serve as a substrate for reusable behavior priors on non-humanoid robots.
Where Pith is reading between the lines
- Shared human priors could reduce the cost of collecting robot-specific demonstration data for each new morphology.
- The retargeting-plus-distillation pattern might extend to wheeled or aerial platforms if suitable kinematic mappings are defined.
- Combining the distilled policies with sim-to-real transfer methods could accelerate physical robot deployment without additional motion capture.
Load-bearing premise
The retargeted motions remain kinematically and dynamically feasible for the target robot to track under its own physics.
What would settle it
Policies trained via the pipeline fail to track the retargeted references or show no advantage over direct robot-specific training when evaluated on held-out human motion sequences.
Figures
read the original abstract
Recent progress in humanoid behavior models has been driven in large part by abundant human motion data, but comparable motion data is scarce for non-humanoid legged robots such as quadrupeds, hexapods, and quadruped manipulators. A promising alternative is to repurpose human motion across embodiments; however, direct retargeting often produces motions that are visually plausible yet physically inconsistent or difficult to track under robot dynamics. We present X-Morph, a human-motion-to-robot-behavior pipeline that converts human motion into deployable locomotion and loco-manipulation policies for diverse non-humanoid legged morphologies. A cross-morphology retargeting stage converts human motions into kinematically plausible, intent-preserving robot references, which are then tracked by a privileged RL policy and distilled into a causal student policy. We evaluate X-Morph on three morphologically distinct platforms: a quadruped, a hexapod, and a quadruped equipped with a manipulator. The resulting policies track diverse retargeted motions, generalize to unseen human motions, and support downstream use cases including video-based teleoperation, behavior-prior control, and text-conditioned motion generation. These results suggest that large-scale human motion can serve as a substrate for learning broad, reusable behavior priors beyond humanoid robots. Project page: https://maker-rat.github.io/morph/
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents X-Morph, a pipeline that repurposes abundant human motion data for non-humanoid legged robots via a cross-morphology retargeting stage that produces kinematically plausible, intent-preserving robot references. These references are tracked by a privileged RL policy and distilled into a causal student policy. The method is evaluated on three platforms (quadruped, hexapod, quadruped-with-manipulator), with claims that the resulting policies track diverse retargeted motions, generalize to unseen human motions, and enable downstream tasks including video-based teleoperation, behavior-prior control, and text-conditioned motion generation.
Significance. If the core pipeline is validated with quantitative evidence of dynamic feasibility and generalization, the work would be significant for enabling scalable behavior learning across morphologies where robot-specific motion data is scarce. The explicit evaluation across three distinct platforms and the demonstration of multiple downstream use cases provide concrete evidence of breadth that strengthens the contribution relative to single-morphology retargeting approaches.
major comments (1)
- [Abstract] Abstract (and pipeline description): The central claim that retargeted references are tracked by the privileged RL policy and yield generalizable student policies rests on the assumption that the cross-morphology retargeting stage produces dynamically feasible trajectories. Kinematic plausibility and intent preservation do not imply satisfaction of the target robot's equations of motion, friction cones, or torque limits; no explicit feasibility check, failure-mode analysis, or fraction of invalid references is reported.
Simulated Author's Rebuttal
We thank the referee for this constructive comment on dynamic feasibility. We address it directly below.
read point-by-point responses
-
Referee: [Abstract] Abstract (and pipeline description): The central claim that retargeted references are tracked by the privileged RL policy and yield generalizable student policies rests on the assumption that the cross-morphology retargeting stage produces dynamically feasible trajectories. Kinematic plausibility and intent preservation do not imply satisfaction of the target robot's equations of motion, friction cones, or torque limits; no explicit feasibility check, failure-mode analysis, or fraction of invalid references is reported.
Authors: We agree that kinematic plausibility does not guarantee dynamic feasibility under the robot's equations of motion, friction cones, or torque limits. In our pipeline the privileged RL policy is trained to track the retargeted references using the full robot dynamics (including contact forces and actuator limits), and successful low-error tracking on the training set provides implicit evidence that the references are feasible for the motions retained. However, we did not report an explicit success rate (fraction of retargeted references trackable within a defined error threshold) or a failure-mode analysis of the retargeting stage. We will add this quantitative analysis and any failure examples to the revised manuscript. revision: yes
Circularity Check
No significant circularity; standard retarget-RL-distill pipeline with independent empirical claims.
