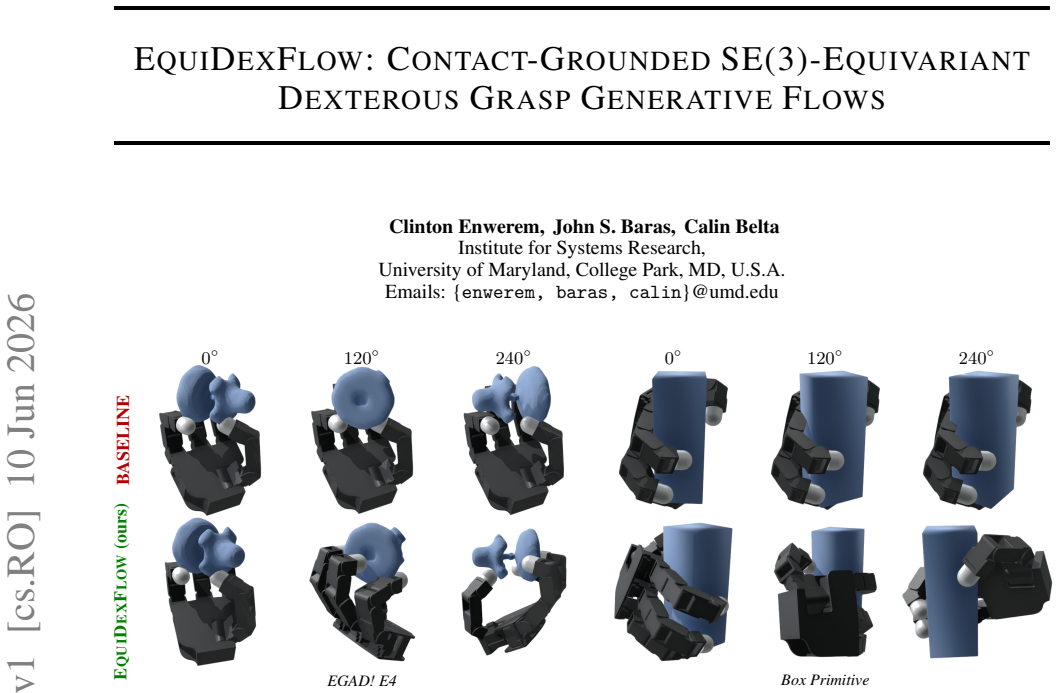
EquiDexFlow: Contact-Grounded SE(3)-Equivariant Dexterous Grasp Generative Flows
Pith reviewed 2026-06-27 09:18 UTC · model grok-4.3
The pith
EquiDexFlow generates dexterous grasps that satisfy surface contact and Coulomb friction by architectural projection rather than post-verification.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
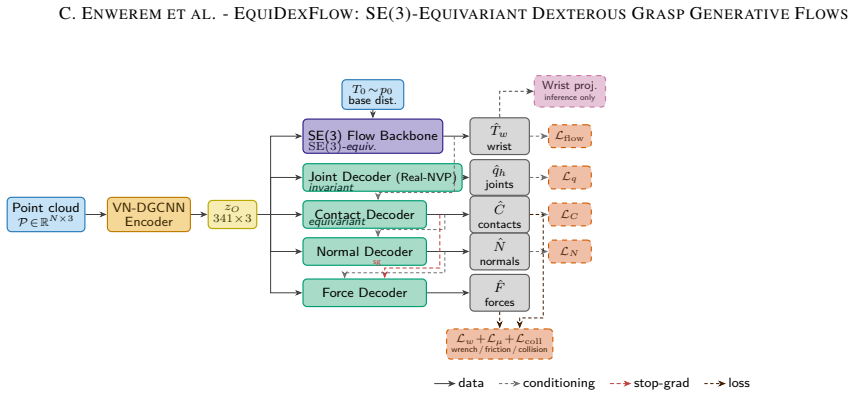
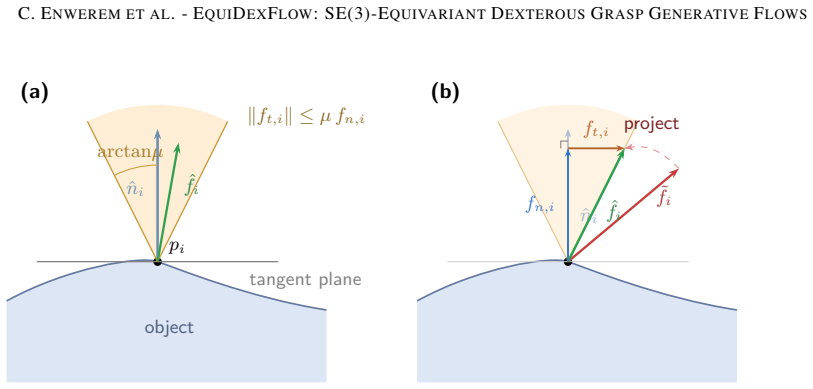
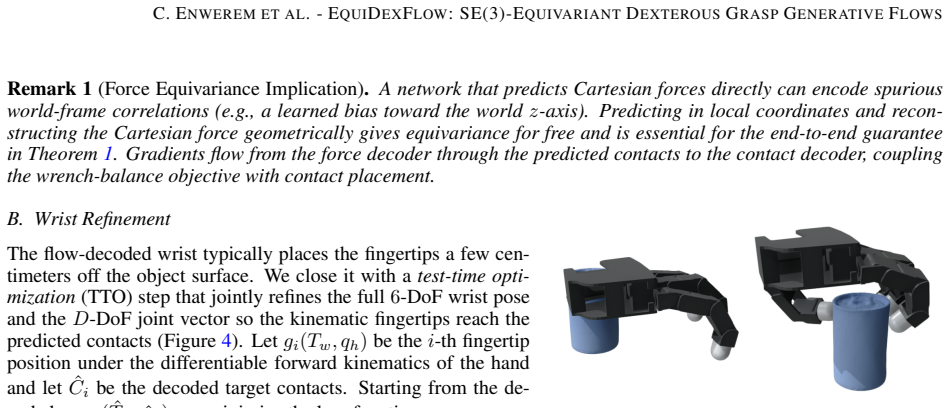
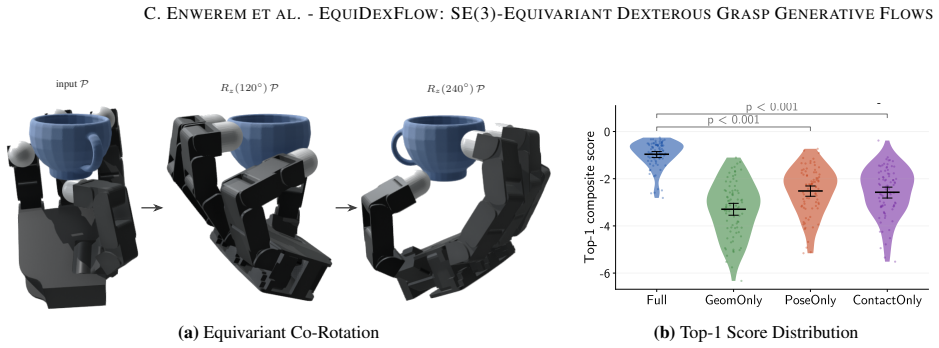
EquiDexFlow is an SE(3)-equivariant flow-matching model that jointly predicts wrist pose, joint angles, fingertip contacts, surface normals and contact forces from an object point cloud for the Allegro Hand; built-in projections place contacts on the surface and forces inside the Coulomb cone so that placement and friction compliance are satisfied without loss penalties, yielding zero friction violations, the best composite score and the lowest wrench residual on the training distribution while preserving exact equivariance.
What carries the argument
SE(3)-equivariant flow-matching network whose layers project contacts onto the object surface and forces into the Coulomb friction cone by construction.
If this is right
- The generated grasps exhibit zero friction violations and the lowest wrench residual among ablation variants.
