RayDer: Scalable Self-Supervised Novel View Synthesis from Real-World Video
Pith reviewed 2026-06-28 22:48 UTC · model grok-4.3
The pith
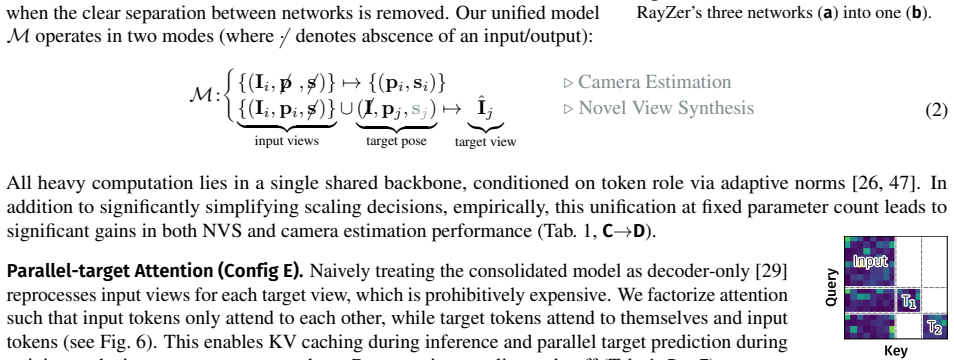
RayDer consolidates camera estimation, reconstruction and rendering into one transformer for scalable self-supervised novel view synthesis from video.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
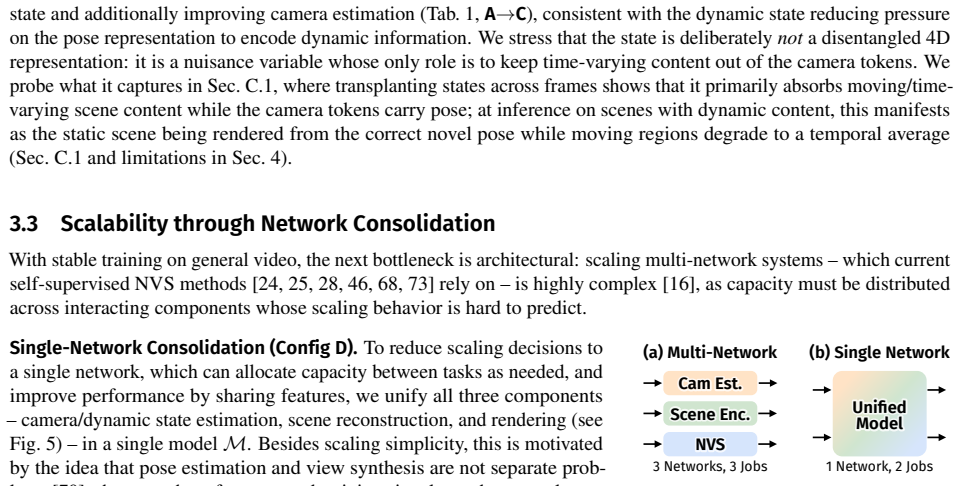
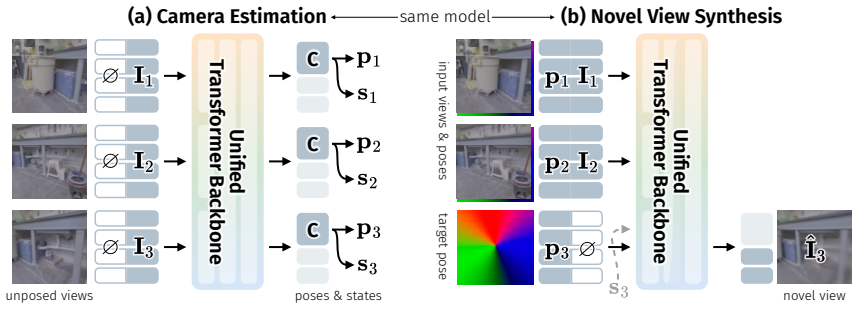
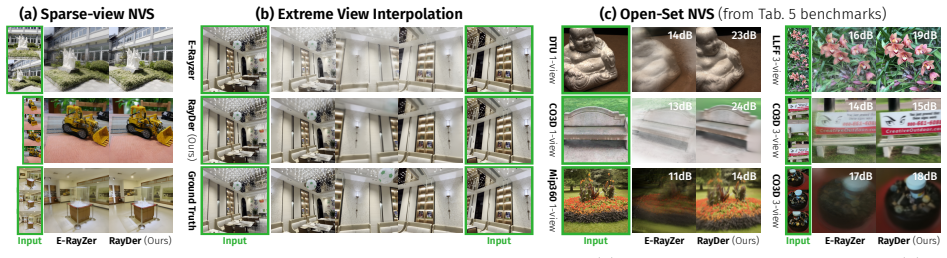
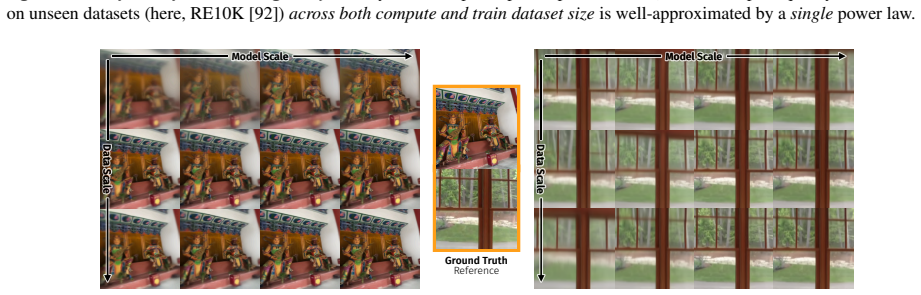
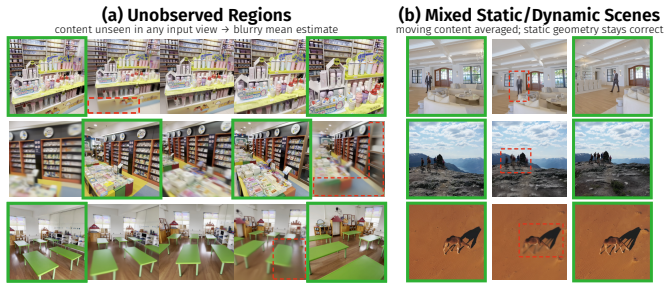
RayDer is a unified feed-forward transformer that consolidates camera estimation, scene reconstruction, and rendering into a single backbone. A minimal dynamic state treated as a nuisance factor absorbs time-varying content, enabling stable training on unconstrained real-world video while keeping static-scene NVS as the target task. The model exhibits clean power-law scaling with data and compute and outperforms static-scene data mixtures, achieving strong zero-shot open-set performance competitive with state-of-the-art supervised approaches.
