PalpAid: Multimodal Pneumatic Tactile Sensor for Tissue Palpation
Pith reviewed 2026-05-16 20:55 UTC · model grok-4.3
The pith
A compact pneumatic sensor with built-in microphone classifies tissue stiffness by turning contact force into pressure changes and sound patterns.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
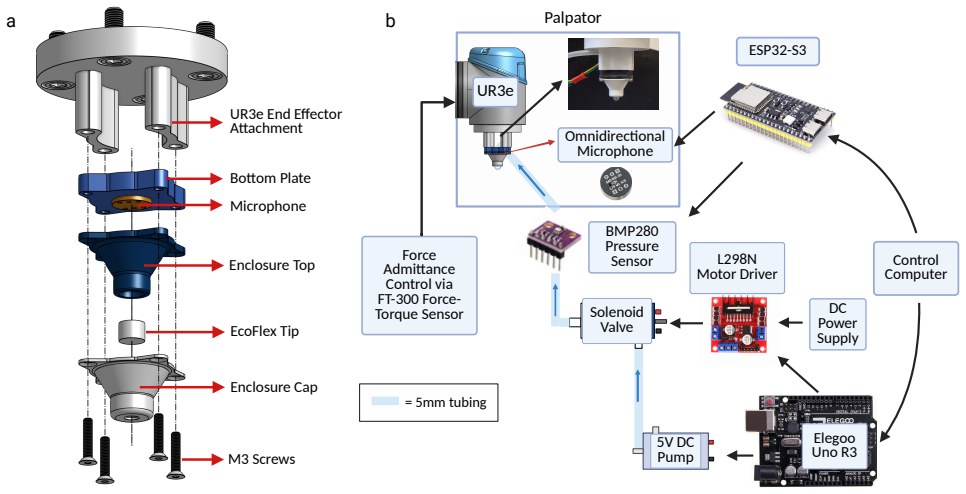
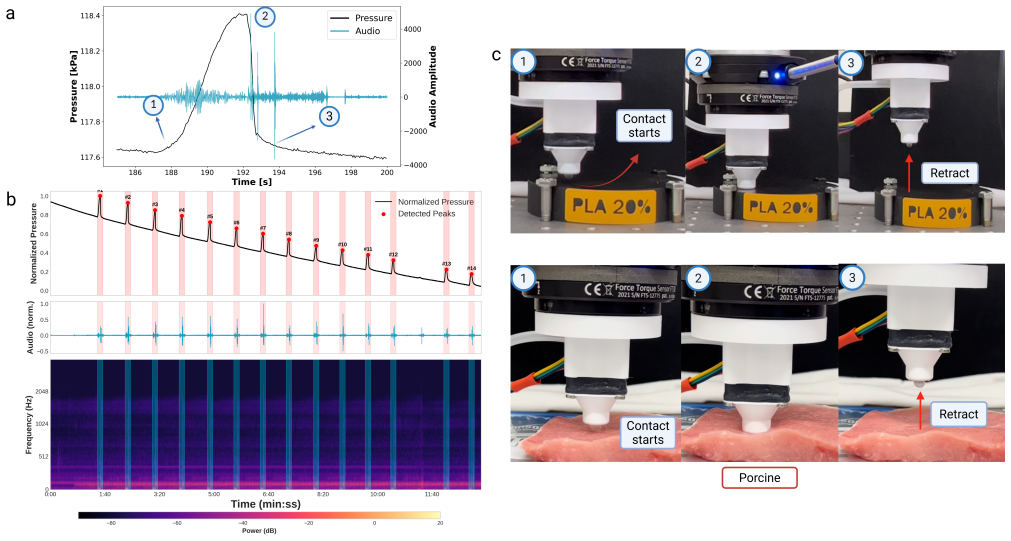
PalpAid is a multimodal pneumatic tactile sensor equipped with a microphone and pressure sensor that converts contact force into an internal pressure differential. The pressure sensor acts as an event detector, while the acoustic signature assists in tissue identification. Characterization confirms robustness to repeated cycles and robotic integration. The sensor classifies 3D-printed hard objects with varying infills and soft ex vivo tissues, supporting easy retrofitting to surgical robotic systems for soft tissue palpation.