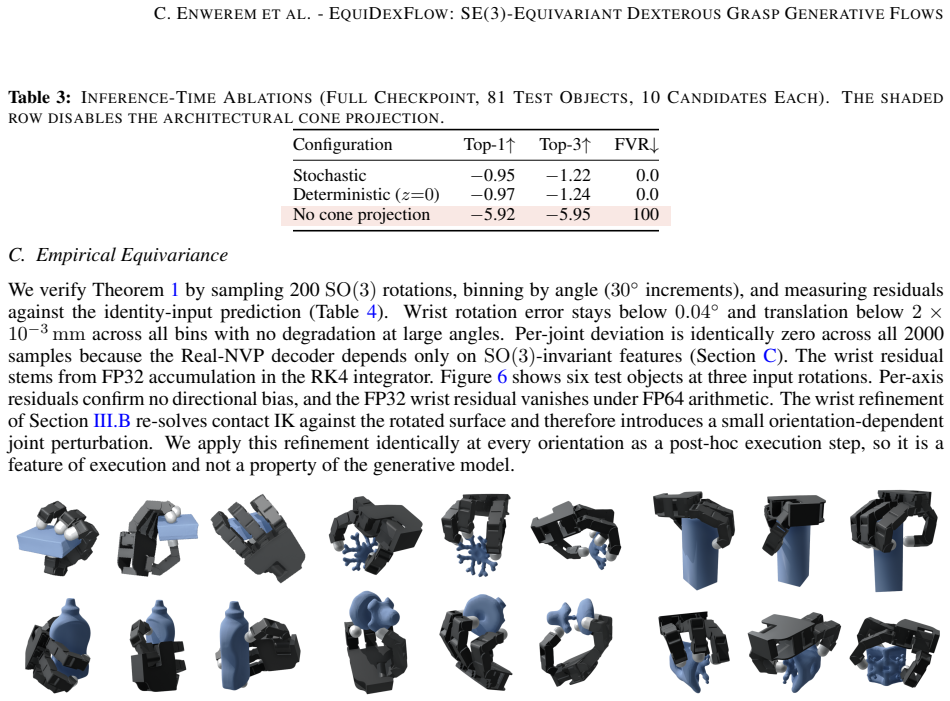
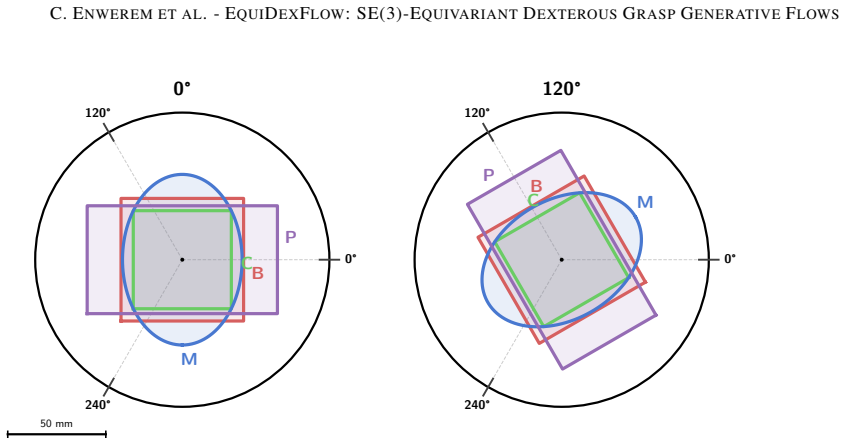
- End-to-end SE(3) equivariance holds with wrist residuals below 0.04 degrees and exactly zero joint deviation under 200 rotations.