What carries the argument
Unified feed-forward transformer backbone integrating camera estimation, scene reconstruction and rendering, with minimal dynamic state as nuisance factor for handling video dynamics.
If this is right
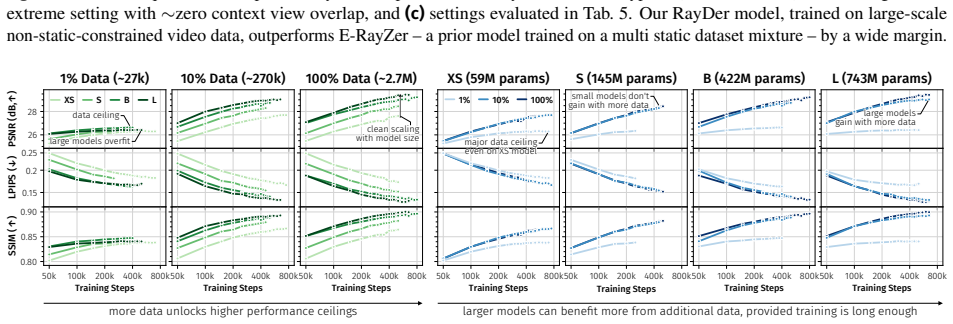
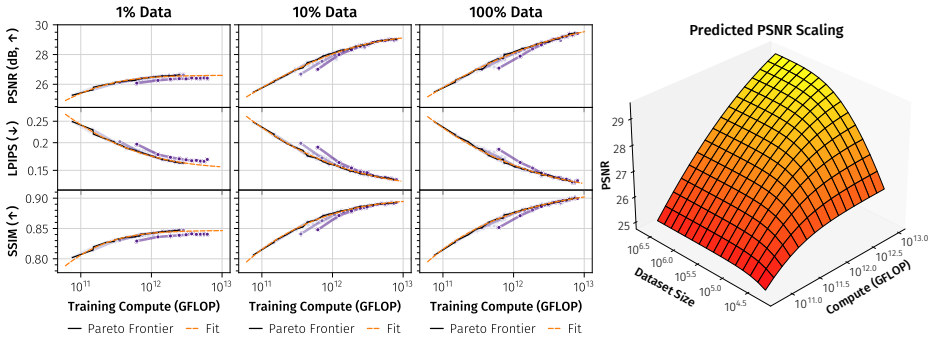
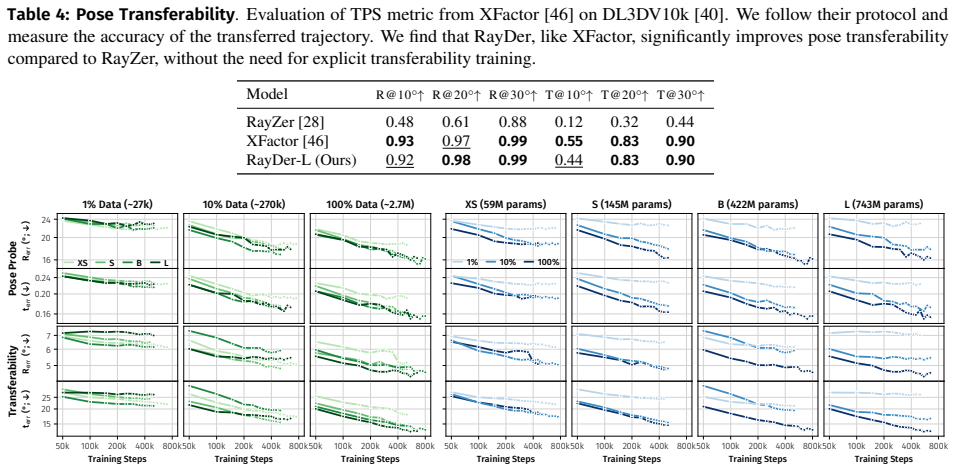
- RayDer exhibits clean power-law scaling with increasing data and compute.
- It outperforms training on static-scene data mixtures alone.
- It achieves competitive zero-shot open-set performance with supervised SOTA on multiple benchmarks.
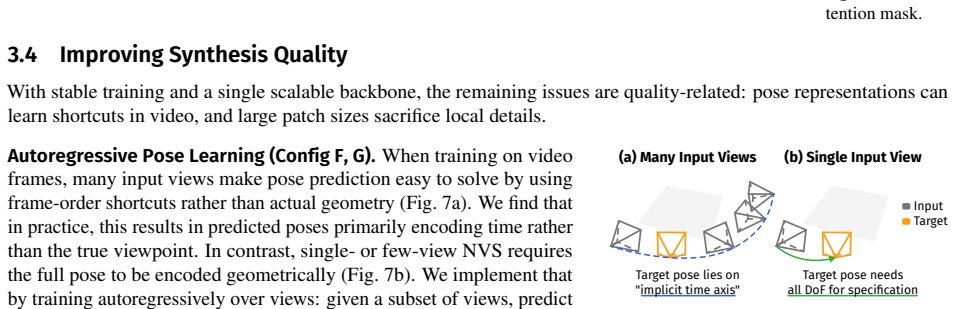
- Training on unconstrained real-world video becomes stable for static NVS.
- Self-supervised NVS becomes a well-posed single-model scaling problem.
Where Pith is reading between the lines
- If the scaling holds, larger models trained on more video could surpass current supervised methods without labels.
- The nuisance state approach might apply to other tasks where dynamics are not the focus but available in data.
- Consolidating multiple components into one model could simplify other 3D vision pipelines.
Load-bearing premise
The minimal dynamic state sufficiently absorbs time-varying content to enable stable training on real-world video without compromising the static scene NVS objective.
What would settle it
Observing that training becomes unstable or scaling breaks when the dynamic state is removed on real-world video datasets would falsify the central claim.
