Adaptive arrival cost update for improving Moving Horizon Estimation performance
Pith reviewed 2026-06-28 08:35 UTC · model grok-4.3
The pith
Adaptive updates to the arrival cost allow Moving Horizon Estimation to use shorter horizons while preserving stability and convergence of the estimates.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Exploiting adaptive estimation methods to update the parameters of the arrival cost produces a sufficiently accurate approximation that the size of the optimization problem can be significantly reduced while still guaranteeing stability and convergence of the estimates.
What carries the argument
Adaptive parameter update applied to the arrival cost term inside the finite-horizon optimization that defines Moving Horizon Estimation.
If this is right
- The length of the moving horizon can be reduced while the estimates remain stable and convergent.
- Past measurement information is incorporated more effectively into the current estimate.
- The method applies directly to constrained dynamical systems with bounds on states, noises, and parameters.
- Simulation studies confirm that the reduced-horizon formulation still converges.
Where Pith is reading between the lines
- The same adaptive arrival-cost idea could be tested on systems whose parameters drift over time.
- It may lower the computational load enough to enable real-time implementation on embedded hardware.
- The technique might be combined with other arrival-cost approximations such as those based on Kalman filtering.
Load-bearing premise
Adaptive estimation methods can be applied to update the parameters of the arrival cost in a way that produces a sufficiently accurate approximation without compromising the stability or convergence properties of the overall MHE scheme.
What would settle it
A numerical example in which the adaptive update is used, the horizon is shortened, and the resulting state estimates either diverge or violate the stability bound that the paper claims is preserved.
Figures
read the original abstract
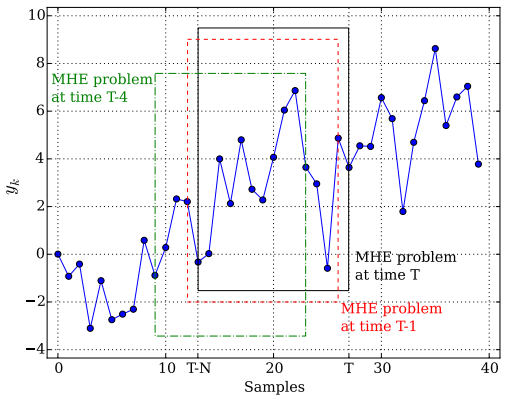
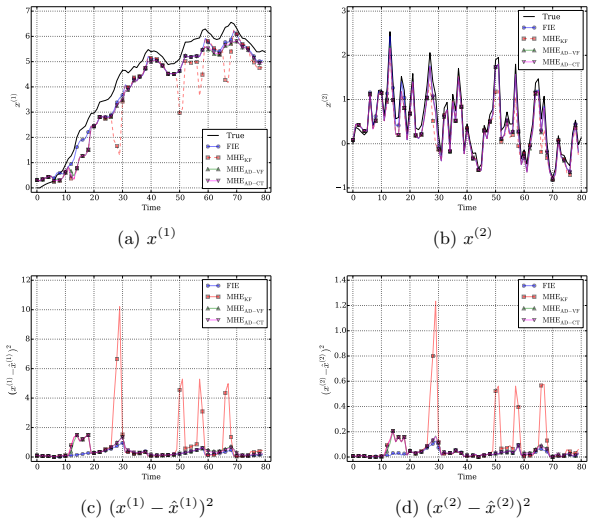
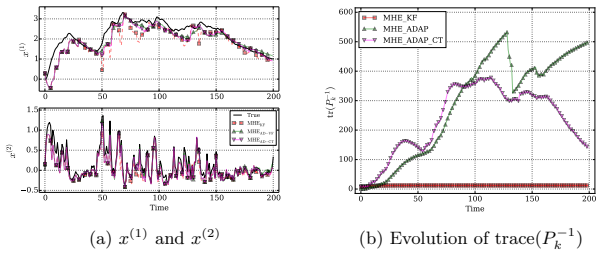
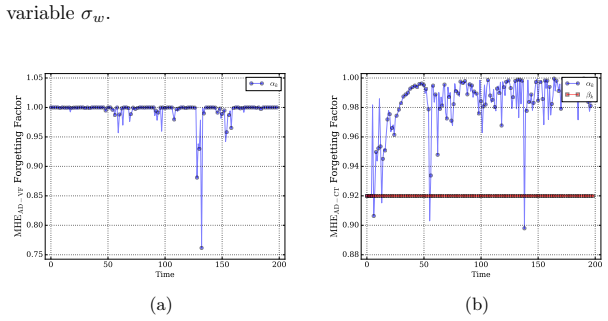
Moving horizon estimation is an efficient technique to estimate states and parameters of constrained dynamical systems. It relies on the solution of a finite horizon optimization problem to compute the estimates, providing a natural framework to handle bounds and constraints on estimates, noises and parameters. However, the approximation of the arrival cost and its updating mechanism are an active research topic. The arrival cost is very important because it provides a mean to incorporate information from previous measurements to the current estimates and it is difficult to estimate its true value. In this work, we exploit the features of adaptive estimation methods to update the parameters of the arrival cost. We show that, having a better approximation of the arrival cost, the size of the optimization problem can be significantly reduced guaranteeing the stability and convergence of the estimates. These properties are illustrated through simulation studies.