Bridging Local Observation and Global Simulation in Closed-Loop Traffic Modeling
Pith reviewed 2026-07-01 05:06 UTC · model grok-4.3
The pith
A plug-in evaluator scores simulator actions under full scene context to reduce collisions by 31 percent without retraining.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
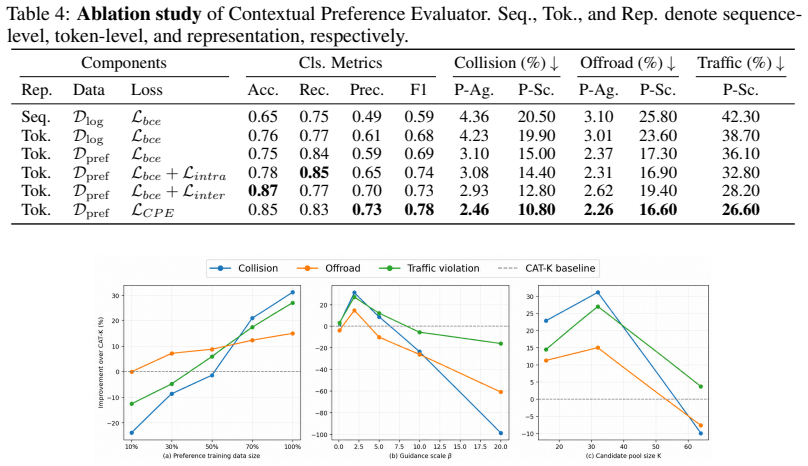
CRAFT treats the base simulator as a globally observable sandbox that produces self-supervised what-if rollouts from logged initial states; these rollouts expose context-induced failures that are then grounded with human-aligned driving priors and turned into preference supervision for a Contextual Preference Evaluator. The evaluator scores candidate actions under complete scene context and reweights autoregressive decoding at inference time, yielding a 31.2 percent reduction in collisions and a 33.2 percent reduction in traffic violations while leaving the original simulator weights unchanged.
What carries the argument
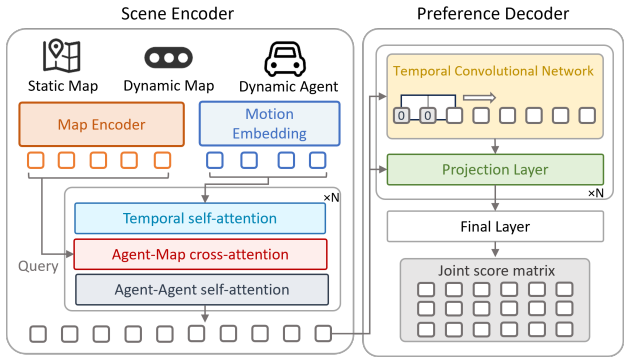
The Contextual Preference Evaluator, a plug-in module trained on preference pairs derived from self-supervised failure rollouts, that scores and reweights actions according to complete global scene context.
If this is right
- Existing autoregressive simulators can be deployed in fully observable environments with fewer unsafe behaviors.
- Alignment occurs at inference time, so no additional training of the base model is required.
- Preference supervision derived from internal rollouts substitutes for large-scale human labeling of global scenes.
- The same failure-discovery loop can be repeated on new initial states to adapt the evaluator without changing the simulator.
Where Pith is reading between the lines
- The method could be tested on other autoregressive sequence models that face partial-observation training versus full-observation deployment mismatches.
- If the evaluator generalizes across different base simulators, it would reduce the need to collect globally observable training data for each new model.
- One could measure whether the preference pairs also improve long-horizon stability metrics that the paper does not report.
Load-bearing premise
Self-supervised what-if rollouts from logged initial states will reliably expose the precise context-induced failures that human-aligned priors can convert into effective preference supervision.
What would settle it
Run the base simulator and the CRAFT-augmented version on the same closed-loop test set; if the collision and violation rates show no statistically significant drop or an increase, the alignment mechanism has not mitigated the mismatch.