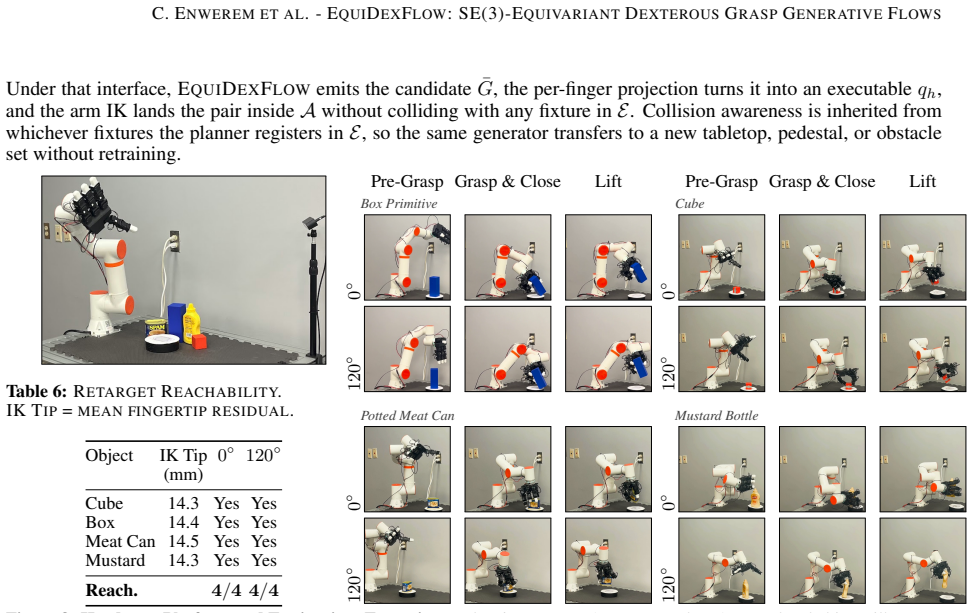
- Retargeted contacts to the LEAP Hand keep every joint at least 5 percent inside its actuator limits while preserving wrench balance.
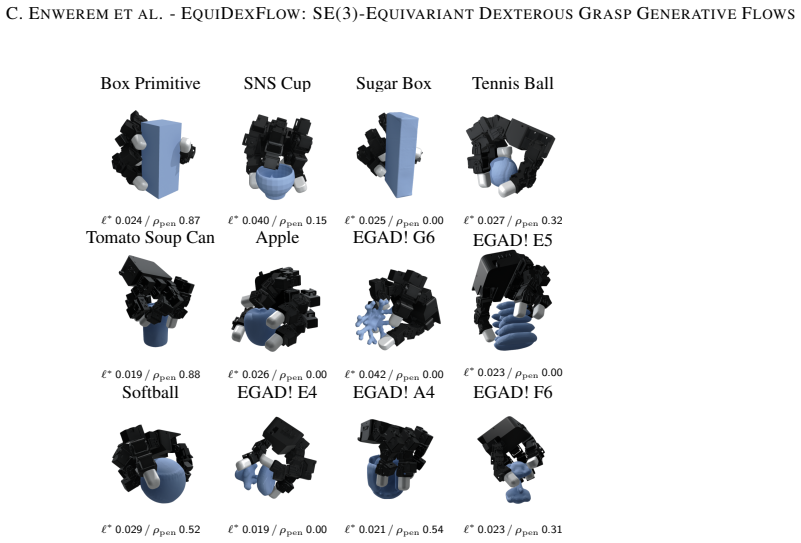
- Open-loop physical pick-and-hold succeeds on every test object, including asymmetric objects at both canonical and 120-degree rotated poses.
Where Pith is reading between the lines
- The built-in projections may allow grasp models to be trained with fewer explicit stability penalties than current practice.
- Exact equivariance could reduce the number of object orientations needed during data collection.
- The same projection mechanism might extend to other constraint types such as collision avoidance or joint limits.
Load-bearing premise
The 8100 force-closure grasps across 81 objects plus the architectural projections are enough to produce stable grasps on unseen objects and under real dynamics without further verification.
What would settle it
A set of grasps generated for objects outside the 81 training objects that produce measurable friction violations or drop during physical pick-and-hold execution would falsify the claim.