full rationale
The described pipeline converts human motion via cross-morphology retargeting into references that are then tracked by a privileged RL policy and distilled to a student policy. No equations, fitted parameters, or central claims reduce by construction to inputs defined within the paper or via load-bearing self-citations. The abstract and provided text present the method as a sequence of distinct stages whose success is evaluated empirically on multiple platforms, without renaming known results or smuggling ansatzes through prior author work. This is the common case of a self-contained engineering pipeline.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
X. B. Peng, P. Abbeel, S. Levine, and M. van de Panne. Deepmimic: example-guided deep reinforcement learning of physics-based character skills.ACM Transactions on Graphics, 37 (4):1–14, 2018. ISSN 1557-7368. doi:10.1145/3197517.3201311. URLhttp://dx.doi. org/10.1145/3197517.3201311
-
[2]
BeyondMimic: From Motion Tracking to Versatile Humanoid Control via Guided Diffusion
K. Sreenath, C. K. Liu, T. E. Truong, Q. Liao, X. Huang, and G. Tevet. Beyondmimic: From motion tracking to versatile humanoid control via guided diffusion, 2025. URLhttps:// arxiv.org/abs/2508.08241
work page internal anchor Pith review Pith/arXiv arXiv 2025
- [3]
-
[4]
Z. Luo, Y . Yuan, T. Wang, C. Li, F. Casta˜neda, S. Chen, Z.-A. Cao, J. Li, D. Minor, Q. Ben, J. Park, D. Sami, Z. Wang, X. Da, R. Ding, C. Hogg, L. Song, E. Lim, E. Jeong, T. He, H. Xue, W. Xiao, S. Yuen, J. Kautz, Y . Chang, U. Iqbal, L. J. Fan, and Y . Zhu. Sonic: Supersizing motion tracking for natural humanoid whole-body control, 2026. URLhttps://arx...
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[5]
B.; Jiang, Y.; Wang, T.; Iqbal, U.; Minor, D.; de Ruyter, M.; et al
D. Rempe, M. Petrovich, Y . Yuan, H. Zhang, X. B. Peng, Y . Jiang, T. Wang, U. Iqbal, D. Minor, M. de Ruyter, J. Li, C. Tessler, E. Lim, E. Jeong, S. Wu, E. Hassani, M. Huang, J.-B. Yu, C. Chung, L. Song, O. Dionne, J. Kautz, S. Yuen, and S. Fidler. Kimodo: Scaling controllable human motion generation, 2026. URLhttps://arxiv.org/abs/2603.15546
-
[6]
T. Li, H. Jung, M. Gombolay, Y . Cho, and S. Ha. Crossloco: Human motion driven control of legged robots via guided unsupervised reinforcement learning. InInternational Conference on Learning Representations, volume 2024, pages 46892–46905, 2024
2024
- [7]
- [8]
- [9]
-
[10]
X. B. Peng, Z. Ma, P. Abbeel, S. Levine, and A. Kanazawa. Amp.ACM Transactions on Graphics (TOG), 40:1 – 20, 2021. URLhttps://api.semanticscholar.org/CorpusID: 233033739
2021
-
[11]
X. B. Peng, Y . Guo, L. Halper, S. Levine, and S. Fidler. Ase: Large-scale reusable adversarial skill embeddings for physically simulated characters.ACM Transactions On Graphics (TOG), 41(4):1–17, 2022
2022
-
[12]
Z. Luo, J. Cao, J. Merel, A. Winkler, J. Huang, K. Kitani, and W. Xu. Universal humanoid motion representations for physics-based control. InInternational Conference on Learning Representations, volume 2024, pages 56766–56782, 2024
2024
-
[13]
Z. Luo, J. Cao, K. Kitani, W. Xu, et al. Perpetual humanoid control for real-time simulated avatars. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 10895–10904, 2023
2023
- [14]
-
[15]