What carries the argument
Multimodal pneumatic tactile unit that converts contact force into measurable internal pressure differential, using the pressure sensor for contact detection and the microphone for acoustic tissue signatures.
If this is right
- The sensor enables classification of tissue elasticity and stiffness during robot-assisted procedures.
- It integrates directly with existing robotic arms for palpation without workflow changes.
- Repeated use tests confirm the device maintains performance across multiple contact cycles.
- Pressure and acoustic data together support boundary detection between normal and pathological tissue.
Where Pith is reading between the lines
- Combining the acoustic data with simple machine-learning models could raise classification reliability when noise levels vary.
- The same pressure-to-sound conversion might apply to other minimally invasive tools where visual cues are limited.
- Real-time haptic feedback loops could be added to the robotic control system using the sensor output.
- Longer-term use in live surgery would test whether the pneumatic design stays sterile and leak-free.
Load-bearing premise
The acoustic signature captured by the microphone can distinguish tissue types without being overwhelmed by operating-room noise or other interference.
What would settle it
Running the sensor on ex vivo tissues inside a simulated noisy surgical environment and finding that acoustic-based classification accuracy falls below the level shown in the quiet lab tests.
Figures
read the original abstract
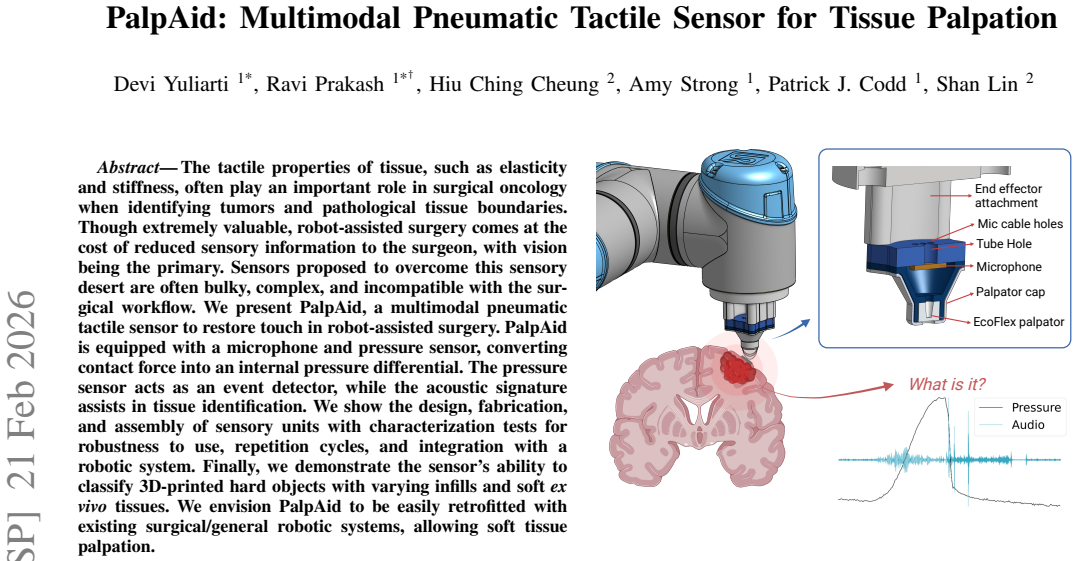
The tactile properties of tissue, such as elasticity and stiffness, often play an important role in surgical oncology when identifying tumors and pathological tissue boundaries. Though extremely valuable, robot-assisted surgery comes at the cost of reduced sensory information to the surgeon, with vision being the primary. Sensors proposed to overcome this sensory desert are often bulky, complex, and incompatible with the surgical workflow. We present PalpAid, a multimodal pneumatic tactile sensor to restore touch in robot-assisted surgery. PalpAid is equipped with a microphone and pressure sensor, converting contact force into an internal pressure differential. The pressure sensor acts as an event detector, while the acoustic signature assists in tissue identification. We show the design, fabrication, and assembly of sensory units with characterization tests for robustness to use, repetition cycles, and integration with a robotic system. Finally, we demonstrate the sensor's ability to classify 3D-printed hard objects with varying infills and soft ex vivo tissues. We envision PalpAid to be easily retrofitted with existing surgical/general robotic systems, allowing soft tissue palpation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents PalpAid, a compact multimodal pneumatic tactile sensor for robot-assisted surgery that uses a pressure sensor as an event detector and a microphone to capture acoustic signatures for tissue identification. It describes the sensor design, fabrication, assembly, robustness characterization (repetition cycles and use), robotic integration, and experimental demonstrations of classifying 3D-printed hard objects with varying infills as well as soft ex vivo tissues.