Figures
read the original abstract
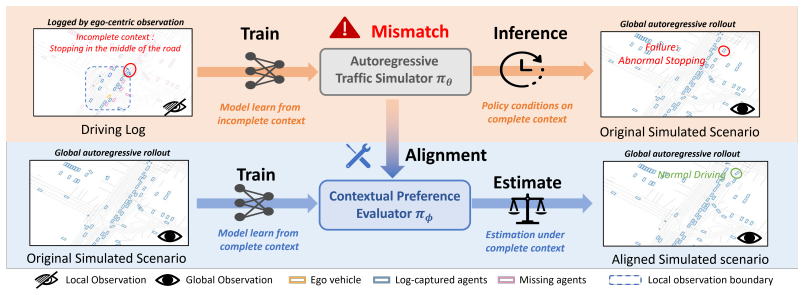
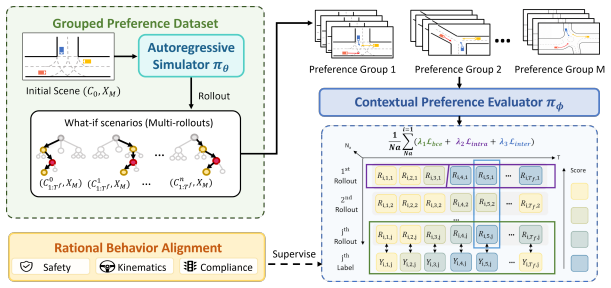
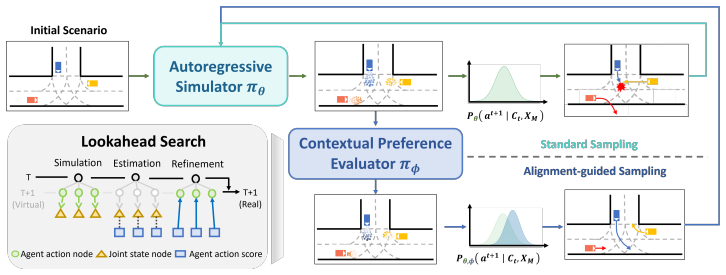
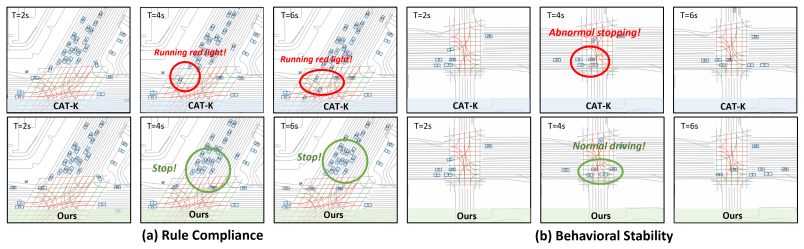
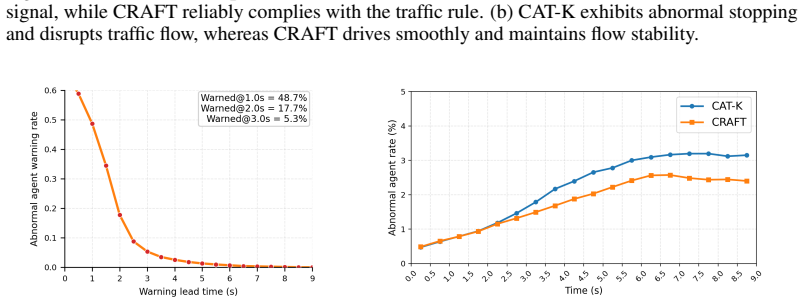
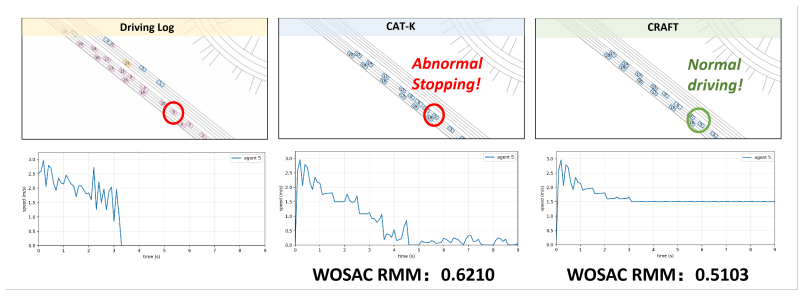
A local-to-global context mismatch arises when autoregressive traffic simulators trained on ego-centric driving logs are deployed in globally observable closed-loop environments. In such logs, the ego vehicle has rich local observations, while surrounding agents are only partially observed due to perception limits and occlusions. As a result, simulators may learn incomplete context--action mappings that remain hidden in log-based training but emerge during closed-loop rollouts, leading to unrealistic behaviors such as abnormal stops, unsafe interactions, and rule violations. We propose CRAFT, a Contextual pReference Alignment Framework for Traffic Simulation, to mitigate this mismatch via self-supervised failure discovery and preference-guided test-time alignment. CRAFT treats the base simulator as a globally observable sandbox, generating diverse what-if rollouts from logged initial states to expose context-induced failures. These failures are grounded with human-aligned driving priors and converted into preference supervision for training a Contextual Preference Evaluator (CPE). At inference time, CPE acts as a plug-in alignment module that scores candidate actions under complete scene context and reweights autoregressive decoding toward globally coherent behaviors. CRAFT mitigates this local-to-global contextual bias, reducing collisions by 31.2\% and traffic violations by 33.2\% without retraining the base simulator.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes CRAFT (Contextual pReference Alignment Framework for Traffic Simulation) to address the local-to-global context mismatch in autoregressive traffic simulators. These simulators are trained on ego-centric logs with rich local observations but deployed in globally observable closed-loop settings, leading to incomplete context-action mappings that cause unrealistic behaviors. CRAFT generates self-supervised what-if rollouts from logged initial states inside a global sandbox to expose failures, grounds them using human-aligned driving priors to create preference pairs, trains a Contextual Preference Evaluator (CPE), and deploys CPE as a plug-in module to reweight autoregressive decoding toward globally coherent actions at test time. The central empirical claim is a 31.2% reduction in collisions and 33.2% reduction in traffic violations without retraining the base simulator.