Y . Mu, Z. Zhang, Y . Shi, M. Matsumoto, K. Imamura, G. Tevet, C. Guo, M. Taylor, C. Shu, P. Xi, et al. Smp: Reusable score-matching motion priors for physics-based character control. arXiv preprint arXiv:2512.03028, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
- [16]
-
[17]
Aberman, P
K. Aberman, P. Li, D. Lischinski, O. Sorkine-Hornung, D. Cohen-Or, and B. Chen. Skeleton- aware networks for deep motion retargeting.ACM Transactions on Graphics, 39(4), Aug
-
[18]
ISSN 1557-7368. doi:10.1145/3386569.3392462. URLhttp://dx.doi.org/10. 1145/3386569.3392462
-
[19]
Q. Zhao, P. Li, W. Yifan, O. Sorkine-Hornung, and G. Wetzstein. Pose-to-motion: Cross- domain motion retargeting with pose prior, 2023. URLhttps://arxiv.org/abs/2310. 20249
2023
-
[20]
L.-H. Chen, Y . Zhang, Z. Yin, Z. Dou, X. Chen, J. Wang, T. Komura, and L. Zhang. Mo- tion2motion: Cross-topology motion transfer with sparse correspondence. InProceedings of the SIGGRAPH Asia 2025 Conference Papers, pages 1–11, 2025
2025
- [21]
-
[22]
L. Hu, Z. Zhang, C. Zhong, B. Jiang, and S. Xia. Pose-aware attention network for flexible motion retargeting by body part.IEEE Transactions on Visualization and Computer Graphics, 30(8):4792–4808, Aug. 2024. ISSN 2160-9306. doi:10.1109/tvcg.2023.3277918. URLhttp: //dx.doi.org/10.1109/TVCG.2023.3277918
-
[23]
S. Kim, M. Sorokin, J. Lee, and S. Ha. Humanconquad: human motion control of quadrupedal robots using deep reinforcement learning. InSIGGRAPH Asia 2022 Emerging Technologies, pages 1–2. 2022
2022
-
[24]
T. Li, J. Won, A. Clegg, J. Kim, A. Rai, and S. Ha. Ace: Adversarial correspondence em- bedding for cross morphology motion retargeting from human to nonhuman characters. In SIGGRAPH Asia 2023 Conference Papers, pages 1–11, 2023
2023
-
[25]
T. Yoon, D. Kang, S. Kim, J. Cheng, M. Ahn, S. Coros, and S. Choi. Spatio-temporal motion retargeting for quadruped robots.IEEE Transactions on Robotics, 2025
2025
- [26]
- [27]
-
[28]
Mahmood, N
N. Mahmood, N. Ghorbani, N. F. Troje, G. Pons-Moll, and M. J. Black. AMASS: Archive of motion capture as surface shapes. InInternational Conference on Computer Vision, pages 5442–5451, Oct. 2019
2019
-
[29]
F. G. Harvey, M. Yurick, D. Nowrouzezahrai, and C. Pal. Robust motion in-betweening.ACM Transactions on Graphics (Proceedings of ACM SIGGRAPH), 39(4), 2020
2020
-
[30]
S. Sood, L. Nakhwa, S. Ge, Y . Cao, J. Cheng, F. Zargarbashi, T. Yoon, S. Choi, S. Coros, and G. Sartoretti. Apex: Action priors enable efficient exploration for robust motion tracking on legged robots, 2025. URLhttps://arxiv.org/abs/2505.10022
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[31]
M. Loper, N. Mahmood, J. Romero, G. Pons-Moll, and M. J. Black. Smpl: a skinned multi- person linear model.ACM Trans. Graph., 34(6), Nov. 2015. ISSN 0730-0301. doi:10.1145/ 2816795.2818013. URLhttps://doi.org/10.1145/2816795.2818013. 11
-
[32]
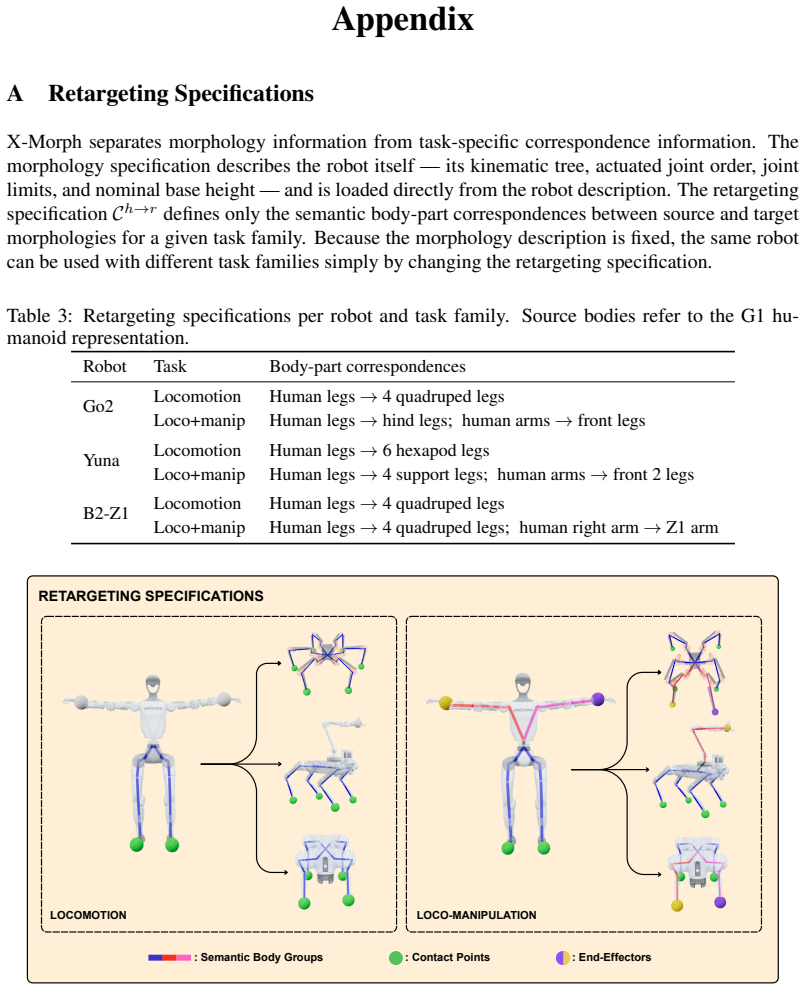
S. Sood, G. Sun, P. Li, and G. Sartoretti. Decap : Decaying action priors for accelerated imitation learning of torque-based legged locomotion policies. In2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 2809–2815, 2024. doi:10.1109/ IROS58592.2024.10802000. 12 Appendix A Retargeting Specifications X-Morph separates m...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.