Figures
read the original abstract
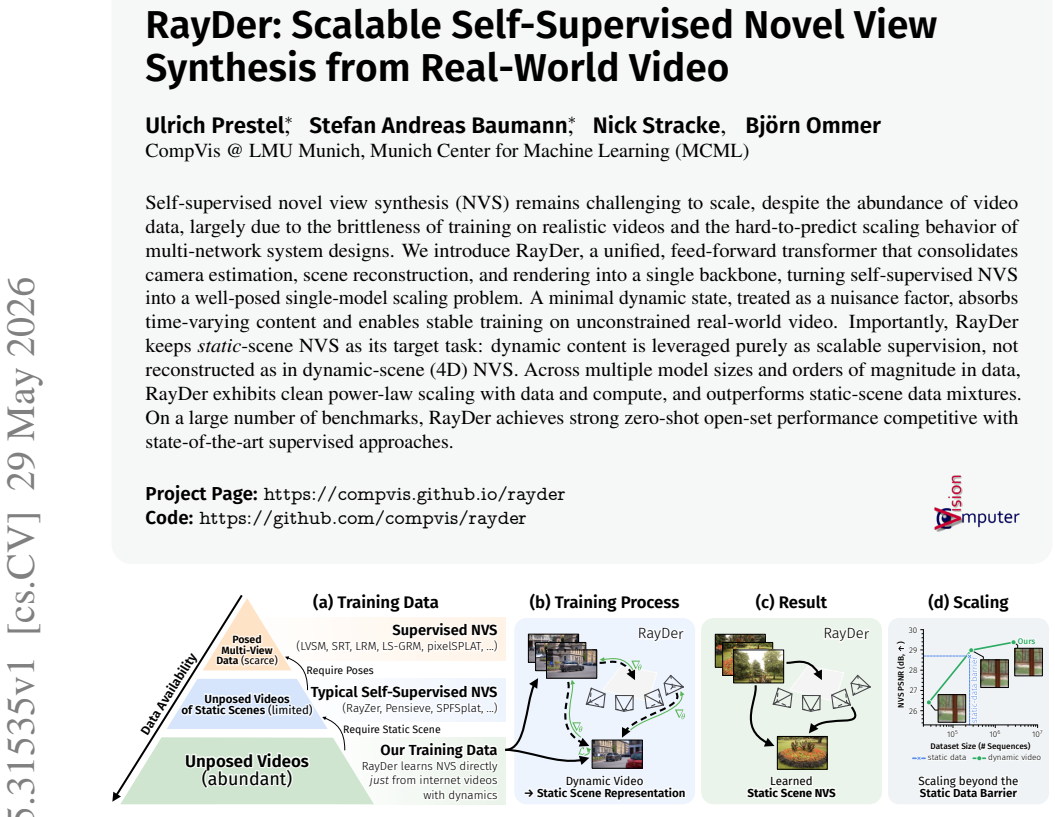
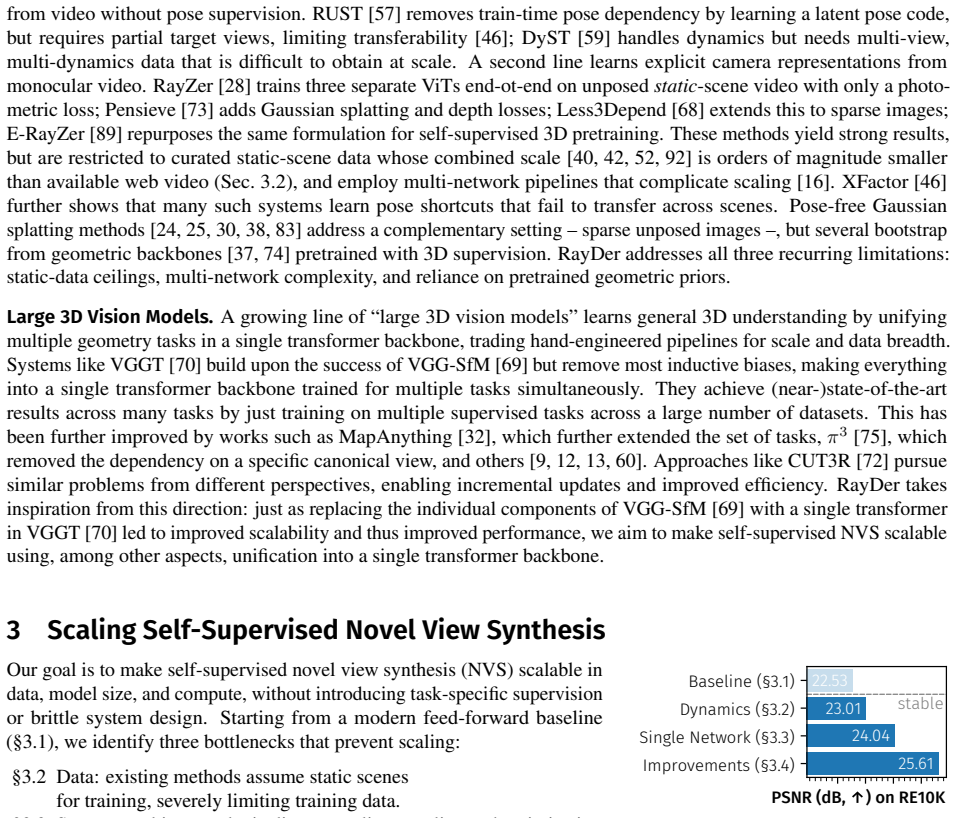
Self-supervised novel view synthesis (NVS) remains challenging to scale, despite the abundance of video data, largely due to the brittleness of training on realistic videos and the hard-to-predict scaling behavior of multi-network system designs. We introduce RayDer, a unified, feed-forward transformer that consolidates camera estimation, scene reconstruction, and rendering into a single backbone, turning self-supervised NVS into a well-posed single-model scaling problem. A minimal dynamic state, treated as a nuisance factor, absorbs time-varying content and enables stable training on unconstrained real-world video. Importantly, RayDer keeps static-scene NVS as its target task: dynamic content is leveraged purely as scalable supervision, not reconstructed as in dynamic-scene (4D) NVS. Across multiple model sizes and orders of magnitude in data, RayDer exhibits clean power-law scaling with data and compute, and outperforms static-scene data mixtures. On a large number of benchmarks, RayDer achieves strong zero-shot open-set performance competitive with state-of-the-art supervised approaches. Project Page: https://compvis.github.io/rayder
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
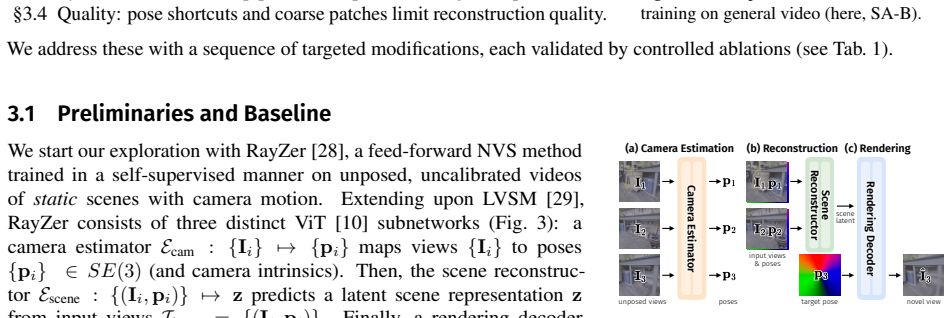
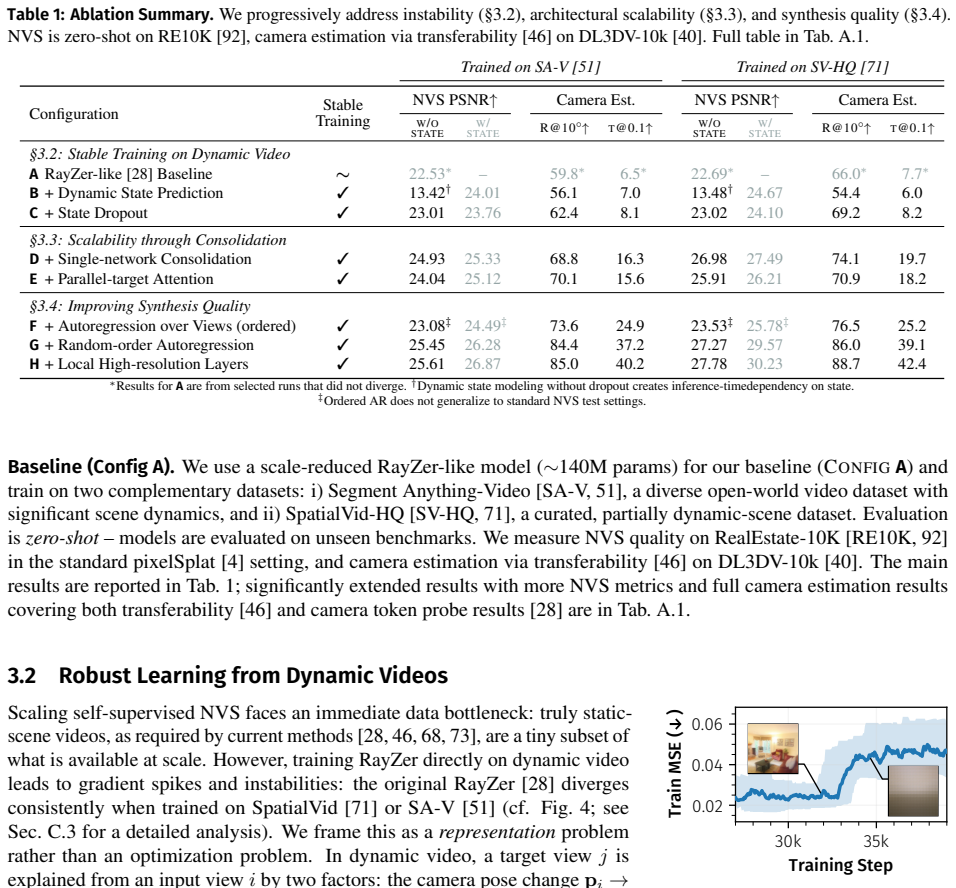
Summary. The paper introduces RayDer, a unified feed-forward transformer that consolidates camera estimation, scene reconstruction, and rendering into a single backbone for self-supervised novel view synthesis (NVS) from real-world video. A minimal dynamic state is treated as a nuisance factor to absorb time-varying content, enabling stable training while keeping the target strictly static-scene NVS (dynamics used only as scalable supervision, not reconstructed). The model exhibits clean power-law scaling with data and compute across sizes, outperforms static-scene data mixtures, and achieves strong zero-shot open-set performance competitive with supervised SOTA on multiple benchmarks.
Significance. If the scaling behavior and benchmark results hold under the stated assumptions, the work would be significant for scaling self-supervised 3D vision: it reframes NVS as a single-model empirical scaling problem rather than a brittle multi-network design, potentially allowing better leverage of abundant unlabeled video while avoiding the full complexity of 4D dynamic reconstruction.
major comments (2)