Significance. If the quantitative claims are supported by detailed, reproducible experiments with appropriate controls, this approach could meaningfully advance closed-loop traffic simulation by providing a test-time alignment method that avoids costly retraining. The self-supervised failure discovery combined with preference-based reweighting is a potentially generalizable idea for mitigating distribution shifts in simulation. However, the absence of any experimental protocol, dataset description, baseline comparisons, or statistical analysis in the abstract makes it impossible to evaluate whether the reported gains are robust or attributable to the proposed components.
major comments (2)
- [Abstract] Abstract: the central claim of 31.2% collision and 33.2% violation reductions is presented with no information on experimental setup, datasets used, baselines, number of rollouts, statistical tests, or how the percentages were computed. This information is load-bearing for verifying that the gains arise from CPE reweighting rather than simulator artifacts or evaluation choices.
- [Method (implied by abstract description of rollout generation and CPE training)] The manuscript does not provide evidence that the self-supervised what-if rollouts from logged initial states systematically surface context-induced failures (incomplete context-action mappings) rather than random noise or simulator-specific artifacts. Without an ablation or diagnostic that isolates this distinction, the preference supervision signal for CPE may be misaligned, undermining the reported improvements.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive report. We address each major comment below and indicate the revisions we will incorporate.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim of 31.2% collision and 33.2% violation reductions is presented with no information on experimental setup, datasets used, baselines, number of rollouts, statistical tests, or how the percentages were computed. This information is load-bearing for verifying that the gains arise from CPE reweighting rather than simulator artifacts or evaluation choices.
Authors: We agree that the abstract's brevity leaves the central claims difficult to evaluate in isolation. The full manuscript details the experimental protocol in Section 4 (including the traffic dataset, base simulator, number of closed-loop rollouts, baseline comparisons, and relative reduction formula). To address the concern directly, we will revise the abstract to include a concise statement of the setup and evaluation (e.g., "evaluated over 500 closed-loop rollouts on logged urban scenes against standard autoregressive baselines, with percentages computed as relative reductions versus the unaligned simulator"). revision: yes
-
Referee: [Method (implied by abstract description of rollout generation and CPE training)] The manuscript does not provide evidence that the self-supervised what-if rollouts from logged initial states systematically surface context-induced failures (incomplete context-action mappings) rather than random noise or simulator-specific artifacts. Without an ablation or diagnostic that isolates this distinction, the preference supervision signal for CPE may be misaligned, undermining the reported improvements.
