Improving path-tracking performance of an articulated tractor-trailer system using a non-linear kinematic model
Pith reviewed 2026-07-01 04:59 UTC · model grok-4.3
The pith
A non-linear kinematic model of the trailer allows a predictive controller to track its position directly and reduce deviation on both straight paths and headland turns.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
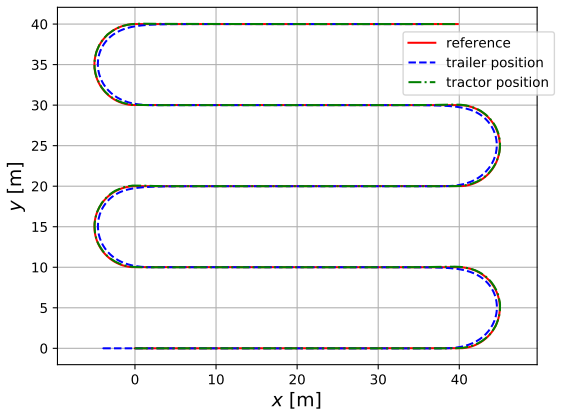
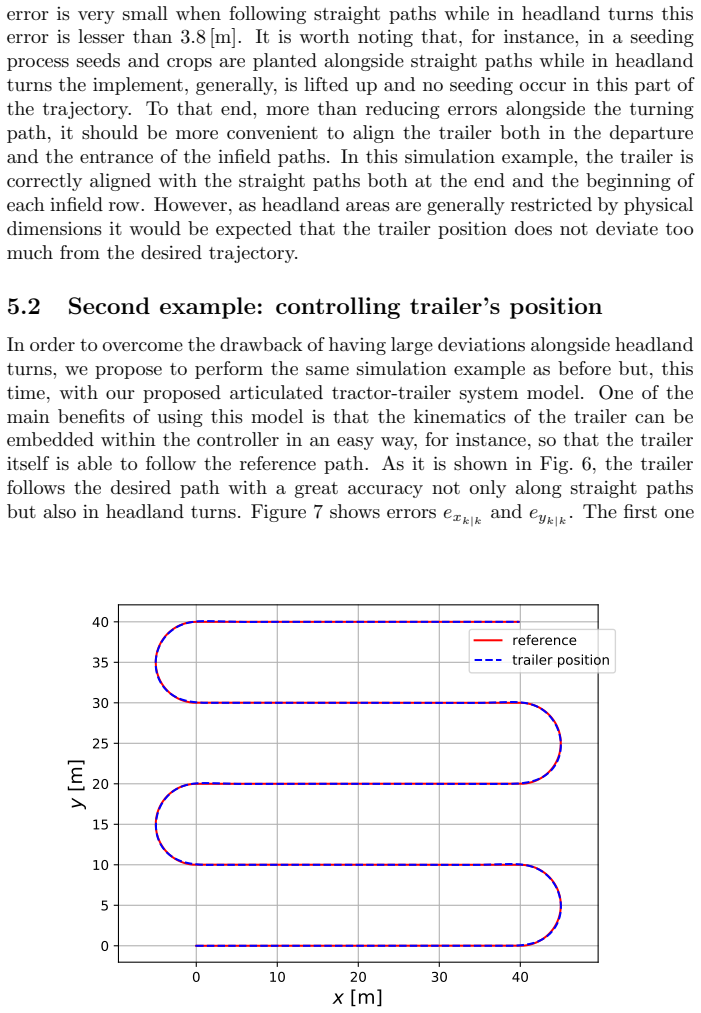
The paper claims that a novel non-linear kinematic model of an articulated tractor-trailer system, when combined with receding-horizon control, enables direct monitoring and control of the trailer's position, producing substantial reductions in its deviation from the reference path on straight lines as well as headland turns, as shown in Gazebo simulations with the Robot Operating System.
What carries the argument
The non-linear kinematic model of the articulated tractor-trailer system, which captures dual steering and is embedded inside the non-linear model predictive controller to act on the trailer position.
If this is right
- The controller can target and reduce errors in the trailer's own position rather than the tractor's.
- Position deviation decreases on straight paths when trailer kinematics are included.