Significance. If the acoustic modality can be shown to contribute discriminative information under realistic conditions, the work would offer a practical, retrofittable solution to the loss of tactile feedback in minimally invasive procedures, potentially aiding tumor boundary detection. The pneumatic approach and dual-modality sensing are conceptually attractive for surgical workflows, but the current evidence base is too preliminary to establish clinical relevance.
major comments (3)
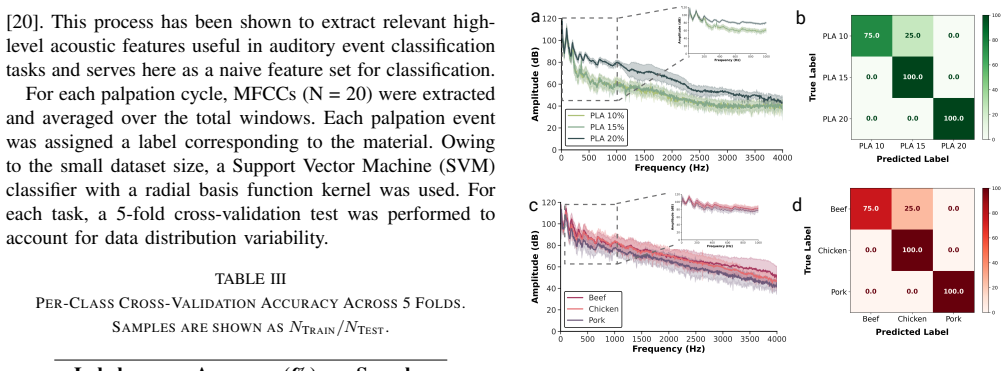
- [classification experiments] The central claim that the microphone's acoustic signature assists in tissue identification (Abstract and classification demonstration) is not supported by quantitative evidence. No signal-to-noise ratio measurements, ablation studies (performance with vs. without acoustic channel), or confusion matrices are provided to show that the acoustic modality adds value beyond the pressure signal alone.
- [results on tissue classification] The experimental setup for both 3D-printed object and ex vivo tissue classification lacks controls for confounding variables such as variable contact force, probe angle, or indentation depth. Without these, it is impossible to determine whether classification success is due to the sensor or to uncontrolled experimental conditions.
- [characterization tests] No robustness testing of the acoustic channel under realistic operating-room noise levels (50–80 dB from equipment) is reported. The manuscript therefore provides no evidence that the claimed tissue-identification capability would survive typical surgical acoustic interference.
minor comments (2)
- [sensor operation] The abstract states that the pressure sensor 'acts as an event detector' but the manuscript does not define the detection threshold or the precise signal-processing steps used to trigger acoustic recording.
- [figures] Figure captions and axis labels for the classification results should explicitly state the number of trials, cross-validation method, and whether error bars represent standard deviation or standard error.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below, acknowledging where the current evidence is preliminary and outlining specific revisions to strengthen the quantitative support for our claims.
read point-by-point responses
-
Referee: The central claim that the microphone's acoustic signature assists in tissue identification (Abstract and classification demonstration) is not supported by quantitative evidence. No signal-to-noise ratio measurements, ablation studies (performance with vs. without acoustic channel), or confusion matrices are provided to show that the acoustic modality adds value beyond the pressure signal alone.
Authors: We acknowledge that the manuscript lacks explicit ablation studies, SNR measurements, and confusion matrices to isolate the acoustic channel's contribution. The presented classification results rely on multimodal data where acoustic signatures provide the primary discriminative features, but we agree this requires quantitative validation. In the revised manuscript we will add confusion matrices for both the 3D-printed object and ex vivo tissue experiments along with an ablation study comparing classifier performance using pressure-only versus combined pressure-acoustic inputs. revision: yes
-
Referee: The experimental setup for both 3D-printed object and ex vivo tissue classification lacks controls for confounding variables such as variable contact force, probe angle, or indentation depth. Without these, it is impossible to determine whether classification success is due to the sensor or to uncontrolled experimental conditions.