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes using adaptive estimation methods to update parameters of the arrival cost in Moving Horizon Estimation (MHE) for constrained dynamical systems. The central claim is that an improved arrival-cost approximation permits a significant reduction in the size of the finite-horizon optimization problem while still guaranteeing stability and convergence of the state estimates; these properties are asserted to be illustrated via simulation studies.
Significance. If a theoretically justified adaptive arrival-cost update can be shown to preserve the stability margins that standard MHE theory obtains from a sufficiently long horizon or exact arrival cost, the work would offer a practical route to lower computational cost in real-time constrained estimation. The combination of adaptive estimation with MHE arrival-cost design is a plausible direction, but the current absence of any derivation or stability argument restricts the result to an empirical observation.
major comments (1)
- [Abstract] Abstract: the statement that the reduced-size problem 'guaranteeing the stability and convergence of the estimates' is not accompanied by any Lyapunov argument, invariant-set argument, or extension of existing MHE stability theorems. The text immediately qualifies that the properties 'are illustrated through simulation studies,' which does not establish the claimed guarantee and leaves the central contribution unsubstantiated.
Simulated Author's Rebuttal
We thank the referee for the careful reading and the identification of an important inconsistency between the abstract wording and the manuscript content. We agree that the claim of a guarantee requires revision.
read point-by-point responses
-
Referee: [Abstract] Abstract: the statement that the reduced-size problem 'guaranteeing the stability and convergence of the estimates' is not accompanied by any Lyapunov argument, invariant-set argument, or extension of existing MHE stability theorems. The text immediately qualifies that the properties 'are illustrated through simulation studies,' which does not establish the claimed guarantee and leaves the central contribution unsubstantiated.
Authors: We agree that the abstract overstates the result by using the word 'guaranteeing.' The manuscript develops an adaptive arrival-cost update and demonstrates, via simulation on constrained systems, that shorter horizons can be employed while retaining acceptable estimation performance. No Lyapunov or invariant-set analysis is provided. We will revise the abstract to state that the stability and convergence properties are illustrated through simulation studies, removing any implication of a theoretical guarantee. revision: yes
Circularity Check
No derivation chain present; stability claim supported only by simulation.