Authors: The reported 31.2% and 33.2% gains are measured against the base simulator without CPE, providing indirect support that the preference signal from the what-if rollouts is effective. However, we acknowledge the value of a direct diagnostic. We will add an ablation that (i) compares CPE trained on context-induced failure pairs versus randomly sampled or noise-augmented pairs and (ii) reports the resulting difference in downstream collision/violation rates. This will isolate whether the rollouts systematically expose the targeted local-to-global mismatches. revision: yes
Circularity Check
No circularity: empirical framework with no equations or self-referential derivations
full rationale
The paper presents CRAFT as a procedural framework involving self-supervised what-if rollouts, grounding with priors, CPE training, and test-time reweighting. No equations, derivations, or parameter-fitting steps are described that would reduce the reported collision/violation reductions to quantities defined by construction from the inputs. The central claims rest on empirical outcomes rather than any self-definitional, fitted-prediction, or self-citation load-bearing chain. The provided text contains no citations at all, let alone load-bearing self-citations. This is a standard non-finding for a methods paper whose gains are not mathematically forced.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Bordes, N
A. Bordes, N. Usunier, A. Garcia-Duran, and et al. Translating embeddings for modeling multi- relational data. InProceedings of the Annual Conference on Neural Information Processing Systems (NeurIPS), volume 26, 2013
2013
-
[2]
R. A. Bradley and M. E. Terry. Rank analysis of incomplete block designs: I. the method of paired comparisons.Biometrika, 39(3/4):324–345, 1952
1952
-
[3]
NuPlan: A closed-loop ML-based planning benchmark for autonomous vehicles
H. Caesar, J. Kabzan, K. S. Tan, W. K. Fong, E. Wolff, A. Lang, L. Fletcher, O. Beijbom, and S. Omari. nuplan: A closed-loop ml-based planning benchmark for autonomous vehicles.arXiv preprint arXiv:2106.11810, 2021
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[4]
Codevilla, E
F. Codevilla, E. Santana, A. M. López, and A. Gaidon. Exploring the limitations of behavior cloning for autonomous driving. InProceedings of the IEEE/CVF international conference on computer vision (ICCV), pages 9329–9338, 2019
2019
- [5]
-
[6]
Dauner, M
D. Dauner, M. Hallgarten, A. Geiger, and K. Chitta. Parting with misconceptions about learning- based vehicle motion planning. InConference on Robot Learning, pages 1268–1281. PMLR, 2023
2023
-
[7]
De Haan, D
P. De Haan, D. Jayaraman, and S. Levine. Causal confusion in imitation learning. InProceedings of the Annual Conference on Neural Information Processing Systems (NeurIPS), volume 32, 2019
2019
-
[8]
Ettinger, S
S. Ettinger, S. Cheng, B. Caine, and et al. Large scale interactive motion forecasting for autonomous driving: The waymo open motion dataset. InProceedings of the IEEE/CVF international conference on computer vision (CVPR), pages 9710–9719, 2021
2021
-
[9]
A. Fan, M. Lewis, and Y . Dauphin. Hierarchical neural story generation. InProceedings of the 56th Annual Meeting of the Association for Computational Linguistics (Volume 1: Long Papers), pages 889–898, 2018
2018
-
[10]
S. Feng, H. Sun, X. Yan, and et al. Dense reinforcement learning for safety validation of autonomous vehicles.Nature, 615(7953):620–627, 2023
2023
-
[11]
H. Gao, S. Chen, Y . Zhu, Y . Song, W. Liu, Q. Zhang, and X. Wang. Rad-2: Scaling reinforcement learning in a generator-discriminator framework.arXiv preprint arXiv:2604.15308, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[12]
Geirhos, J.-H
