When Search Becomes Memory: Turning Robot Design Trials into Transferable Skills
Pith reviewed 2026-06-29 21:22 UTC · model grok-4.3
The pith
Auto-Robotist turns robot design search results into an explicit natural-language skill library that improves initial performance and transfers to larger spaces better than genetic algorithms alone.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
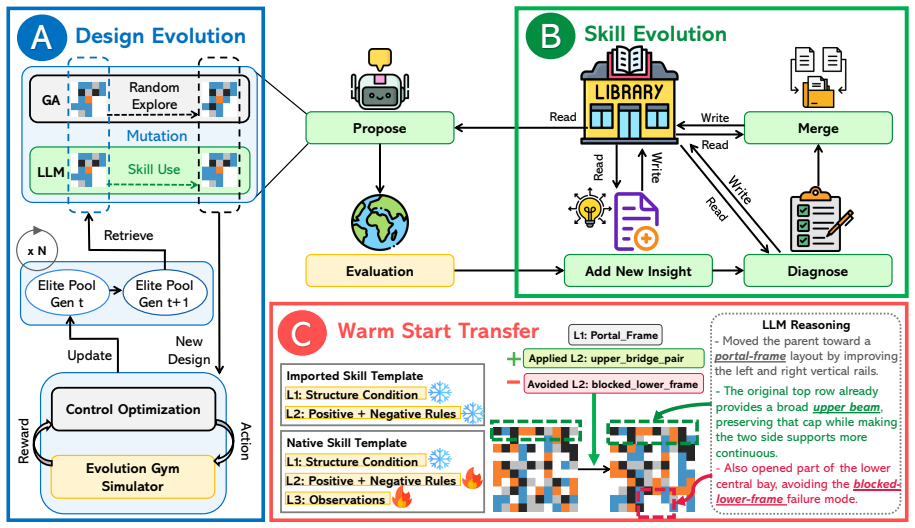
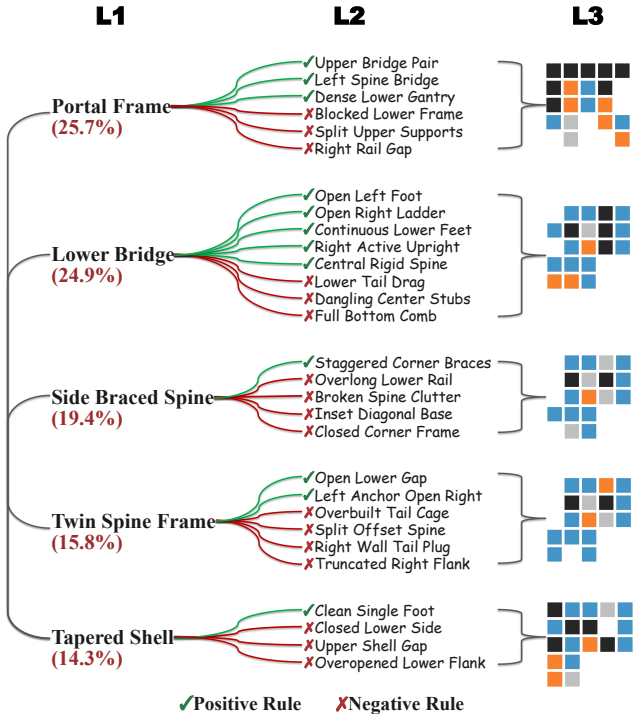
By distilling morphology-search traces into an explicit natural-language skill library that stores structural archetypes, evidence-grounded positive and negative rules, and the evaluated designs that support them, Auto-Robotist allows an LLM agent to retrieve skills that condition LLM edits of elite bodies while retaining a Genetic Algorithm mutation path; after evaluation the library is updated through Add, Diagnose, and Merge operations, producing better cold-start performance on 5x5 spaces and reference-conditioned transfer that outperforms GA on every 10x10 task tested.
What carries the argument
The skill library that stores structural archetype, evidence-grounded rules, and supporting designs so that retrieved entries can condition LLM proposals during search.