full rationale
The paper asserts that adaptive arrival-cost updates permit a significantly reduced optimization horizon while guaranteeing stability and convergence, but explicitly states these properties are illustrated through simulation studies rather than derived. No equations, theorems, or load-bearing steps are visible that could reduce a prediction to a fitted input or self-citation by construction. The absence of any mathematical derivation chain means there is nothing to inspect for the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Adaptive estimation methods can be exploited to update arrival-cost parameters while preserving MHE stability and convergence
Reference graph
Works this paper leans on
-
[1]
Andrew H Jazwinski.Stochastic Processes and Filtering Theory. Vol. 64. Academic Press, 1970
1970
-
[2]
CRC press, 2011
John L Crassidis and John L Junkins.Optimal estimation of dynamic systems. CRC press, 2011
2011
-
[3]
Critical evaluation of extended Kalman filtering and moving-horizon estimation
Eric L Haseltine and James B Rawlings. “Critical evaluation of extended Kalman filtering and moving-horizon estimation”. In:Industrial & engi- neering chemistry research44.8 (2005), pp. 2451–2460
2005
-
[4]
Kalman filtering with state constraints: a survey of linear and nonlinear algorithms
Dan Simon. “Kalman filtering with state constraints: a survey of linear and nonlinear algorithms”. In:Control Theory & Applications, IET4.8 (2010), pp. 1303–1318
2010
-
[5]
Kalman filtering with state equality con- straints
Dan Simon and Tien Li Chia. “Kalman filtering with state equality con- straints”. In:Aerospace and Electronic Systems, IEEE Transactions on 38.1 (2002), pp. 128–136
2002
-
[6]
Artech House, 2004
David Lee Hall and Sonya AH McMullen.Mathematical techniques in multisensor data fusion. Artech House, 2004
2004
-
[7]
Gain-constrained Kalman filtering for linear and nonlinear systems
Bruno Ot´ avio Soares Teixeira et al. “Gain-constrained Kalman filtering for linear and nonlinear systems”. In:Signal Processing, IEEE Transactions on56.9 (2008), pp. 4113–4123. 18
2008
-
[8]
Constrained Kalman filtering via den- sity function truncation for turbofan engine health estimation
Dan Simon and Donald L Simon. “Constrained Kalman filtering via den- sity function truncation for turbofan engine health estimation”. In:Inter- national Journal of Systems Science41.2 (2010), pp. 159–171
2010
-
[9]
State estimation for linear systems with state equality constraints
Sangho Ko and Robert R Bitmead. “State estimation for linear systems with state equality constraints”. In:Automatica43.8 (2007), pp. 1363– 1368
2007
-
[10]
Constrained lin- ear state estimation—a moving horizon approach
Christopher V Rao, James B Rawlings, and Jay H Lee. “Constrained lin- ear state estimation—a moving horizon approach”. In:Automatica37.10 (2001), pp. 1619–1628
2001
-
[11]
Computation of arrival cost for moving horizon estimation via unscented Kalman filtering
Cheryl C Qu and Juergen Hahn. “Computation of arrival cost for moving horizon estimation via unscented Kalman filtering”. In:Journal of Process Control19.2 (2009), pp. 358–363
2009
-
[12]
A real-time algorithm for moving horizon state and pa- rameter estimation
Peter K¨ uhl et al. “A real-time algorithm for moving horizon state and pa- rameter estimation”. In:Computers & chemical engineering35.1 (2011), pp. 71–83
2011
-
[13]
Moving horizon estimation for staged QP problems
Eric Chu et al. “Moving horizon estimation for staged QP problems”. In:Decision and Control (CDC), 2012 IEEE 51st Annual Conference on. IEEE. 2012, pp. 3177–3182
2012
-
[14]
Constrained process monitor- ing: Moving-horizon approach
Christopher V Rao and James B Rawlings. “Constrained process monitor- ing: Moving-horizon approach”. In:AIChE journal48.1 (2002), pp. 97– 109
2002
-
[15]
On the use of constraints in least squares estimation and control
Douglas G Robertson and Jay H Lee. “On the use of constraints in least squares estimation and control”. In:Automatica38.7 (2002), pp. 1113– 1123
2002
-
[16]
Multiple window moving horizon estimation
Ali A Al-Matouq and Tyrone L Vincent. “Multiple window moving horizon estimation”. In:Automatica53 (2015), pp. 264–274