- [Abstract] Abstract: the central claim that a minimal dynamic state suffices to absorb all time-varying content (non-rigid motion, lighting variation, partial occlusions) without destabilizing static-scene NVS training or causing the backbone to allocate capacity to dynamic reconstruction is load-bearing, yet the abstract supplies no parameterization, capacity, or regularization details for this state, leaving the assumption unanchored and the stability claim unevaluable.
- [Abstract] Abstract: the assertion of 'clean power-law scaling with data and compute' across model sizes and orders of magnitude in data is presented as a key empirical result, but no quantitative details (model sizes, data volumes, fitted exponents, or goodness-of-fit metrics) are supplied, making it impossible to assess whether the scaling is genuinely parameter-free or merely consistent with prior scaling literature.
minor comments (1)
- The project page URL is a useful addition for readers seeking implementation details or visualizations.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and will revise the abstract to improve self-containment while preserving the manuscript's focus.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that a minimal dynamic state suffices to absorb all time-varying content (non-rigid motion, lighting variation, partial occlusions) without destabilizing static-scene NVS training or causing the backbone to allocate capacity to dynamic reconstruction is load-bearing, yet the abstract supplies no parameterization, capacity, or regularization details for this state, leaving the assumption unanchored and the stability claim unevaluable.
Authors: We agree the abstract would benefit from brief anchoring details. The parameterization (32-dimensional per-frame latent with explicit L2 regularization to enforce minimality and prevent capacity allocation to dynamics) is fully specified in Section 3.2 and Appendix B. We will revise the abstract to note the state as a low-capacity nuisance factor under L2 regularization, making the claim evaluable without expanding length substantially. revision: yes
-
Referee: [Abstract] Abstract: the assertion of 'clean power-law scaling with data and compute' across model sizes and orders of magnitude in data is presented as a key empirical result, but no quantitative details (model sizes, data volumes, fitted exponents, or goodness-of-fit metrics) are supplied, making it impossible to assess whether the scaling is genuinely parameter-free or merely consistent with prior scaling literature.