If this is right
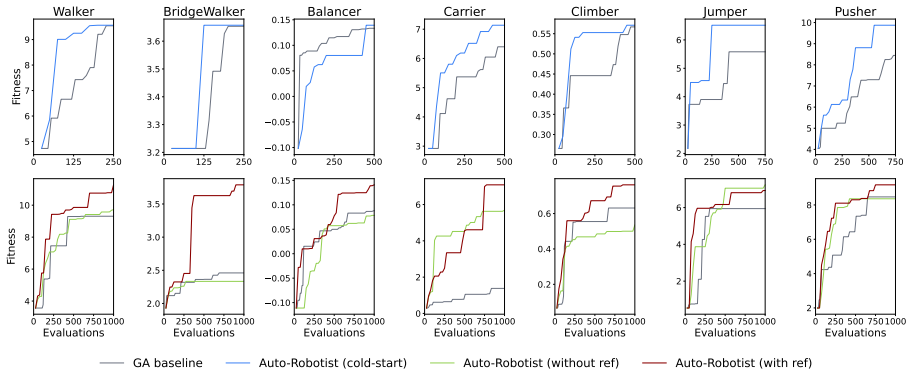
- Improves cold-start performance on 5x5 searches across locomotion, traversal, and object-interaction tasks.
- Enables learned skills to transfer to 10x10 spaces where reference-conditioned search beats GA on every task.
- Makes design memory explicit and inspectable rather than implicit inside a population.
- Supports ongoing library updates through Add, Diagnose, and Merge after each evaluation round.
Where Pith is reading between the lines
- The same library structure could be used to share design knowledge across entirely different robot tasks or simulators without retraining from scratch.
- If the verbalized skills prove stable, the method could lower the total number of expensive evaluations needed by reusing past results across multiple design problems.
- The approach might extend to other evolutionary search domains where trial outcomes can be turned into verbal rules, such as molecule or material design.
- The inspectable library opens the possibility of human review or editing of the stored principles before they are reused.
Load-bearing premise
The assumption that LLM-generated natural-language skills accurately capture generalizable design principles without distortion or loss of critical information when retrieved and applied to new design spaces.
What would settle it
Transfer experiments on the 10x10 design spaces in which reference-conditioned transfer fails to outperform plain GA on any of the seven tasks.
Figures
read the original abstract
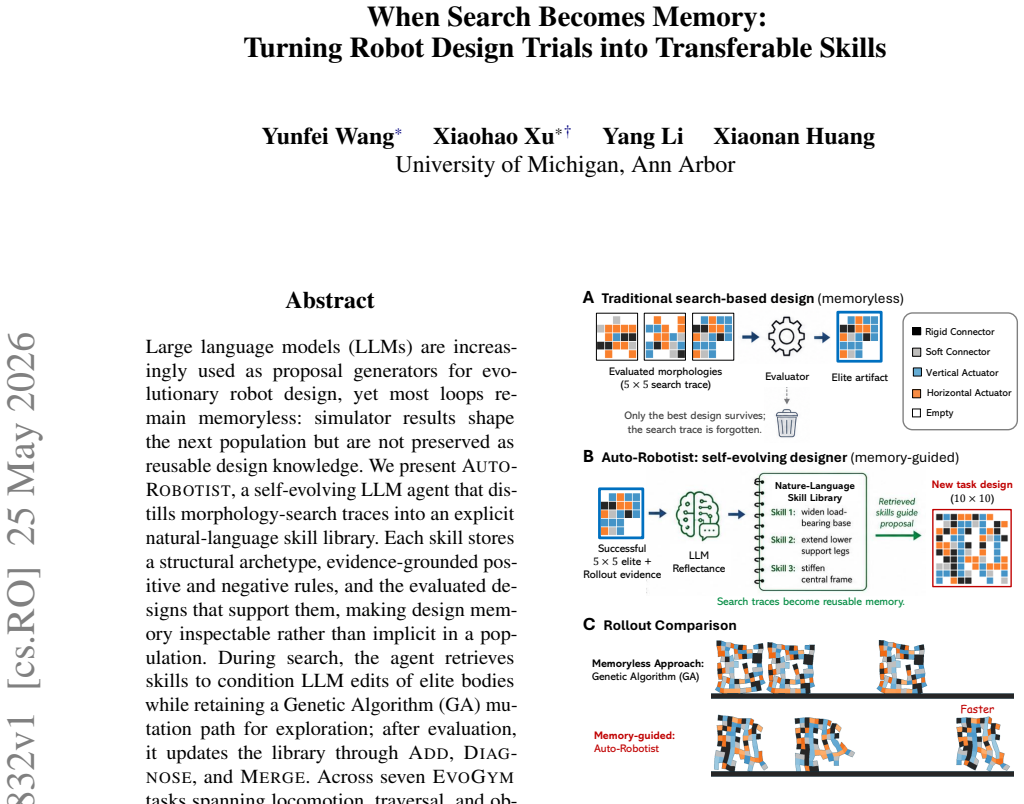
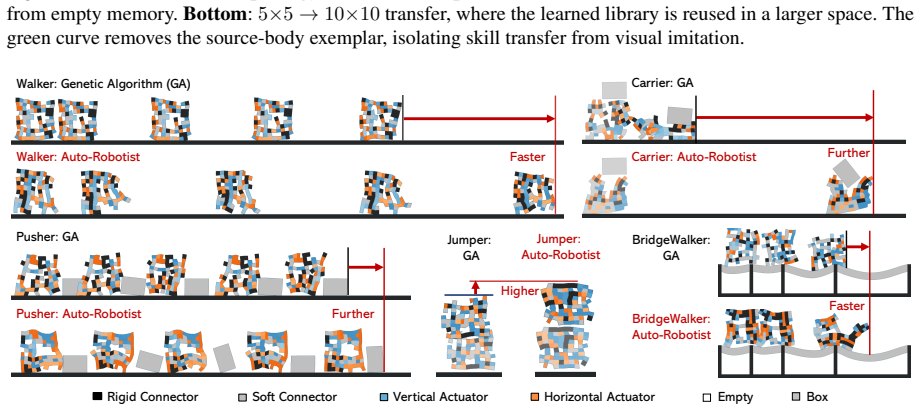
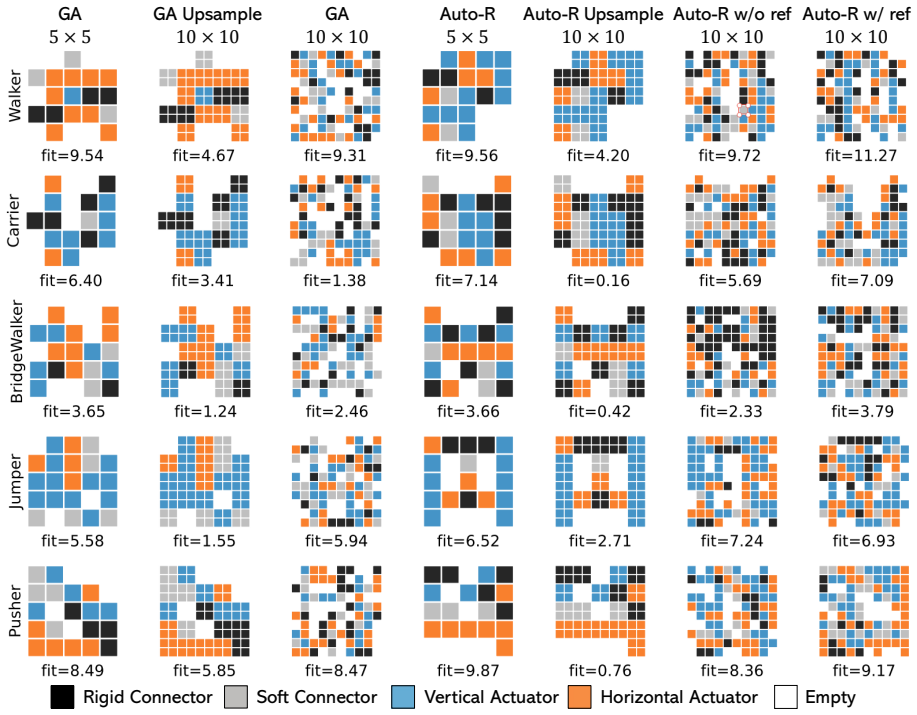
Large language models (LLMs) are increasingly used as proposal generators for evolutionary robot design, yet most loops remain memoryless: simulator results shape the next population but are not preserved as reusable design knowledge. We present Auto-Robotist, a self-evolving LLM agent that distills morphology-search traces into an explicit natural-language skill library. Each skill stores a structural archetype, evidence-grounded positive and negative rules, and the evaluated designs that support