Authors: We agree that uncontrolled variation in contact parameters could confound results. The experiments used a robotic arm to enforce consistent indentation depth and probe orientation, with force monitored via the pressure channel, but these controls were not explicitly documented or varied systematically. We will revise the methods section to detail the fixed parameters, report trial-to-trial consistency metrics, and include a brief sensitivity analysis on minor force variations. revision: partial
-
Referee: No robustness testing of the acoustic channel under realistic operating-room noise levels (50–80 dB from equipment) is reported. The manuscript therefore provides no evidence that the claimed tissue-identification capability would survive typical surgical acoustic interference.
Authors: We recognize that the absence of OR-noise testing limits claims about real-world utility. Current robustness characterization addressed mechanical repetition cycles and durability in a controlled laboratory environment. We will add new experiments exposing the sensor to calibrated 50–80 dB broadband and equipment-like noise while repeating the tissue classification tasks, reporting any degradation in acoustic feature quality and classification accuracy. revision: yes
Circularity Check
No circularity: experimental hardware demonstration without derivations or self-referential predictions
full rationale
The paper describes sensor design, fabrication, characterization tests for robustness and repetition, robotic integration, and direct experimental classification of 3D-printed objects and ex vivo tissues using pressure and acoustic signals. No equations, parameter fitting, predictions derived from fitted inputs, or load-bearing self-citations appear in the provided text. The classification results are presented as empirical outcomes from measurements rather than any chain that reduces to its own inputs by construction. This is a standard self-contained experimental report with no derivation steps to analyze for circularity.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The pressure sensor acts as an event detector, while the acoustic signature assists in tissue identification... MFCC... SVM classifier
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
The importance of pal- pation in the skin cancer screening examination,
B. G. Gorman, J. Hanson, and N. Y . Vidal, “The importance of pal- pation in the skin cancer screening examination,”Journal of Cosmetic Dermatology, vol. 20, no. 12, pp. 3982–3985, 2021
work page 2021
-
[2]
D. Shetty, B. V . Jayade, S. K. Joshi, and K. Gopalkrishnan, “Accuracy of palpation, ultrasonography, and computed tomography in the eval- uation of metastatic cervical lymph nodes in head and neck cancer,” Indian journal of dentistry, vol. 6, no. 3, p. 121, 2015
work page 2015
-
[3]
M. C. Moschovas, S. Saikali, A. Gamal, S. Reddy, T. Rogers, M. C. Sighinolfi, B. Rocco, and V . Patel, “First impressions of the new da vinci 5 robotic platform and experience in performing robot-assisted radical prostatectomy,”European Urology Open Science, vol. 69, pp. 1–4, 2024
work page 2024
-
[4]
Y .-H. Su, K. Huang, and B. Hannaford, “Multicamera 3d recon- struction of dynamic surgical cavities: Non-rigid registration and point classification,” in2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2019, pp. 7911–7918
work page 2019
-
[5]
Gelsight: High-resolution robot tactile sensors for estimating geometry and force,
W. Yuan, S. Dong, and E. H. Adelson, “Gelsight: High-resolution robot tactile sensors for estimating geometry and force,”Sensors, vol. 17, no. 12, p. 2762, 2017
work page 2017
-
[6]
Q. Zhang, Z. Zuo, H. Wang, B. Liu, Y . Yilihamu, and L. Wen, “Utact: Underwater vision-based tactile sensor with geometry recon- struction and contact force estimation,”Advanced Robotics Research, p. 202500091, 2025
work page 2025
-
[7]
Omnisense v2: A human-skin inspired visuotactile sensor for unified tactile imaging,
T. J. T. Tiong and A. R. See, “Omnisense v2: A human-skin inspired visuotactile sensor for unified tactile imaging,”IEEE Sensors Journal, 2025