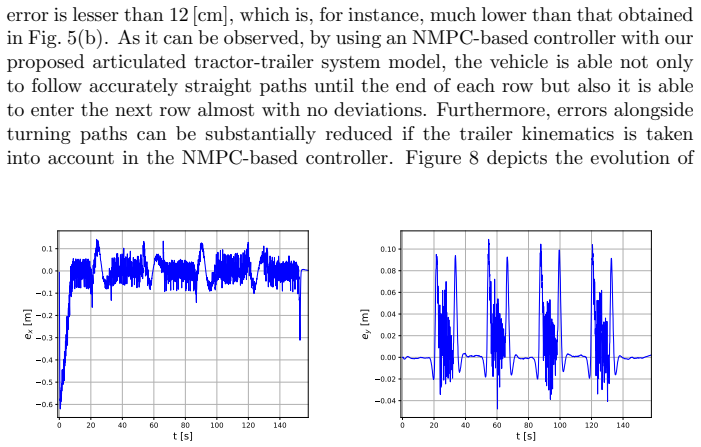
- Position deviation also decreases during headland turns when trailer kinematics are included.
- The method supports path-tracking tasks for dual-steering vehicles in precision agriculture.
Where Pith is reading between the lines
- Physical hardware tests would be needed to check performance under real slip and delay conditions absent from simulation.
- The same modeling approach could be adapted to other articulated vehicles used in logistics or construction.
- Adding real-time sensor feedback to the model might increase robustness beyond the current simulation results.
Load-bearing premise
The non-linear kinematic model is accurate for the physical articulated system and the Gazebo simulations capture the main dynamics without significant missing effects such as slip or actuator delays.
What would settle it
Run the identical path-tracking experiments on a physical tractor-trailer and measure whether adding the trailer kinematics to the controller still produces a substantial reduction in trailer position deviation.
Figures
read the original abstract
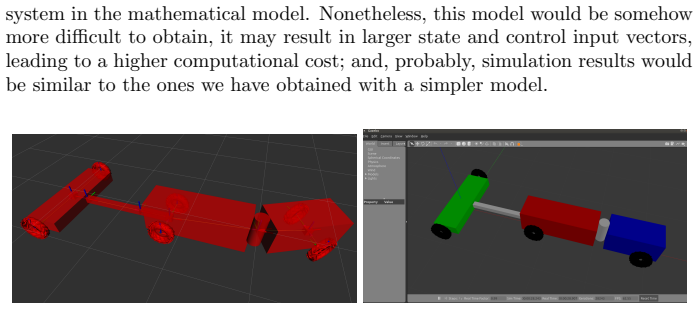
This paper presents a novel non-linear mathematical model of an articulated tractor-trailer system that can be used, in combination with receding horizon techniques, to improve the performance of path tracking tasks of articulated systems. Due to its dual steering mechanisms, this type of vehicle can be very useful in precision agriculture, particularly for seeding, spraying and harvesting in small fields. The articulated tractor-trailer system model was embedded within a non-linear model predictive controller and the trailer position was monitored. When the kinematic of the trailer was considered, the deviation of trailer's position was reduced substantially alongside not only straight paths but also in headland turns. Using the proposed mathematical model, we were able to control the trailer's position itself rather than the tractor's position. The Robot Operating System (ROS) framework and Gazebo simulator were used to perform realistic simulations examples.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a novel non-linear kinematic model of an articulated tractor-trailer system, embeds it in a nonlinear model predictive controller (NMPC), and evaluates path-tracking performance via ROS/Gazebo simulations. It claims that explicitly accounting for trailer kinematics allows direct control of trailer position (rather than tractor position only) and yields substantially reduced trailer deviation on both straight paths and headland turns.
Significance. If the reported simulation improvements hold under real-world conditions, the work could support more precise control of articulated vehicles in agriculture. The explicit use of a non-linear model inside NMPC and the ROS/Gazebo simulation framework constitute reproducible elements that future studies could build upon.
major comments (2)
- [Abstract] Abstract: the central claim that trailer deviation 'was reduced substantially' supplies no quantitative metrics, baseline controller comparisons, error statistics, or number of trials. Without these data the magnitude and reliability of the reported improvement cannot be assessed.
- [Simulation results] Simulation results: all quantitative evidence is obtained from Gazebo; no hardware experiments or model-validation data against a physical tractor-trailer are presented. The claim that the approach improves performance of the physical system therefore rests on the untested assumption that Gazebo reproduces the relevant kinematics without unmodeled effects such as wheel slip or actuator delay.
minor comments (1)
- [Abstract] Abstract: the phrase 'realistic simulations examples' is grammatically awkward and should be clarified.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We respond to each major comment below, indicating planned revisions where feasible.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that trailer deviation 'was reduced substantially' supplies no quantitative metrics, baseline controller comparisons, error statistics, or number of trials. Without these data the magnitude and reliability of the reported improvement cannot be assessed.