Authors: The quantitative details (model sizes 10M–1B parameters, data volumes up to 10^6 video hours, fitted exponents ~0.35 for data and ~0.25 for compute, R^2 > 0.95) appear in Section 4.3 and Figure 3. We acknowledge the abstract is overly terse. We will revise it to include a concise reference to the observed scaling ranges and exponents. revision: yes
Circularity Check
No circularity; empirical scaling claims with no derivation chain
full rationale
The paper presents RayDer as a unified feed-forward transformer consolidating camera estimation, reconstruction and rendering, with a minimal dynamic state treated as nuisance to enable training on real video while targeting static-scene NVS. All performance claims (zero-shot competitiveness, power-law scaling with data/compute) are stated as empirical observations across model sizes and benchmarks. No equations, uniqueness theorems, fitted parameters renamed as predictions, or self-citation load-bearing steps appear in the provided text. The design choice of the dynamic state is presented as an architectural decision rather than a derived result, and no reduction of any claim to its own inputs by construction is identifiable. The work is therefore self-contained against external benchmarks with no detectable circularity.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
[Accessed 09-11-2025]
YouTube for Press — blog.youtube.https://blog.youtube/press/. [Accessed 09-11-2025]
2025
-
[2]
Mip-nerf 360: Unbounded anti- aliased neural radiance fields
Jonathan T Barron, Ben Mildenhall, Dor Verbin, Pratul P Srinivasan, and Peter Hedman. Mip-nerf 360: Unbounded anti- aliased neural radiance fields. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 5470–5479, 2022
2022
-
[3]
ImageHash: A python perceptual image hashing module — github.com
Johannes Buchner. ImageHash: A python perceptual image hashing module — github.com. https://github.com/ JohannesBuchner/imagehash, 2025
2025
-
[4]
pixelsplat: 3d gaussian splats from image pairs for scalable generalizable 3d reconstruction
David Charatan, Sizhe Lester Li, Andrea Tagliasacchi, and Vincent Sitzmann. pixelsplat: 3d gaussian splats from image pairs for scalable generalizable 3d reconstruction. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 19457–19467, 2024
2024
-
[5]
Dbarf: Deep bundle-adjusting generalizable neural radiance fields
Yu Chen and Gim Hee Lee. Dbarf: Deep bundle-adjusting generalizable neural radiance fields. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 24–34, 2023
2023
-
[6]
Mvsplat: Efficient 3d gaussian splatting from sparse multi-view images
Yuedong Chen, Haofei Xu, Chuanxia Zheng, Bohan Zhuang, Marc Pollefeys, Andreas Geiger, Tat-Jen Cham, and Jianfei Cai. Mvsplat: Efficient 3d gaussian splatting from sparse multi-view images. InEuropean Conference on Computer Vision, pages 370–386. Springer, 2024
2024
-
[7]
Mvsplat360: Feed-forward 360 scene synthesis from sparse views.Advances in Neural Information Processing Systems, 37:107064–107086, 2024
Yuedong Chen, Chuanxia Zheng, Haofei Xu, Bohan Zhuang, Andrea Vedaldi, Tat-Jen Cham, and Jianfei Cai. Mvsplat360: Feed-forward 360 scene synthesis from sparse views.Advances in Neural Information Processing Systems, 37:107064–107086, 2024
2024
-
[8]
Scalable high-resolution pixel-space image synthesis with hourglass diffusion transformers
Katherine Crowson, Stefan Andreas Baumann, Alex Birch, Tanishq Mathew Abraham, Daniel Z Kaplan, and Enrico Shippole. Scalable high-resolution pixel-space image synthesis with hourglass diffusion transformers. InProceedings of the 41st International Conference on Machine Learning, pages 9550–9575. PMLR, 2024
2024
-
[9]
Kai Deng, Zexin Ti, Jiawei Xu, Jian Yang, and Jin Xie. Vggt-long: Chunk it, loop it, align it–pushing vggt’s limits on kilometer-scale long rgb sequences.arXiv preprint arXiv:2507.16443, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[10]
An image is worth 16x16 words: Transformers for image recognition at scale
Alexey Dosovitskiy, Lucas Beyer, Alexander Kolesnikov, Dirk Weissenborn, Xiaohua Zhai, Thomas Unterthiner, Mostafa Dehghani, Matthias Minderer, Georg Heigold, Sylvain Gelly, Jakob Uszkoreit, and Neil Houlsby. An image is worth 16x16 words: Transformers for image recognition at scale. InInternational Conference on Learning Representations, 2021
2021
-
[11]
Novel view synthesis with pixel-space diffusion models
Noam Elata, Bahjat Kawar, Yaron Ostrovsky-Berman, Miriam Farber, and Ron Sokolovsky. Novel view synthesis with pixel-space diffusion models. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 26756–26766, 2025
2025
-
[12]
IncVGGT: Incremental VGGT for memory-bounded long-range 3d reconstruction
Keyu Fang, Changchun Zhou, Yuzhe Fu, Hai Helen Li, and Yiran Chen. IncVGGT: Incremental VGGT for memory-bounded long-range 3d reconstruction. InThe Fourteenth International Conference on Learning Representations, 2026
2026
-
[13]
Quantized visual geometry grounded transformer.arXiv preprint arXiv:2509.21302, 2025
Weilun Feng, Haotong Qin, Mingqiang Wu, Chuanguang Yang, Yuqi Li, Xiangqi Li, Zhulin An, Libo Huang, Yulun Zhang, Michele Magno, et al. Quantized visual geometry grounded transformer.arXiv preprint arXiv:2509.21302, 2025
-
[14]
Colmap-free 3d gaussian splatting
Yang Fu, Sifei Liu, Amey Kulkarni, Jan Kautz, Alexei A Efros, and Xiaolong Wang. Colmap-free 3d gaussian splatting. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 20796–20805, 2024
2024
-
[15]
Monocular dynamic view synthesis: A reality check
Hang Gao, Ruilong Li, Shubham Tulsiani, Bryan Russell, and Angjoo Kanazawa. Monocular dynamic view synthesis: A reality check. InNeurIPS, 2022
2022
-
[16]
Scaling laws for neural machine translation
Behrooz Ghorbani, Orhan Firat, Markus Freitag, Ankur Bapna, Maxim Krikun, Xavier Garcia, Ciprian Chelba, and Colin Cherry. Scaling laws for neural machine translation. InInternational Conference on Learning Representations, 2022
2022
-
[17]
Neighborhood attention transformer
Ali Hassani, Steven Walton, Jiachen Li, Shen Li, and Humphrey Shi. Neighborhood attention transformer. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 6185–6194, 2023
2023
-
[18]
Scaling Laws for Autoregressive Generative Modeling
Tom Henighan, Jared Kaplan, Mor Katz, Mark Chen, Christopher Hesse, Jacob Jackson, Heewoo Jun, Tom B Brown, Prafulla Dhariwal, Scott Gray, et al. Scaling laws for autoregressive generative modeling.arXiv preprint arXiv:2010.14701, 2020
work page internal anchor Pith review Pith/arXiv arXiv 2010
-
[19]
Improving neural networks by preventing co-adaptation of feature detectors
Geoffrey E Hinton, Nitish Srivastava, Alex Krizhevsky, Ilya Sutskever, and Ruslan R Salakhutdinov. Improving neural networks by preventing co-adaptation of feature detectors.arXiv preprint arXiv:1207.0580, 2012. 13
work page internal anchor Pith review Pith/arXiv arXiv 2012
-
[20]
An empirical analysis of compute-optimal large language model training
Jordan Hoffmann, Sebastian Borgeaud, Arthur Mensch, Elena Buchatskaya, Trevor Cai, Eliza Rutherford, Diego de las Casas, Lisa Anne Hendricks, Johannes Welbl, Aidan Clark, Tom Hennigan, Eric Noland, Katherine Millican, George van den Driessche, Bogdan Damoc, Aurelia Guy, Simon Osindero, Karen Simonyan, Erich Elsen, Oriol Vinyals, Jack William Rae, and Laur...