2015
-
[17]
Nonlinear Bayesian state estimation: A review of recent developments
Sachin C Patwardhan et al. “Nonlinear Bayesian state estimation: A review of recent developments”. In:Control Engineering Practice20.10 (2012), pp. 933–953
2012
-
[18]
Receding horizon recursive state estimation
Kenneth R Muske, James B Rawlings, and Jay H Lee. “Receding horizon recursive state estimation”. In:American control conference. Vol. 30. 1993, pp. 900–904
1993
-
[19]
Efficient moving horizon es- timation and nonlinear model predictive control
Matthew J Tenny and James B Rawlings. “Efficient moving horizon es- timation and nonlinear model predictive control”. In:American Control Conference, 2002. Proceedings of the 2002. Vol. 6. IEEE. 2002, pp. 4475– 4480
2002
-
[20]
Ioan Dor´ e Landau et al.Adaptive control. Vol. 51. Springer Berlin, 1998
1998
-
[21]
Positive Definite Matrices
C. R. Johnson. “Positive Definite Matrices”. In:The American Mathe- matical Monthly77.3 (Mar. 1970), p. 259.issn: 00029890.doi:10.2307/ 2317709.url:http : / / www . jstor . org / stable / 2317709 ? origin = crossref. 19
1970
-
[22]
Moving horizon state estimation of discrete time systems
Peter Klaus Findeisen. “Moving horizon state estimation of discrete time systems”. MA thesis. University of Wisconsin, Madison, 1997
1997
-
[23]
Moving horizon strategies for the constrained mon- itoring and control of nonlinear discrete-time systems
Christopher V Rao. “Moving horizon strategies for the constrained mon- itoring and control of nonlinear discrete-time systems”. PhD thesis. Uni- versity of Wisconsin, Madison, 2000
2000
-
[24]
Implementation of self- tuning regulators with variable forgetting factors
TR Fortescue, LS Kershenbaum, and BE Ydstie. “Implementation of self- tuning regulators with variable forgetting factors”. In:Automatica17.6 (1981), pp. 831–835
1981
-
[25]
On self tuning regulators
Karl Johan ˚Astr¨ om and Bj¨ orn Wittenmark. “On self tuning regulators”. In:Automatica9.2 (1973), pp. 185–199
1973
-
[26]
Deterministic convergence of a self- tuning regulator with variable forgetting factor
A. Osorio Cordero and D.Q. Mayne. “Deterministic convergence of a self- tuning regulator with variable forgetting factor”. In:IEE Proceedings D Control Theory and Applications128.1 (1981), pp. 19–23.issn: 01437054. doi:10 . 1049 / ip - d . 1981 . 0004.url:http : / / digital - library . theiet.org/content/journals/10.1049/ip-d.1981.0004
-
[27]
Adaptation and tracking in sys- tem identification—A survey
Lennart Ljung and Svante Gunnarsson. “Adaptation and tracking in sys- tem identification—A survey”. In:Automatica26.1 (Jan. 1990), pp. 7– 21.issn: 00051098.doi:10.1016/0005-1098(90)90154-A.url:http: //linkinghub.elsevier.com/retrieve/pii/000510989090154A
-
[28]
Nonlinear moving horizon estimation for systems with bounded disturbances
Matthias A. Muller. “Nonlinear moving horizon estimation for systems with bounded disturbances”. In:2016 American Control Conference (ACC). IEEE, July 2016, pp. 883–888.isbn: 978-1-4673-8682-1.doi:10.1109/ ACC . 2016 . 7525026.url:http : / / ieeexplore . ieee . org / document / 7525026/
2016
-
[29]
Constrained state estimation for nonlinear discrete-time systems: Stability and moving horizon approximations
Christopher V Rao, James B Rawlings, and David Q Mayne. “Constrained state estimation for nonlinear discrete-time systems: Stability and moving horizon approximations”. In:Automatic Control, IEEE Transactions on 48.2 (2003), pp. 246–258
2003
-
[30]
org / rawlings-group/mpc-tools-casadi
Michael J Risbeck, Nishith R Patel, and James B Rawlings.Nonlinear Model Predictive Control Tools for Casadi.https : / / bitbucket . org / rawlings-group/mpc-tools-casadi. Accessed: 2016-10-10. 2015
2016
-
[31]
A General-Purpose Software Framework for Dynamic Optimization
Joel Andersson. “A General-Purpose Software Framework for Dynamic Optimization”. PhD thesis. Department of Electrical Engineering (ESAT/SCD) and Optimization in Engineering Center, Kasteelpark Arenberg 10, 3001- Heverlee, Belgium: Arenberg Doctoral School, KU Leuven, Oct. 2013. 20
2013
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.