R. Geirhos, J.-H. Jacobsen, C. Michaelis, R. Zemel, W. Brendel, M. Bethge, and F. A. Wichmann. Shortcut learning in deep neural networks.Nature Machine Intelligence, 2(11):665–673, 2020
2020
-
[13]
Y . Hu, S. Chai, Z. Yang, and et al. Solving motion planning tasks with a scalable generative model. InProceedings of the European Conference on Computer Vision (ECCV), pages 386–404, 2024
2024
-
[14]
Huang, X
Z. Huang, X. Weng, M. Igl, and et al. Gen-drive: Enhancing diffusion generative driving policies with reward modeling and reinforcement learning fine-tuning. InProceedings of 2025 IEEE International Conference on Robotics and Automation (ICRA), pages 3445–3451, 2025
2025
- [15]
-
[16]
L. Lin, X. Lin, K. Xu, et al. Revisit mixture models for multi-agent simulation: Experimental study within a unified framework.arXiv preprint arXiv:2501.17015, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[17]
J. Lu, K. Wong, C. Zhang, and et al. Scenecontrol: Diffusion for controllable traffic scene generation. InProceedings of 2024 IEEE International Conference on Robotics and Automation (ICRA), pages 16908–16914, 2024
2024
-
[18]
S. Meng and C. Ai. Infrastructure-centric world models: Bridging temporal depth and spatial breadth for roadside perception.arXiv preprint arXiv:2604.17651, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[19]
Montali, J
N. Montali, J. Lambert, P. Mougin, and et al. The waymo open sim agents challenge. In Proceedings of the Annual Conference on Neural Information Processing Systems (NeurIPS), volume 36, pages 59151–59171, 2023
2023
-
[20]
LEAD: Minimizing Learner-Expert Asymmetry in End-to-End Driving
L. Nguyen, M. Fauth, and B. a. a. Jaeger. Lead: Minimizing learner-expert asymmetry in end-to-end driving.arXiv preprint arXiv:2512.20563, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
- [21]
-
[22]
J. Philion, X. B. Peng, and S. Fidler. Trajeglish: Traffic modeling as next-token prediction. arXiv preprint arXiv:2312.04535, 2023
-
[23]
L. Rowe, R. Girgis, A. Gosselin, and et al. Ctrl-sim: Reactive and controllable driving agents with offline reinforcement learning. InProceedings of the Conference on Robot Learning (CoRL), pages 3600–3621, 2025. 10
2025
-
[24]
A. Seff, B. Cera, D. Chen, and et al. Motionlm: Multi-agent motion forecasting as language modeling. InProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), pages 8579–8590, 2023
2023
-
[25]
C. E. Shannon. A mathematical theory of communication.The Bell system technical journal, 27(3):379–423, 1948
1948
-
[26]
C. Si, D. Friedman, N. Joshi, S. Feng, D. Chen, and H. He. Measuring inductive biases of in-context learning with underspecified demonstrations. InProceedings of the 61st Annual Meeting of the Association for Computational Linguistics (Volume 1: Long Papers), pages 11289–11310, 2023
2023
-
[27]
S. Suo, S. Regalado, S. Casas, and R. Urtasun. Trafficsim: Learning to simulate realistic multi-agent behaviors. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 10400–10409, 2021
2021
-
[28]
Vinitsky, N
E. Vinitsky, N. Lichtlé, X. Yang, and et al. Nocturne: a scalable driving benchmark for bringing multi-agent learning one step closer to the real world. InProceedings of the Annual Conference on Neural Information Processing Systems (NeurIPS), volume 35, pages 3962–3974, 2022
2022
-
[29]
M. Wang, J. Wang, T. Ye, and K. Yu. Do llm modules generalize? a study on motion generation for autonomous driving. InProceedings of the Conference on Robot Learning (CoRL), pages 4657–4683, 2025
2025
- [30]
-
[31]
Z. Wang, P. Chen, D. Li, C. Li, Q. Zhang, Z. Xia, and G. Yu. Learning rollout from sampling: An r1-style tokenized traffic simulation model.IEEE Robotics and Automation Letters, 11(5):6336– 6343, 2026
2026
-
[32]
Argoverse 2: Next Generation Datasets for Self-Driving Perception and Forecasting