2022
-
[21]
arXiv preprint arXiv:2410.22128 (2024)
Sunghwan Hong, Jaewoo Jung, Heeseong Shin, Jisang Han, Jiaolong Yang, Chong Luo, and Seungryong Kim. Pf3plat: Pose-free feed-forward 3d gaussian splatting.arXiv preprint arXiv:2410.22128, 2024
-
[22]
LRM: Large Reconstruction Model for Single Image to 3D
Yicong Hong, Kai Zhang, Jiuxiang Gu, Sai Bi, Yang Zhou, Difan Liu, Feng Liu, Kalyan Sunkavalli, Trung Bui, and Hao Tan. Lrm: Large reconstruction model for single image to 3d.arXiv preprint arXiv:2311.04400, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[23]
MiniCPM: Unveiling the Potential of Small Language Models with Scalable Training Strategies
Shengding Hu, Yuge Tu, Xu Han, Chaoqun He, Ganqu Cui, Xiang Long, Zhi Zheng, Yewei Fang, Yuxiang Huang, Weilin Zhao, et al. Minicpm: Unveiling the potential of small language models with scalable training strategies.arXiv preprint arXiv:2404.06395, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[24]
No pose at all: Self-supervised pose-free 3d gaussian splatting from sparse views
Ranran Huang and Krystian Mikolajczyk. No pose at all: Self-supervised pose-free 3d gaussian splatting from sparse views. arXiv preprint arXiv:2508.01171, 2025
-
[25]
Ranran Huang and Krystian Mikolajczyk. Spfsplatv2: Efficient self-supervised pose-free 3d gaussian splatting from sparse views.arXiv preprint arXiv:2509.17246, 2025
-
[26]
Arbitrary style transfer in real-time with adaptive instance normalization
Xun Huang and Serge Belongie. Arbitrary style transfer in real-time with adaptive instance normalization. InProceedings of the IEEE international conference on computer vision, pages 1501–1510, 2017
2017
-
[27]
Large scale multi-view stereopsis evaluation
Rasmus Jensen, Anders Dahl, George V ogiatzis, Engil Tola, and Henrik Aanæs. Large scale multi-view stereopsis evaluation. In2014 IEEE Conference on Computer Vision and Pattern Recognition, pages 406–413. IEEE, 2014
2014
-
[28]
Rayzer: A self-supervised large view synthesis model
Hanwen Jiang, Hao Tan, Peng Wang, Haian Jin, Yue Zhao, Sai Bi, Kai Zhang, Fujun Luan, Kalyan Sunkavalli, Qixing Huang, and Georgios Pavlakos. Rayzer: A self-supervised large view synthesis model. 2025
2025
-
[29]
Lvsm: A large view synthesis model with minimal 3d inductive bias
Haian Jin, Hanwen Jiang, Hao Tan, Kai Zhang, Sai Bi, Tianyuan Zhang, Fujun Luan, Noah Snavely, and Zexiang Xu. Lvsm: A large view synthesis model with minimal 3d inductive bias. InThe Thirteenth International Conference on Learning Representations, 2025
2025
-
[30]
Selfsplat: Pose-free and 3d prior-free generalizable 3d gaussian splatting
Gyeongjin Kang, Jisang Yoo, Jihyeon Park, Seungtae Nam, Hyeonsoo Im, Sangheon Shin, Sangpil Kim, and Eunbyung Park. Selfsplat: Pose-free and 3d prior-free generalizable 3d gaussian splatting. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 22012–22022, 2025
2025
-
[31]
Scaling Laws for Neural Language Models
Jared Kaplan, Sam McCandlish, Tom Henighan, Tom B Brown, Benjamin Chess, Rewon Child, Scott Gray, Alec Radford, Jeffrey Wu, and Dario Amodei. Scaling laws for neural language models.arXiv preprint arXiv:2001.08361, 2020
work page internal anchor Pith review Pith/arXiv arXiv 2001
-
[32]
MapAnything: Universal Feed-Forward Metric 3D Reconstruction
Nikhil Keetha, Norman Müller, Johannes Schönberger, Lorenzo Porzi, Yuchen Zhang, Tobias Fischer, Arno Knapitsch, Duncan Zauss, Ethan Weber, Nelson Antunes, et al. Mapanything: Universal feed-forward metric 3d reconstruction.arXiv preprint arXiv:2509.13414, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[33]
3d gaussian splatting for real-time radiance field rendering.ACM Trans
Bernhard Kerbl, Georgios Kopanas, Thomas Leimkühler, and George Drettakis. 3d gaussian splatting for real-time radiance field rendering.ACM Trans. Graph., 42(4):139–1, 2023
2023
-
[34]
pHash: The open source perceptual hash library.https://www.phash.org/, 2010
Evan Klinger and David Starkweather. pHash: The open source perceptual hash library.https://www.phash.org/, 2010
2010
-
[35]
Tanks and temples: Benchmarking large-scale scene reconstruction.ACM Transactions on Graphics, 36(4), 2017
Arno Knapitsch, Jaesik Park, Qian-Yi Zhou, and Vladlen Koltun. Tanks and temples: Benchmarking large-scale scene reconstruction.ACM Transactions on Graphics, 36(4), 2017
2017
-
[36]
Video autoencoder: self-supervised disentanglement of static 3d structure and motion
Zihang Lai, Sifei Liu, Alexei A Efros, and Xiaolong Wang. Video autoencoder: self-supervised disentanglement of static 3d structure and motion. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 9730–9740, 2021
2021
-
[37]
Grounding image matching in 3d with mast3r
Vincent Leroy, Yohann Cabon, and Jérôme Revaud. Grounding image matching in 3d with mast3r. InEuropean Conference on Computer Vision, pages 71–91. Springer, 2024
2024
-
[38]
Zhiqi Li, Chengrui Dong, Yiming Chen, Zhangchi Huang, and Peidong Liu. Vicasplat: A single run is all you need for 3d gaussian splatting and camera estimation from unposed video frames.arXiv preprint arXiv:2503.10286, 2025
-
[39]
Megasam: Accurate, fast and robust structure and motion from casual dynamic videos
Zhengqi Li, Richard Tucker, Forrester Cole, Qianqian Wang, Linyi Jin, Vickie Ye, Angjoo Kanazawa, Aleksander Holynski, and Noah Snavely. Megasam: Accurate, fast and robust structure and motion from casual dynamic videos. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 10486–10496, 2025. 14
2025
-
[40]
Dl3dv-10k: A large-scale scene dataset for deep learning-based 3d vision
Lu Ling, Yichen Sheng, Zhi Tu, Wentian Zhao, Cheng Xin, Kun Wan, Lantao Yu, Qianyu Guo, Zixun Yu, Yawen Lu, et al. Dl3dv-10k: A large-scale scene dataset for deep learning-based 3d vision. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 22160–22169, 2024
2024
-
[41]
Scaling Sequence-to-Sequence Generative Neural Rendering
Shikun Liu, Kam Woh Ng, Wonbong Jang, Jiadong Guo, Junlin Han, Haozhe Liu, Yiannis Douratsos, Juan C Pérez, Zijian Zhou, Chi Phung, et al. Scaling sequence-to-sequence generative neural rendering.arXiv preprint arXiv:2510.04236, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[42]