Figures

read the original abstract
Most learned dexterous grasp generators relegate contact forces to a downstream verification step, so a kinematically-plausible pose can still violate the conditions for a stable physical grasp. We address this with EquiDexFlow, an SE(3)-equivariant flow-matching model that jointly predicts wrist pose, joint angles, fingertip contacts, surface normals, and contact forces from an object point cloud. Our architecture projects contacts onto the object surface and forces into the Coulomb friction cone by construction, so placement and friction compliance hold without loss penalties. We prove end-to-end SE(3) equivariance and verify it empirically over 200 rotations, with wrist residuals below $0.04^\circ$ and exactly zero joint deviation. Trained on 8,100 force-closure grasps across 81 objects for the 16-DoF Allegro Hand, our model achieves zero friction violations, the best composite score, and the lowest wrench residual among all ablation variants. We retarget decoded fingertip contacts to a 16-DoF LEAP Hand via per-finger inverse kinematics, and our hardware-feasible refinement places every joint at least 5% inside its actuator envelope while preserving wrench balance. On the physical robot, retargeted EquiDexFlow-decoded grasps complete open-loop pick-and-hold trials on all six test objects, with every asymmetric object succeeding at both the canonical pose and a $120^\circ$ co-rotation. Videos, code, and checkpoints are available at https://equidexflow.github.io.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents EquiDexFlow, an SE(3)-equivariant flow-matching model for dexterous grasp generation. It jointly predicts wrist pose, joint angles, fingertip contacts, surface normals, and contact forces from an object point cloud for the 16-DoF Allegro Hand. The architecture incorporates projections to enforce contact placement on the object surface and forces within the Coulomb friction cone by construction. The paper provides a proof of end-to-end SE(3) equivariance, empirically verifies it over 200 rotations, and reports zero friction violations, superior composite scores, and successful open-loop physical robot trials on six test objects, including rotated asymmetric objects, after retargeting to the LEAP Hand.
Significance. If the central claims hold, this work offers a significant contribution to the field of robotic grasping by integrating physical constraints directly into the generative process through architectural design rather than loss penalties. The proven and verified equivariance, combined with hardware validation, suggests improved generalization and reliability for dexterous manipulation tasks. The release of code, checkpoints, and videos enhances the potential impact and reproducibility.
minor comments (2)
- [Abstract] Abstract: the composite score referenced as 'best' is not defined in the abstract; a brief parenthetical or reference to the relevant table/equation would improve clarity for readers.
- The source and curation criteria for the 8,100 force-closure grasps (e.g., whether from a public dataset and any exclusion rules) should be stated explicitly in the methods section to support the generalization claims.
Simulated Author's Rebuttal
We thank the referee for their positive evaluation of EquiDexFlow, the verification of our central claims on equivariance and constraint enforcement, and the recommendation for minor revision. No major comments were raised in the report.
Circularity Check
No significant circularity
full rationale