B. Wilson, W. Qi, T. Agarwal, J. Lambert, J. Singh, S. Khandelwal, B. Pan, R. Kumar, A. Hart- nett, J. K. Pontes, et al. Argoverse 2: Next generation datasets for self-driving perception and forecasting.arXiv preprint arXiv:2301.00493, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[33]
W. Wu, X. Feng, Z. Gao, and Y . Kan. Smart: Scalable multi-agent real-time motion generation via next-token prediction. InProceedings of the Annual Conference on Neural Information Processing Systems (NeurIPS), volume 37, pages 114048–114071, 2024
2024
-
[34]
X. Yan, Z. Zou, S. Feng, and et al. Learning naturalistic driving environment with statistical realism.Nature communications, 14(1):2037, 2023
2037
-
[35]
Zhang, P
Z. Zhang, P. Karkus, M. Igl, and et al. Closed-loop supervised fine-tuning of tokenized traffic models. InProceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 5422–5432, 2025
2025
-
[36]
Zhang, A
Z. Zhang, A. Liniger, D. Dai, and et al. Trafficbots: Towards world models for autonomous driving simulation and motion prediction. InProceedings of the IEEE International Conference on Robotics and Automation (ICRA), pages 1522–1529, 2023
2023
-
[37]
S. Z. Zhao, L. Wang, H. Ruan, Y . Bao, Y . Chen, Z. Leng, A. Ravichandran, H. He, Z. Zhou, X. Han, et al. Bridgesim: Unveiling the ol-cl gap in end-to-end autonomous driving.arXiv preprint arXiv:2604.10856, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[38]
Zhong, D
Z. Zhong, D. Rempe, D. Xu, and et al. Guided conditional diffusion for controllable traffic simulation. InProceedings of 2023 IEEE International Conference on Robotics and Automation (ICRA), pages 3560–3566. IEEE, 2023
2023
-
[39]
Y . Zhou, N. Ye, W. Ljungbergh, and et al. Decoupled diffusion sparks adaptive scene generation. InProceedings of the IEEE/CVF International Conference on Computer Vision (CVPR), pages 27760–27770, 2025
2025
-
[40]
Z. Zhou, H. Haibo, X. Chen, J. Wang, N. Guan, K. Wu, Y .-H. Li, Y .-K. Huang, and C. J. Xue. Behaviorgpt: Smart agent simulation for autonomous driving with next-patch prediction. In Proceedings of the Annual Conference on Neural Information Processing Systems (NeurIPS), volume 37, pages 79597–79617, 2024
2024
-
[41]
Z. Zhou, J. Wang, Y .-H. Li, and Y .-K. Huang. Query-centric trajectory prediction. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition (CVPR), pages 17863– 17873, 2023. 11 In this supplementary material, we provide additional details in a question-driven manner to support the methodology and experiments discussed in the ma...
2023
-
[42]
A time step is included inV col if no such violation is detected
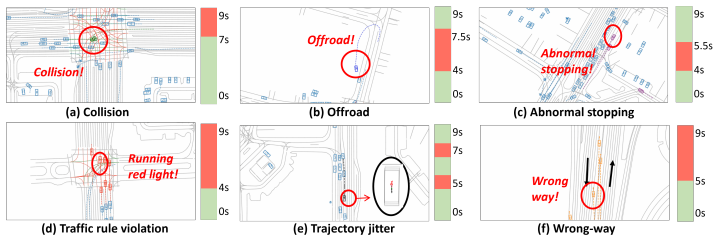
Safety • Collision (Vcol): We check whether an agent in the scene exhibits any explicit collision or hazardous spatial conflict with other agents over the entire time horizon. A time step is included inV col if no such violation is detected
-
[43]
A time step is included in Vstop if no such violation is detected
Compliance • Abnormal stopping (Vstop): We check whether an agent undergoes substantial deceleration and comes to an evident stop from a normal driving state when there is no leading blocking vehicle, no red light, and no large-angle turning maneuver ahead. A time step is included in Vstop if no such violation is detected. • Traffic rule violation(Vtraffi...
-
[44]
A time step is included in Vjitter if no such violation is detected
Kinematics • Trajectory jitter (Vjitter): We check whether an agent exhibits abnormal back-and-forth jittering in the lateral or longitudinal direction. A time step is included in Vjitter if no such violation is detected. Consequently, the final valid set V is strictly defined as the intersection of all individual criterion sets: V=V col ∩ Vstop ∩ Vtraffi...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.