Zhang, Natalia Neverova, Andrea Vedaldi, Roman Shapovalov, and David Novotny
Xingchen Liu, Piyush Tayal, Jianyuan Wang, Jesus Zarzar, Tom Monnier, Konstantinos Tertikas, Jiali Duan, Antoine Toisoul, Jason Y . Zhang, Natalia Neverova, Andrea Vedaldi, Roman Shapovalov, and David Novotny. Uncommon objects in 3d. In arXiv, 2024
2024
-
[43]
Decoupled weight decay regularization
Ilya Loshchilov and Frank Hutter. Decoupled weight decay regularization. InInternational Conference on Learning Represen- tations, 2019
2019
-
[44]
Srinivasan, Rodrigo Ortiz-Cayon, Nima Khademi Kalantari, Ravi Ramamoorthi, Ren Ng, and Abhishek Kar
Ben Mildenhall, Pratul P. Srinivasan, Rodrigo Ortiz-Cayon, Nima Khademi Kalantari, Ravi Ramamoorthi, Ren Ng, and Abhishek Kar. Local light field fusion: Practical view synthesis with prescriptive sampling guidelines.ACM Transactions on Graphics (TOG), 2019
2019
-
[45]
Nerf: Representing scenes as neural radiance fields for view synthesis
Ben Mildenhall, Pratul P Srinivasan, Matthew Tancik, Jonathan T Barron, Ravi Ramamoorthi, and Ren Ng. Nerf: Representing scenes as neural radiance fields for view synthesis. InEuropean Conference on Computer Vision, pages 405–421. Springer, 2020
2020
-
[46]
arXiv preprint arXiv:2510.13063 (2025)
Thomas W Mitchel, Hyunwoo Ryu, and Vincent Sitzmann. True self-supervised novel view synthesis is transferable.arXiv preprint arXiv:2510.13063, 2025
-
[47]
Scaling transformer-based novel view synthesis with models token disentanglement and synthetic data
Nithin Gopalakrishnan Nair, Srinivas Kaza, Xuan Luo, Vishal M Patel, Stephen Lombardi, and Jungyeon Park. Scaling transformer-based novel view synthesis with models token disentanglement and synthetic data. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 28567–28576, 2025
2025
-
[48]
Scalable diffusion models with transformers
William Peebles and Saining Xie. Scalable diffusion models with transformers. InProceedings of the IEEE/CVF international conference on computer vision, pages 4195–4205, 2023
2023
-
[49]
A benchmark dataset and evaluation methodology for video object segmentation
Federico Perazzi, Jordi Pont-Tuset, Brian McWilliams, Luc Van Gool, Markus Gross, and Alexander Sorkine-Hornung. A benchmark dataset and evaluation methodology for video object segmentation. InProceedings of the IEEE conference on computer vision and pattern recognition, pages 724–732, 2016
2016
-
[50]
Julius Plucker. Xvii. on a new geometry of space.Philosophical Transactions of the Royal Society of London, (155):725–791, 1865
-
[51]
SAM 2: Segment Anything in Images and Videos
Nikhila Ravi, Valentin Gabeur, Yuan-Ting Hu, Ronghang Hu, Chaitanya Ryali, Tengyu Ma, Haitham Khedr, Roman Rädle, Chloe Rolland, Laura Gustafson, et al. Sam 2: Segment anything in images and videos.arXiv preprint arXiv:2408.00714, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[52]
Common objects in 3d: Large-scale learning and evaluation of real-life 3d category reconstruction
Jeremy Reizenstein, Roman Shapovalov, Philipp Henzler, Luca Sbordone, Patrick Labatut, and David Novotny. Common objects in 3d: Large-scale learning and evaluation of real-life 3d category reconstruction. InInternational Conference on Computer Vision, 2021
2021
-
[53]
Geometry-free view synthesis: Transformers and no 3d priors
Robin Rombach, Patrick Esser, and Björn Ommer. Geometry-free view synthesis: Transformers and no 3d priors. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 14356–14366, 2021
2021
-
[54]
Aleksandr Safin, Daniel Duckworth, and Mehdi S. M. Sajjadi. Repast: Relative pose attention scene representation transformer. 2023
2023
-
[55]
Object scene representation transformer.Advances in neural information processing systems, 35:9512–9524, 2022
Mehdi SM Sajjadi, Daniel Duckworth, Aravindh Mahendran, Sjoerd Van Steenkiste, Filip Pavetic, Mario Lucic, Leonidas J Guibas, Klaus Greff, and Thomas Kipf. Object scene representation transformer.Advances in neural information processing systems, 35:9512–9524, 2022
2022
-
[56]
Scene representation transformer: Geometry-free novel view synthesis through set-latent scene representations
Mehdi SM Sajjadi, Henning Meyer, Etienne Pot, Urs Bergmann, Klaus Greff, Noha Radwan, Suhani V ora, Mario Luˇci´c, Daniel Duckworth, Alexey Dosovitskiy, et al. Scene representation transformer: Geometry-free novel view synthesis through set-latent scene representations. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, p...
2022
-
[57]
Rust: Latent neural scene representations from unposed imagery
Mehdi SM Sajjadi, Aravindh Mahendran, Thomas Kipf, Etienne Pot, Daniel Duckworth, Mario Lu ˇci´c, and Klaus Greff. Rust: Latent neural scene representations from unposed imagery. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 17297–17306, 2023. 15
2023
-
[58]
Structure-from-motion revisited
Johannes Lutz Schönberger and Jan-Michael Frahm. Structure-from-motion revisited. InConference on Computer Vision and Pattern Recognition (CVPR), 2016
2016
-
[59]
Maximilian Seitzer, Sjoerd van Steenkiste, Thomas Kipf, Klaus Greff, and Mehdi S. M. Sajjadi. DyST: Towards dynamic neural scene representations on real-world videos. InThe Twelfth International Conference on Learning Representations, 2024
2024
-
[60]
FastVGGT: Training-Free Acceleration of Visual Geometry Transformer
You Shen, Zhipeng Zhang, Yansong Qu, and Liujuan Cao. Fastvggt: Training-free acceleration of visual geometry transformer. arXiv preprint arXiv:2509.02560, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[61]
Oriane Siméoni, Huy V . V o, Maximilian Seitzer, Federico Baldassarre, Maxime Oquab, Cijo Jose, Vasil Khalidov, Marc Szafraniec, Seungeun Yi, Michaël Ramamonjisoa, Francisco Massa, Daniel Haziza, Luca Wehrstedt, Jianyuan Wang, Timothée Darcet, Théo Moutakanni, Leonel Sentana, Claire Roberts, Andrea Vedaldi, Jamie Tolan, John Brandt, Camille Couprie, Julie...