them, making design memory inspectable rather than implicit in a population. During search, the agent retrieves skills to condition LLM edits of elite bodies while retaining a Genetic Algorithm (GA) mutation path for exploration; after evaluation, it updates the library through Add, Diagnose, and Merge. Across seven EvoGym tasks spanning locomotion, traversal, and object interaction, Auto-Robotist improves cold-start 5x5 search and transfers learned skills to 10x10 design spaces, where reference-conditioned transfer outperforms GA on every task. These results suggest that LLM agents can convert expensive physical evaluations into reusable, auditable design principles. Our code will be released upon acceptance.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Auto-Robotist, a self-evolving LLM agent for evolutionary robot morphology design in EvoGym. It distills search traces into an explicit natural-language skill library (storing archetypes, positive/negative rules, and supporting designs), retrieves skills to condition LLM edits of elite bodies during search (while retaining a GA mutation path), and updates the library via Add/Diagnose/Merge operations. Empirical claims include improved cold-start performance on 5x5 design spaces and successful transfer to 10x10 spaces, where reference-conditioned transfer outperforms GA across all seven tasks spanning locomotion, traversal, and object interaction.
Significance. If the transfer results hold with rigorous quantification, the work would be significant for demonstrating how LLM agents can convert expensive simulator evaluations into inspectable, reusable design principles rather than leaving knowledge implicit in populations. This addresses a gap in memoryless evolutionary design loops and could enable more efficient scaling to larger design spaces.
major comments (2)
- [Abstract] Abstract: The central empirical claims of 'improves cold-start 5x5 search' and 'outperforms GA on every task' in 10x10 transfer are stated without any quantitative metrics, error bars, statistical tests, or ablation details on skill retrieval/application. This is load-bearing for the main result and prevents assessment of effect size or robustness.