Authors: We agree that the abstract should provide quantitative details to support the claim. The body of the manuscript contains simulation results with error statistics, baseline comparisons (tractor-only vs. trailer-aware NMPC), and multiple trials, but these are not summarized in the abstract. We will revise the abstract to include specific metrics such as the observed reductions in trailer path deviation (with values and units), baseline comparisons, error statistics (e.g., mean and standard deviation), and the number of simulation trials. revision: yes
-
Referee: [Simulation results] Simulation results: all quantitative evidence is obtained from Gazebo; no hardware experiments or model-validation data against a physical tractor-trailer are presented. The claim that the approach improves performance of the physical system therefore rests on the untested assumption that Gazebo reproduces the relevant kinematics without unmodeled effects such as wheel slip or actuator delay.
Authors: The work is explicitly a simulation study using ROS and Gazebo, as stated in the manuscript. We will revise the text to emphasize that performance gains are demonstrated in simulation only and to add a limitations discussion addressing Gazebo assumptions, including potential unmodeled effects such as wheel slip and actuator delay. No hardware experiments are available for this study. revision: partial
- The absence of hardware experiments or physical model-validation data against a real tractor-trailer system.
Circularity Check
No significant circularity; kinematic derivation is self-contained
full rationale
The paper derives its non-linear kinematic model directly from geometric and velocity constraints of the articulated tractor-trailer (standard non-holonomic kinematics extended to the trailer). This model is then inserted into an NMPC formulation and evaluated in independent Gazebo/ROS simulations. No equations reduce to fitted parameters renamed as predictions, no self-citations are invoked as load-bearing uniqueness theorems, and no ansatz is smuggled via prior work. The derivation chain is therefore independent of its own outputs and does not exhibit any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Improving path-tracking performance of an articulated tractor-trailer system using a non-linear kinematic model Marina Murillo 1, Guido Sanchez 1, Nestor Deniz 1, Lucas Genzelis 1, and Leonardo Giovanini 1 1Research Institute for Signals, Systems and Computational Intelligence, sinc(i), FICH-UNL/CONICET, Ciudad Universitaria UNL, 4 ◦ piso FICH, (S3000) Sa...
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[2]
propose a system and method for controlling an implement towed to an agricultural vehicle. Here, an actuator is mounted between the rear part of the chassis and the implement’s hitch-point, thus al- lowing to move the whole implement in a parallelogram-wise manner in a lateral direction. As the controller proposed in this work is based on PID algorithm, i...
2017
-
[3]
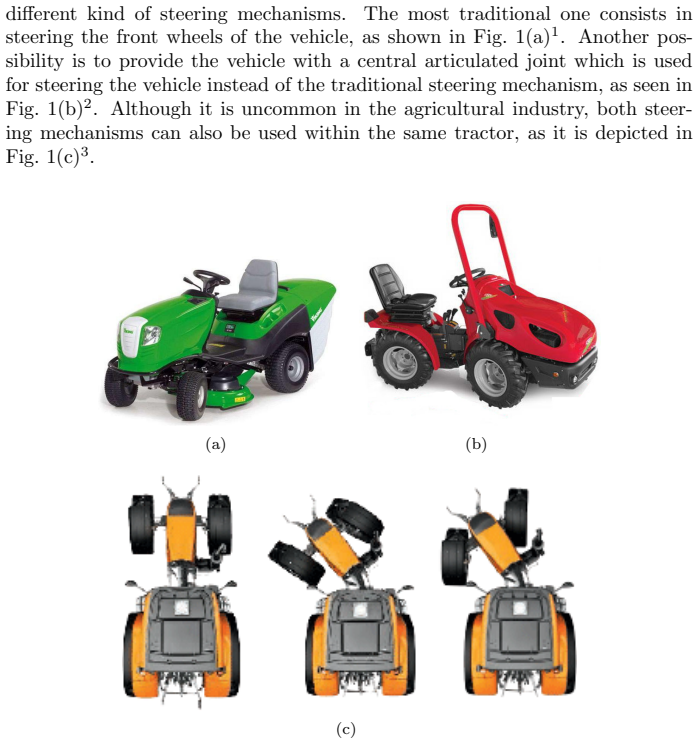
On the other hand, tractors can change their orientation by means of two 2 different kind of steering mechanisms
combine a fast centralized NMPC method based on ACADO code generation tool [Houska et al., 2011], with nonlinear moving horizon estimation (NMHE) to obtain accurate trajectory tracking of an autonomous tractor-trailer system under unknown and variable soil conditions. On the other hand, tractors can change their orientation by means of two 2 different kin...
2011
-
[4]
Although it is uncommon in the agricultural industry, both steer- ing mechanisms can also be used within the same tractor, as it is depicted in Fig. 1(c)3. (a) (b) (c) Figure 1: Different turning mechanisms. Since the performance of MPC-based controllers highly depends on the model describing the system behavior, a precise mathematical model is essen- tia...