2025
-
[62]
Cameron Smith, Yilun Du, Ayush Tewari, and Vincent Sitzmann. Flowcam: Training generalizable 3d radiance fields without camera poses via pixel-aligned scene flow.arXiv preprint arXiv:2306.00180, 2023
-
[63]
RoFormer: Enhanced Transformer with Rotary Position Embedding
Jianlin Su, Yu Lu, Shengfeng Pan, Bo Wen, and Yunfeng Liu. Roformer: enhanced transformer with rotary position embedding. corr abs/2104.09864 (2021).arXiv preprint arXiv:2104.09864, 2021
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[64]
Llama 2: Open foundation and fine-tuned chat models, 2023
Hugo Touvron, Louis Martin, Kevin Stone, Peter Albert, Amjad Almahairi, Yasmine Babaei, Nikolay Bashlykov, Soumya Batra, Prajjwal Bhargava, Shruti Bhosale, Dan Bikel, Lukas Blecher, Cristian Canton Ferrer, Moya Chen, Guillem Cucurull, David Esiobu, Jude Fernandes, Jeremy Fu, Wenyin Fu, Brian Fuller, Cynthia Gao, Vedanuj Goswami, Naman Goyal, Anthony Harts...
2023
-
[65]
The double sphere camera model
Vladyslav Usenko, Nikolaus Demmel, and Daniel Cremers. The double sphere camera model. In2018 International Conference on 3D Vision (3DV), pages 552–560. IEEE, 2018
2018
-
[66]
Feng Wang, Yaodong Yu, Guoyizhe Wei, Wei Shao, Yuyin Zhou, Alan Yuille, and Cihang Xie. Scaling laws in patchification: An image is worth 50,176 tokens and more.arXiv preprint arXiv:2502.03738, 2025
-
[67]
RayZer: A Self-supervised Large View Synthesis Model
Haoru Wang. Open-Rayzer: a open-source Self-Reimplemented Version of the paper "RayZer: A Self-supervised Large View Synthesis Model" — github.com.https://github.com/ou524u/Open-Rayzer, 2025
2025
-
[68]
Haoru Wang, Kai Ye, Yangyan Li, Wenzheng Chen, and Baoquan Chen. The less you depend, the more you learn: Synthesizing novel views from sparse, unposed images without any 3d knowledge.arXiv preprint arXiv:2506.09885, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[69]
Vggsfm: Visual geometry grounded deep structure from motion
Jianyuan Wang, Nikita Karaev, Christian Rupprecht, and David Novotny. Vggsfm: Visual geometry grounded deep structure from motion. 2023
2023
-
[70]
Vggt: Visual geometry grounded transformer
Jianyuan Wang, Minghao Chen, Nikita Karaev, Andrea Vedaldi, Christian Rupprecht, and David Novotny. Vggt: Visual geometry grounded transformer. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 5294–5306, 2025
2025
-
[71]
Spatialvid: A large-scale video dataset with spatial annotations
Jiahao Wang, Yufeng Yuan, Rujie Zheng, Youtian Lin, Jian Gao, Lin-Zhuo Chen, Yajie Bao, Yi Zhang, Chang Zeng, Yanxi Zhou, et al. Spatialvid: A large-scale video dataset with spatial annotations.arXiv preprint arXiv:2509.09676, 2025
-
[72]
Continuous 3d perception model with persistent state
Qianqian Wang, Yifei Zhang, Aleksander Holynski, Alexei A Efros, and Angjoo Kanazawa. Continuous 3d perception model with persistent state. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 10510–10522, 2025
2025
-
[73]
Ruoyu Wang, Yi Ma, and Shenghua Gao. Recollection from pensieve: Novel view synthesis via learning from uncalibrated videos.arXiv preprint arXiv:2505.13440, 2025
-
[74]
Dust3r: Geometric 3d vision made easy
Shuzhe Wang, Vincent Leroy, Yohann Cabon, Boris Chidlovskii, and Jerome Revaud. Dust3r: Geometric 3d vision made easy. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 20697–20709, 2024
2024
-
[75]
Yifan Wang, Jianjun Zhou, Haoyi Zhu, Wenzheng Chang, Yang Zhou, Zizun Li, Junyi Chen, Jiangmiao Pang, Chunhua Shen, and Tong He.π 3: Scalable permutation-equivariant visual geometry learning.arXiv preprint arXiv:2507.13347, 2025. 16
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[76]
Image quality assessment: from error visibility to structural similarity.IEEE transactions on image processing, 13(4):600–612, 2004
Zhou Wang, Alan C Bovik, Hamid R Sheikh, and Eero P Simoncelli. Image quality assessment: from error visibility to structural similarity.IEEE transactions on image processing, 13(4):600–612, 2004
2004
-
[77]
Novel view synthesis with diffusion models,
Daniel Watson, William Chan, Ricardo Martin-Brualla, Jonathan Ho, Andrea Tagliasacchi, and Mohammad Norouzi. Novel view synthesis with diffusion models.arXiv preprint arXiv:2210.04628, 2022
-
[78]
Controlling space and time with diffusion models.arXiv preprint arXiv:2407.07860, 2024
Daniel Watson, Saurabh Saxena, Lala Li, Andrea Tagliasacchi, and David J Fleet. Controlling space and time with diffusion models.arXiv preprint arXiv:2407.07860, 2024
-
[79]
Reconfusion: 3d reconstruction with diffusion priors
Rundi Wu, Ben Mildenhall, Philipp Henzler, Keunhong Park, Ruiqi Gao, Daniel Watson, Pratul P Srinivasan, Dor Verbin, Jonathan T Barron, Ben Poole, et al. Reconfusion: 3d reconstruction with diffusion priors. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 21551–21561, 2024
2024
-
[80]
Cat4d: Create anything in 4d with multi-view video diffusion models
Rundi Wu, Ruiqi Gao, Ben Poole, Alex Trevithick, Changxi Zheng, Jonathan T Barron, and Aleksander Holynski. Cat4d: Create anything in 4d with multi-view video diffusion models. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 26057–26068, 2025
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.