- [Method (skill library construction and retrieval)] The assumption that LLM-generated natural-language skills capture generalizable design principles without distortion is central to the transfer claim but receives no direct validation (e.g., via human review of skill fidelity or controlled ablations removing the skill library).
minor comments (2)
- [Method] The description of the Add/Diagnose/Merge update rules would benefit from pseudocode or a flowchart to clarify the exact decision logic and prevent ambiguity in reproduction.
- [Method] Clarify the exact mechanism for 'reference-conditioned transfer' (e.g., how retrieved skills are injected into the LLM prompt) to distinguish it from standard few-shot prompting.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the two major comments point-by-point below, agreeing where the manuscript is currently deficient and outlining concrete revisions.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central empirical claims of 'improves cold-start 5x5 search' and 'outperforms GA on every task' in 10x10 transfer are stated without any quantitative metrics, error bars, statistical tests, or ablation details on skill retrieval/application. This is load-bearing for the main result and prevents assessment of effect size or robustness.
Authors: We agree that the abstract presents the claims qualitatively and omits the supporting numbers, error bars, and statistical details needed to evaluate effect size. In the revised version we will rewrite the abstract to report concrete metrics (e.g., mean fitness improvement percentages with standard deviations across runs, and p-values from paired statistical tests versus GA) together with a brief statement of the key ablation outcomes on skill retrieval. revision: yes
-
Referee: [Method (skill library construction and retrieval)] The assumption that LLM-generated natural-language skills capture generalizable design principles without distortion is central to the transfer claim but receives no direct validation (e.g., via human review of skill fidelity or controlled ablations removing the skill library).