The paper's central claims rest on an architectural design that projects contacts and forces by construction (enforcing surface placement and Coulomb-cone compliance without loss terms), a mathematical proof of end-to-end SE(3) equivariance, and empirical verification on an external dataset of 8,100 force-closure grasps plus physical robot trials. None of these steps reduce the reported metrics (zero friction violations, lowest wrench residual) to quantities defined by fitted parameters from the same data or to self-citations whose content is unverified. The training data and hardware evaluation provide independent grounding, and the equivariance proof is presented as a self-contained derivation rather than an imported uniqueness result. No self-definitional, fitted-input, or ansatz-smuggling patterns appear in the derivation chain.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
EGAD! An Evolved Grasping Analysis Dataset for Diversity and Reproducibility in Robotic Manipulation.IEEE Robotics and Automation Letters, 5(3):4368–4375, 2020
Douglas Morrison, Peter Corke, and Jurgen Leitner. EGAD! An Evolved Grasping Analysis Dataset for Diversity and Reproducibility in Robotic Manipulation.IEEE Robotics and Automation Letters, 5(3):4368–4375, 2020
2020
-
[2]
Byeongdo Lim, Jongmin Kim, Jihwan Kim, Yonghyeon Lee, and Frank C. Park. EquiGraspFlow: SE(3)- Equivariant 6-DoF Grasp Pose Generative Flows. InProceedings of The 8th Conference on Robot Learning, volume 270 ofProceedings of Machine Learning Research, pages 5067–5086, 2025. 12 C. ENWEREM ET AL. - EQUIDEXFLOW: SE(3)-EQUIVARIANTDEXTEROUSGRASPGENERATIVEFLOWS
2025
-
[3]
Congyue Deng, Or Litany, Yueqi Duan, Adrien Poulenard, Andrea Tagliasacchi, and Leonidas J. Guibas. Vector Neurons: A General Framework for SO(3)-Equivariant Networks. InProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), pages 12200–12209, 2021
2021
-
[4]
Lipman, R
Y . Lipman, R. T. Chen, H. Ben-Hamu, M. Nickel, and M. Le. Flow Matching for Generative Modeling. InThe Eleventh International Conference on Learning Representations, 2023
2023
-
[5]
Munthe-Kaas
H. Munthe-Kaas. Runge-Kutta Methods on Lie Groups.BIT Numerical Mathematics, 38:92–111, 1998
1998
-
[6]
Y . Song, J. Sohl-Dickstein, D. P. Kingma, A. Kumar, S. Ermon, and B. Poole. Score-Based Generative Modeling through Stochastic Differential Equations. InThe Ninth International Conference on Learning Representations, 2021
2021
-
[7]
Li, Preston Culbertson, Joel W
Albert H. Li, Preston Culbertson, Joel W. Burdick, and Aaron D. Ames. FRoGGeR: Fast Robust Grasp Gen- eration via the Min-Weight Metric. InIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
2023
-
[8]
Tengyu Liu, Zeyu Liu, Ziyuan Jiao, Yixin Zhu, and Song-Chun Zhu. Synthesizing Diverse and Physically Stable Grasps With Arbitrary Hand Structures Using Differentiable Force Closure Estimator.IEEE Robotics and Automation Letters, 7(1):470–477, 2022
2022
-
[9]
DexGraspNet: A Large-Scale Robotic Dexterous Grasp Dataset for General Objects Based on Simulation
Ruicheng Wang, Jialiang Zhang, Jiayi Chen, Yinzhen Xu, Puhao Li, Tengyu Liu, and He Wang. DexGraspNet: A Large-Scale Robotic Dexterous Grasp Dataset for General Objects Based on Simulation. InProceedings of the IEEE International Conference on Robotics and Automation, pages 11359–11366, 2023
2023
-
[10]
DexGraspNet 2.0: Learning Generative Dexterous Grasping in Large-Scale Synthetic Cluttered Scenes
Jialiang Zhang, Haoran Liu, Danshi Li, Xinqiang Yu, Haoran Geng, Yufei Ding, Jiayi Chen, and He Wang. DexGraspNet 2.0: Learning Generative Dexterous Grasping in Large-Scale Synthetic Cluttered Scenes. InPro- ceedings of The 8th Conference on Robot Learning, volume 270 ofProceedings of Machine Learning Research, pages 5106–5133, 2025
2025
-
[11]
GenDexGrasp: Generalizable Dexterous Grasping
Puhao Li, Tengyu Liu, Yuyang Li, Yiran Geng, Yixin Zhu, Yaodong Yang, and Siyuan Huang. GenDexGrasp: Generalizable Dexterous Grasping. In2023 IEEE International Conference on Robotics and Automation (ICRA), pages 8068–8074, 2023
2023
-
[12]