2019
-
[5]
bicycle model
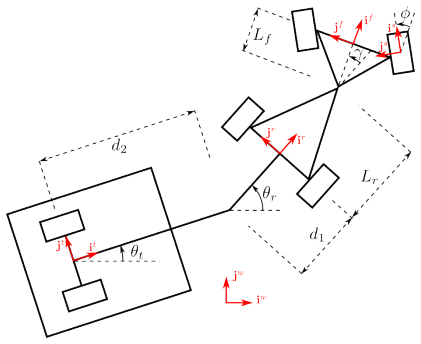
Consequently, the model is further simplified treating the system as if each axle had a single wheel located on its center. This simplification is commonly referred to as “bicycle model” and it is commonplace in the modeling of ground vehicles [Zhang and Wei, 2017, LaValle, 2006, Corke and Ridley, 2001, Siew et al., 2009]. Using this simplification, we al...
2017
-
[6]
Nonlinear Model Predictive Control Tools for CasADi
and the articulation joint is removed (settingγ≡ω 1 ≡0), the model obtained matches the one presented by LaValle [2006]. 3 Non Linear Model Predictive Control In order to show the advantages of using the mathematical model of the artic- ulated tractor-trailer system described by Eq. (13), we propose to use a model based control technique such as NMPC due ...
2006
-
[7]
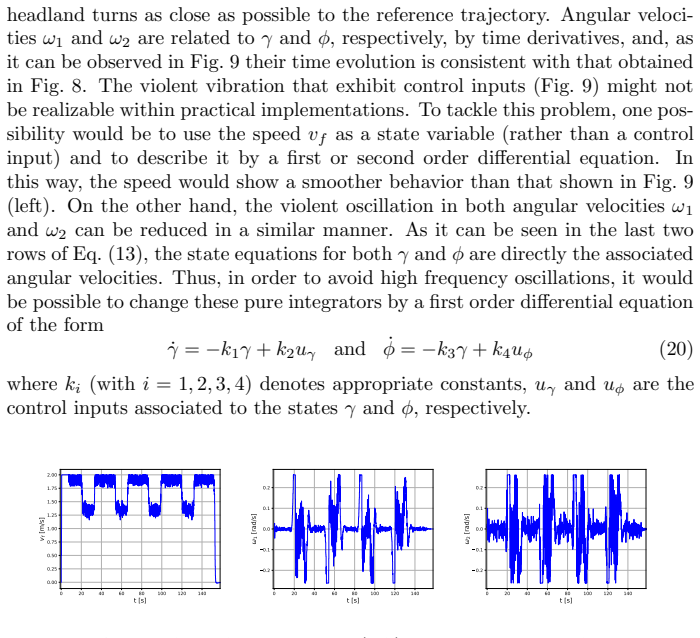
might not be realizable within practical implementations. To tackle this problem, one pos- sibility would be to use the speedv f as a state variable (rather than a control input) and to describe it by a first or second order differential equation. In this way, the speed would show a smoother behavior than that shown in Fig. 9 (left). On the other hand, th...
2016
-
[8]
Erkan Kayacan, Erdal Kayacan, Herman Ramon, and Wouter Saeys
Accessed: 2021-09-14. Erkan Kayacan, Erdal Kayacan, Herman Ramon, and Wouter Saeys. Learning in centralized nonlinear model predictive control: Application to an autonomous tractor-trailer system.IEEE Transactions on Control Systems Technology, 23 (1):197–205,
2021
-
[10]
Guido S´ anchez, Marina Murillo, Lucas Genzelis, Nahuel Deniz, and Leonardo Giovanini
Accessed: 2021-08-31. Guido S´ anchez, Marina Murillo, Lucas Genzelis, Nahuel Deniz, and Leonardo Giovanini. Mpc for nonlinear systems: A comparative review of discretiza- tion methods. InInformation Processing and Control (RPIC), 2017 XVII Workshop on, pages 1–6. IEEE,
2021
-
[11]
doi: https://doi.org/10.1016/j.compag
ISSN 0168-1699. doi: https://doi.org/10.1016/j.compag. 2006.06.001. URLhttps://www.sciencedirect.com/science/article/ pii/S016816990600069X. Luqi Tang, Fuwu Yan, Bin Zou, Kewei Wang, and Chen Lv. An Improved Kine- matic Model Predictive Control for High-Speed Path Tracking of Autonomous Vehicles.IEEE Access, 8:51400–51413,
-
[12]
doi: 10.1109/ACCESS.2020. 2980188. R Werner, S Mueller, and G Kormann. Path tracking control of tractors and steerable implements based on kinematic and dynamic modeling. In11th international conference on precision agriculture, pages 15–18. Indianapolis,
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.