work page 2025
-
[8]
Tacscope: A miniaturized vision-based tactile sensor for surgical applications,
M. R. I. Prince, S. Athar, P. Zhou, and Y . She, “Tacscope: A miniaturized vision-based tactile sensor for surgical applications,” Advanced Robotics Research, p. e202500117, 2025
work page 2025
-
[9]
Using fiber optic bundles to miniaturize vision-based tactile sensors,
J. Di, Z. Dugonjic, W. Fu, T. Wu, R. Mercado, K. Sawyer, V . R. Most, G. Kammerer, S. Speidel, R. E. Fan,et al., “Using fiber optic bundles to miniaturize vision-based tactile sensors,”IEEE Transactions on Robotics, 2024
work page 2024
-
[10]
S. Kapuria, J. Bonyun, Y . Kulkarni, N. Ikoma, S. Chinchali, and F. Alambeigi, “Robot-enabled machine learning-based diagnosis of gastric cancer polyps using partial surface tactile imaging,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 2360–2365
work page 2024
-
[11]
Passive and active acoustic sensing for soft pneumatic actuators,
V . Wall, G. Z ¨oller, and O. Brock, “Passive and active acoustic sensing for soft pneumatic actuators,”The International Journal of Robotics Research, vol. 42, no. 3, pp. 108–122, 2023
work page 2023
-
[12]
Acoustac: Tactile sensing with acoustic resonance for electronics-free soft skin,
M. S. Li and H. S. Stuart, “Acoustac: Tactile sensing with acoustic resonance for electronics-free soft skin,”Soft Robotics, vol. 12, no. 1, pp. 109–123, 2025
work page 2025
-
[13]
Acoustic soft tactile skin (ast skin),
W. Mandil, K. Nazari, S. Parsons, A. Ghalamzan,et al., “Acoustic soft tactile skin (ast skin),” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 4105–4111
work page 2024
-
[14]
I. Andrussow, J. Solano, B. A. Richardson, G. Martius, and K. J. Kuchenbecker, “Adding internal audio sensing to internal vision en- ables human-like in-hand fabric recognition with soft robotic finger- tips,” in2025 IEEE-RAS 24th International Conference on Humanoid Robots (Humanoids). IEEE, 2025, pp. 01–08
work page 2025
-
[15]
E. Bao, C. Fang, and D. Song, “A miniaturized and low-cost fin- gertip optoacoustic pretouch sensor for near-distance ranging and material/structure classification,”IEEE Sensors Journal, 2025
work page 2025
-
[16]
Where is the boundary? multimodal sensor fusion test bench for tissue boundary delineation,
Z. Chen, A. C. Cahilig, S. Dias, P. Kolar, R. Prakash, and P. J. Codd, “Where is the boundary? multimodal sensor fusion test bench for tissue boundary delineation,” inIEEE-EMBS International Conference on Body Sensor Networks 2025, 2025
work page 2025
-
[17]
R. Prakash, “Created in biorender,” https://BioRender.com/m0xbfmk, 2025, created with BioRender.com
work page 2025
-
[18]
R. Janardhana, F. Akram, Z. Guler, A. Adaval, and N. Jackson, “A comprehensive experimental, simulation, and characterization mechan- ical analysis of ecoflex and its formulation under uniaxial testing,” Materials, vol. 18, no. 13, p. 3037, 2025
work page 2025
-
[19]
Ecoflex™ 00-20 product information,
I. Smooth-On, “Ecoflex™ 00-20 product information,” https://www. smooth-on.com/products/ecoflex-00-20/, 2025, accessed: 2025-10-30
work page 2025
-
[20]
Classification of speech dysfluencies with mfcc and lpcc features,
O. C. Ai, M. Hariharan, S. Yaacob, and L. S. Chee, “Classification of speech dysfluencies with mfcc and lpcc features,”Expert Systems with Applications, vol. 39, no. 2, pp. 2157–2165, 2012
work page 2012
-
[21]
A modular pneumatic soft gripper design for aerial grasping and landing,
H. C. Cheung, C.-W. Chang, B. Jiang, C.-Y . Wen, and H. K. Chu, “A modular pneumatic soft gripper design for aerial grasping and landing,” in2024 IEEE 7th International Conference on Soft Robotics (RoboSoft), 2024, pp. 82–88
work page 2024
-
[22]
Brain-mimicking phantom for photoablation and visualization,
R. Prakash, K. K. Yamamoto, S. R. Oca, W. Ross, and P. J. Codd, “Brain-mimicking phantom for photoablation and visualization,” in 2023 International Symposium on Medical Robotics (ISMR). IEEE, 2023, pp. 1–7
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.