GrainGrasp: Dexterous Grasp Generation with Fine-Grained Contact Guidance
Fuqiang Zhao, Dzmitry Tsetserukou, and Qian Liu. GrainGrasp: Dexterous Grasp Generation with Fine-Grained Contact Guidance. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 6470– 6476, 2024
2024
-
[13]
Mousavian, C
A. Mousavian, C. Eppner, and D. Fox. 6-DoF GraspNet: Variational Grasp Generation for Object Manipulation. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 2901–2910, 2019
2019
-
[14]
Urain, N
J. Urain, N. Funk, J. Peters, and G. Chalvatzaki. SE(3)-DiffusionFields: Learning Smooth Cost Functions for Joint Grasp and Motion Optimization through Diffusion. In2023 IEEE International Conference on Robotics and Automation (ICRA), pages 5923–5930, 2023
2023
-
[15]
Z. Weng, H. Lu, J. Lundell, and D. Kragic. CapGrasp: AnR 3×SO(2)-Equivariant Continuous Approach- Constrained Generative Grasp Sampler.IEEE Robotics and Automation Letters, 2024
2024
-
[16]
DexDiffuser: Generating Dexterous Grasps With Diffusion Models.IEEE Robotics and Automation Letters, 9(12):11834–11840, 2024
Zehang Weng, Haofei Lu, Danica Kragic, and Jens Lundell. DexDiffuser: Generating Dexterous Grasps With Diffusion Models.IEEE Robotics and Automation Letters, 9(12):11834–11840, 2024
2024
-
[17]
FFHFlow: A Flow-based Variational Approach for Learning Diverse Dexterous Grasps with Shape-Aware Introspection.Transactions on Machine Learning Research, 2025
Qian Feng, Jianxiang Feng, Zhaopeng Chen, Rudolph Triebel, and Alois Knoll. FFHFlow: A Flow-based Variational Approach for Learning Diverse Dexterous Grasps with Shape-Aware Introspection.Transactions on Machine Learning Research, 2025
2025
-
[18]
UniDexGrasp: Universal Robotic Dexterous Grasp- ing via Learning Diverse Proposal Generation and Goal-Conditioned Policy
Yinzhen Xu, Weikang Wan, Jialiang Zhang, Haoran Liu, Zikang Shan, Hao Shen, Ruicheng Wang, Haoran Geng, Yijia Weng, Jiayi Chen, Tengyu Liu, Li Yi, and He Wang. UniDexGrasp: Universal Robotic Dexterous Grasp- ing via Learning Diverse Proposal Generation and Goal-Conditioned Policy. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Rec...
2023
-
[19]
X. Zhu, D. Wang, O. Biza, G. Su, R. Walters, and R. Platt. Sample Efficient Grasp Learning Using Equivariant Models. InRobotics: Science and Systems, 2022
2022
-
[20]
Huang, D
H. Huang, D. Wang, X. Zhu, R. Walters, and R. Platt. Edge Grasp Network: A Graph-Based SE(3)-Invariant Approach to Grasp Detection. In2023 IEEE International Conference on Robotics and Automation (ICRA), pages 3882–3888, 2023
2023
-
[21]
Köhler, L
J. Köhler, L. Klein, and F. Noé. Equivariant Flows: Exact Likelihood Generative Learning for Symmetric Densities. InInternational Conference on Machine Learning, pages 5361–5370. PMLR, 2020
2020
-
[22]
Katsman, A
I. Katsman, A. Lou, D. Lim, Q. Jiang, S. N. Lim, and C. M. De Sa. Equivariant Manifold Flows.Advances in Neural Information Processing Systems, 34:10600–10612, 2021. 13 C. ENWEREM ET AL. - EQUIDEXFLOW: SE(3)-EQUIVARIANTDEXTEROUSGRASPGENERATIVEFLOWS
2021
-
[23]
K. Chen, X. Chen, Z. Yu, M. Zhu, and H. Yang. EquiDiff: A Conditional Equivariant Diffusion Model for Trajectory Prediction. In2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC), pages 746–751, 2023
2023
-
[24]
Rozenberg and D
E. Rozenberg and D. Freedman. Semi-Equivariant Conditional Normalizing Flows, with Applications to Target- Aware Molecule Generation.Machine Learning: Science and Technology, 4(3):035037, 2023
2023
-
[25]
EFF-Grasp: Energy-Field Flow Matching for Physics-Aware Dexterous Grasp Generation, 2026
Yukun Zhao, Zichen Zhong, Yongshun Gong, Yilong Yin, and Haoliang Sun. EFF-Grasp: Energy-Field Flow Matching for Physics-Aware Dexterous Grasp Generation, 2026. Preprint, arXiv:2603.16151
-
[26]