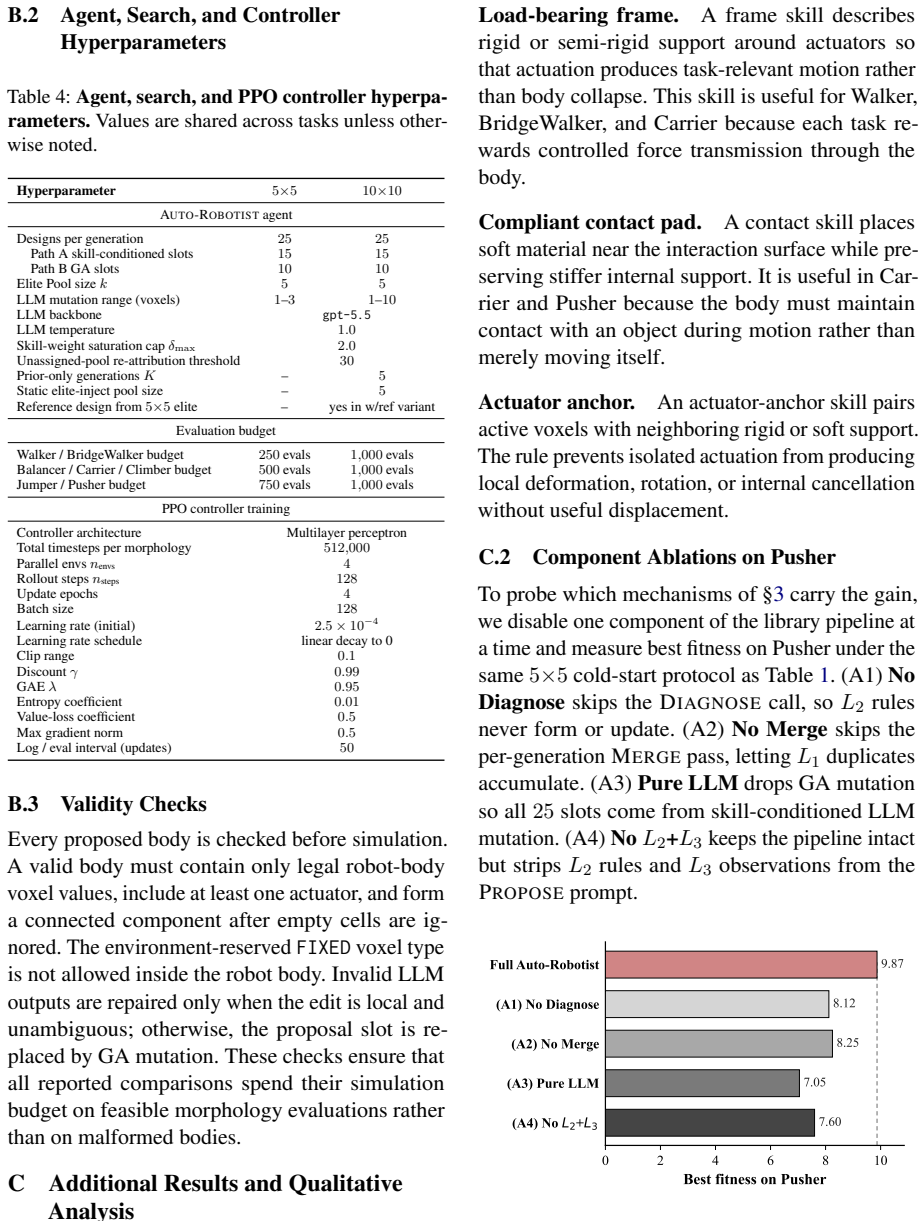
Authors: The observation is correct: the manuscript provides no direct validation of skill fidelity and relies solely on downstream transfer performance. We will add (1) a controlled ablation that disables skill retrieval while keeping all other components fixed and reports the resulting performance drop, and (2) a qualitative appendix that presents representative skills alongside the search-trace evidence that generated them, allowing readers to judge fidelity. A full-scale human review of every skill is not feasible within the current experimental budget, but the added ablation and example analysis will supply the requested direct evidence. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper describes an empirical LLM-based agent (Auto-Robotist) that maintains an explicit skill library distilled from morphology search traces, then uses retrieval to condition edits during search on EvoGym tasks. All reported gains are framed as direct experimental comparisons against GA baselines in 5x5 and 10x10 design spaces. No equations, parameter fits, predictions, or uniqueness theorems appear; the method is self-contained as a procedural pipeline whose validity rests on observable transfer performance rather than any derivation that reduces to its own inputs by construction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption LLMs can distill simulation outcomes into accurate, generalizable natural-language design rules without significant hallucination or information loss
invented entities (1)
-
Skill library
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Jiawei Fang, Yuxuan Sun, Chengtian Ma, Qiuyu Lu, and Lining Yao
Dreamcoder: growing generalizable, inter- pretable knowledge with wake–sleep bayesian pro- gram learning.Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engi- neering Sciences, 381(2251). Jiawei Fang, Yuxuan Sun, Chengtian Ma, Qiuyu Lu, and Lining Yao. 2025. Robomore: Llm-based robot co-design via joint optimization of morpho...
-
[2]