Elizaveta Semenyakina, Ivan Snegirev, Mariya Lezina, Miguel Altamirano Cabrera, Safina Gulyamova, and Dzmitry Tsetserukou. GraspSense: Physically Grounded Grasp and Grip Planning for a Dexterous Robotic Hand via Language-Guided Perception and Force Maps, 2026. Preprint, arXiv:2604.05697
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[27]
Adversarial Game-Theoretic Algorithm for Dexterous Grasp Synthesis, 2025
Yu Chen, Botao He, Yuemin Mao, Arthur Jakobsson, Jeffrey Ke, Yiannis Aloimonos, Guanya Shi, Howie Choset, Jiayuan Mao, and Jeffrey Ichnowski. Adversarial Game-Theoretic Algorithm for Dexterous Grasp Synthesis, 2025
2025
-
[28]
Risk-Constrained Belief-Space Optimization for Safe Control under Latent Uncertainty
Clinton Enwerem, John S. Baras, and Calin Belta. Risk-Constrained Belief-Space Optimization for Safe Control under Latent Uncertainty, 2026. arXiv:2604.03868
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[29]
Clinton Enwerem, Shreya Kalyanaraman, John S. Baras, and Calin Belta. Variational Neural Parameterizations for Robust Dexterous Grasping under Multimodal Uncertainty, 2026. arXiv:2604.25897
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[30]
A micro Lie theory for state estimation in robotics,
Joan Solà, Jeremie Deray, and Dinesh Atchuthan. A Micro Lie Theory for State Estimation in Robotics, 2021. Preprint, arXiv:1812.01537
-
[31]
Murray, Zexiang Li, and S
Richard M. Murray, Zexiang Li, and S. Shankar Sastry.A Mathematical Introduction to Robotic Manipulation. CRC Press, 1st edition, 2017
2017
-
[32]
R. T. Q. Chen and Y . Lipman. Flow Matching on General Geometries. InThe Twelfth International Conference on Learning Representations, 2024
2024
-
[33]
R. T. Chen, Y . Rubanova, J. Bettencourt, and D. K. Duvenaud. Neural Ordinary Differential Equations.Advances in Neural Information Processing Systems, 31:6572–6583, 2018
2018
-
[34]
Mathieu and M
E. Mathieu and M. Nickel. Riemannian Continuous Normalizing Flows.Advances in Neural Information Pro- cessing Systems, 33:2503–2515, 2020
2020
-
[35]
Classifier-Free Diffusion Guidance
Jonathan Ho and Tim Salimans. Classifier-Free Diffusion Guidance, 2022. Preprint, arXiv:2207.12598
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[36]
Density Estimation Using Real NVP
Laurent Dinh, Jascha Sohl-Dickstein, and Samy Bengio. Density Estimation Using Real NVP. InInternational Conference on Learning Representations, 2017
2017
-
[37]
Drake: Model-Based Design and Verification for Robotics, 2019
Russ Tedrake and the Drake Development Team. Drake: Model-Based Design and Verification for Robotics, 2019
2019
-
[38]
Berk Calli, Aaron Walsman, Arjun Singh, Siddhartha Srinivasa, Pieter Abbeel, and Aaron M. Dollar. The YCB Object and Model Set: Towards Common Benchmarks for Manipulation Research. In2015 International Conference on Advanced Robotics (ICAR), pages 510–517, 2015
2015
-
[39]
D. P. Kingma and J. Ba. Adam: A Method for Stochastic Optimization. InThe Third International Conference on Learning Representations, 2015
2015
-
[40]
LEAP Hand: Low-Cost, Efficient, and Anthropomorphic Hand for Robot Learning
Kenneth Shaw, Ananye Agarwal, and Deepak Pathak. LEAP Hand: Low-Cost, Efficient, and Anthropomorphic Hand for Robot Learning. InRobotics: Science and Systems XIX, 2023
2023
-
[41]
Umit Rusen Aktas, Chao Zhao, Marek Kopicki, Ales Leonardis, and Jeremy L. Wyatt. Deep Dexterous Grasping of Novel Objects from a Single View, 2019
2019
-
[42]
GAGrasp: Geometric Algebra Diffusion for Dexterous Grasping
Tao Zhong and Christine Allen-Blanchette. GAGrasp: Geometric Algebra Diffusion for Dexterous Grasping. In IEEE International Conference on Robotics and Automation (ICRA), 2025. arXiv:2503.04123. 14 C. ENWEREM ET AL. - EQUIDEXFLOW: SE(3)-EQUIVARIANTDEXTEROUSGRASPGENERATIVEFLOWS APPENDIX A. ARCHITECTUREDETAILS The VN-MLP is parameterized by four VN-Linear-L...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.