Memory os of ai agent. InProceedings of the 2025 Conference on Empirical Methods in Natural Language Processing, pages 25972–25981. Joel Lehman, Jonathan Gordon, Shawn Jain, Kamal Ndousse, Cathy Yeh, and Kenneth O Stanley. 2023. Evolution through large models. InHandbook of evolutionary machine learning, pages 331–366. Springer. Muhan Li, Lingji Kong, and...
-
[3]
Ryan P Ringel, Zachary S Charlick, Jiaxun Liu, Boxi Xia, and Boyuan Chen
Quality diversity: A new frontier for evolu- tionary computation.Frontiers in Robotics and AI, 3:40. Ryan P Ringel, Zachary S Charlick, Jiaxun Liu, Boxi Xia, and Boyuan Chen. 2025. Text2robot: Evolu- tionary robot design from text descriptions. In2025 IEEE International Conference on Robotics and Au- tomation (ICRA), pages 5789–5797. IEEE. Rana Salama, Ja...
2025
-
[4]
Proximal Policy Optimization Algorithms
Meminsight: Autonomous memory augmen- tation for llm agents. InProceedings of the 2025 Conference on Empirical Methods in Natural Lan- guage Processing, pages 33124–33140. John Schulman, Filip Wolski, Prafulla Dhariwal, Alec Radford, and Oleg Klimov. 2017. Proximal policy optimization algorithms.arXiv preprint arXiv:1707.06347. Karl Sims. 2023. Evolving v...
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[5]
Large language models as optimizers. InIn- ternational Conference on Learning Representations, volume 2024, pages 12028–12068. Ye Yuan, Yuda Song, Zhengyi Luo, Wen Sun, and Kris Kitani. 2021. Transform2act: Learning a transform- and-control policy for efficient agent design.arXiv preprint arXiv:2110.03659. A Prompt Templates This appendix lists the prompt...
-
[6]
If the skill has no L2 rules yet, still move the parent toward the L1 condition
Direction from the assigned skill: Use the skill's L1 condition as the target structural archetype for that slot. If the skill has no L2 rules yet, still move the parent toward the L1 condition
-
[7]
pos_0",
Tactics from L2 rules and exact-parent history: Use L2 positive rules as helpful sub-patterns when they fit this parent. Avoid L2 negative rules when relevant. Use exact-parent history to avoid repeats and avoid edits that already failed on this parent. Each history entry gives you raw evidence only: - the exact child_fitness achieved on this parent - the...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.