MPC for nonlinear systems: a comparative review of discretization methods
Pith reviewed 2026-06-27 23:56 UTC · model grok-4.3
The pith
Three discretization methods for nonlinear MPC are compared on characteristics and simulation performance.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
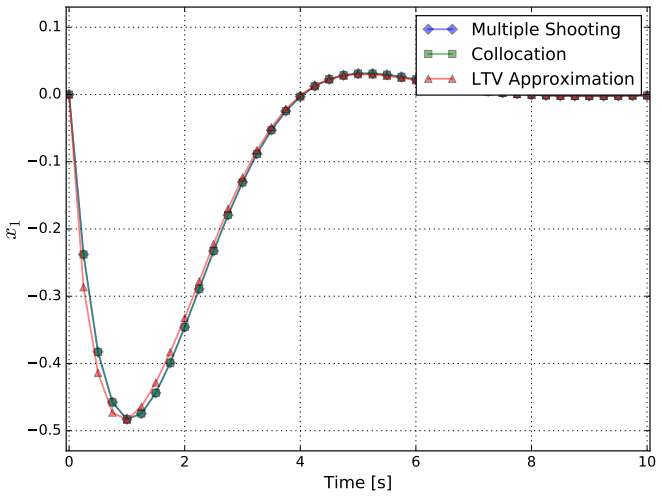
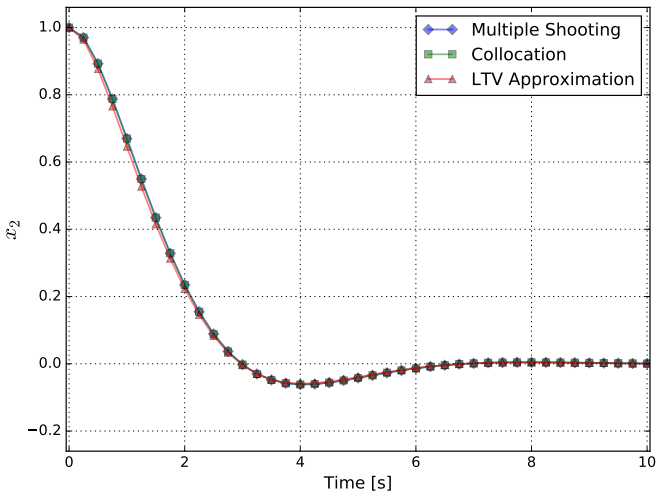
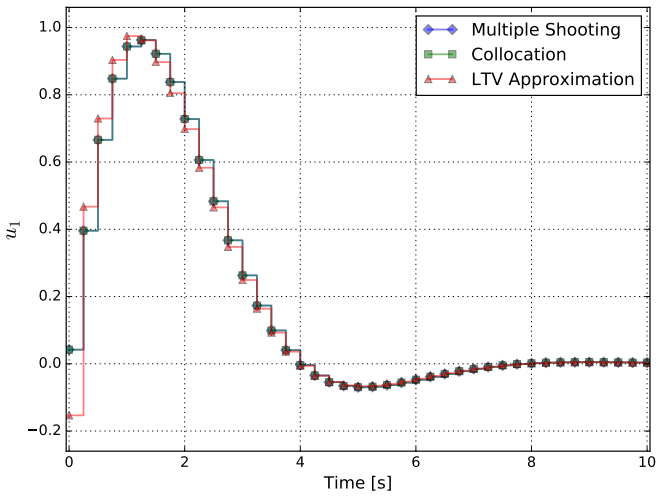
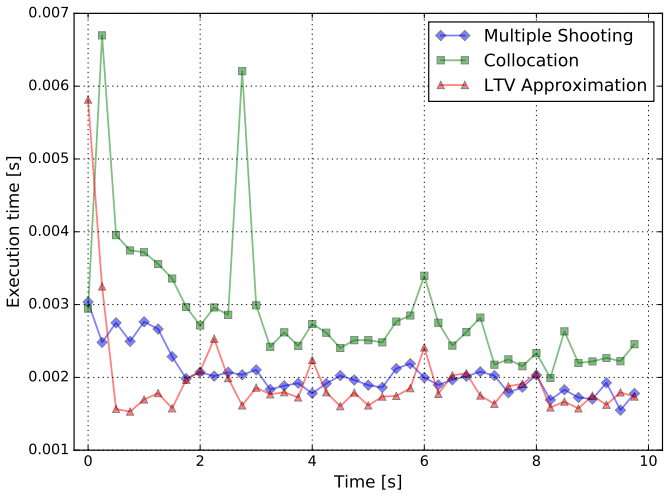
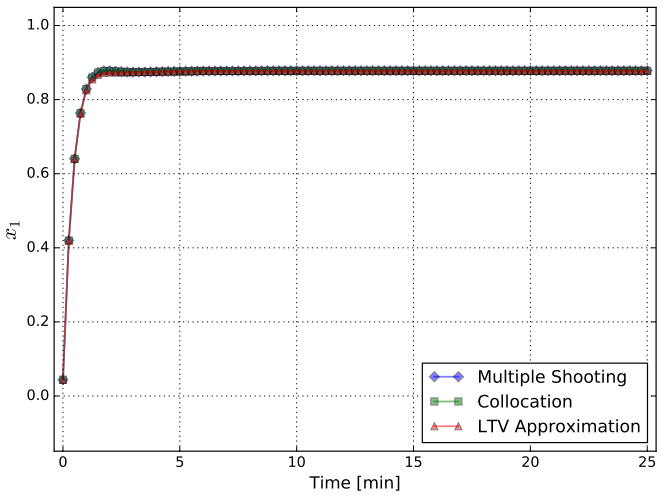
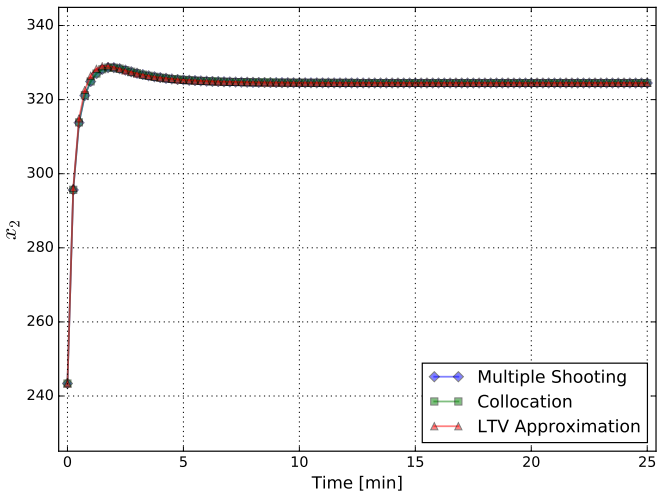
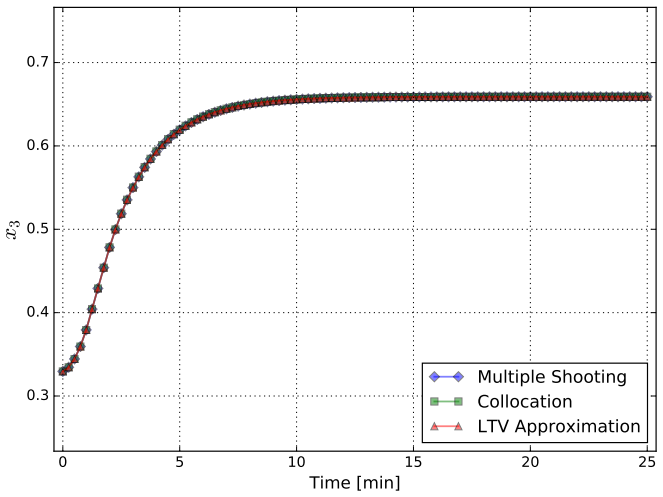
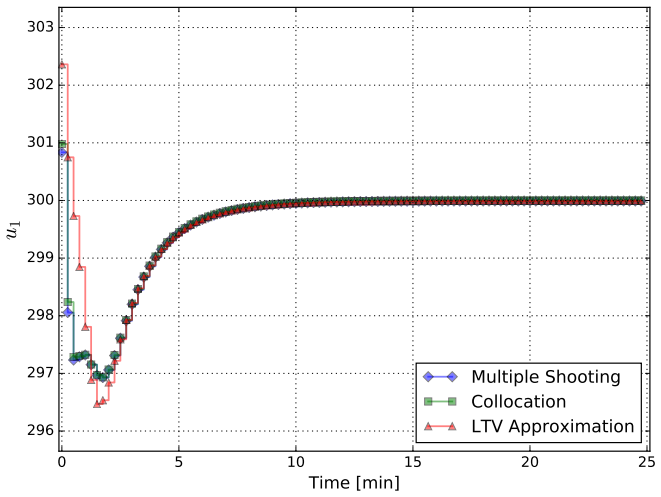
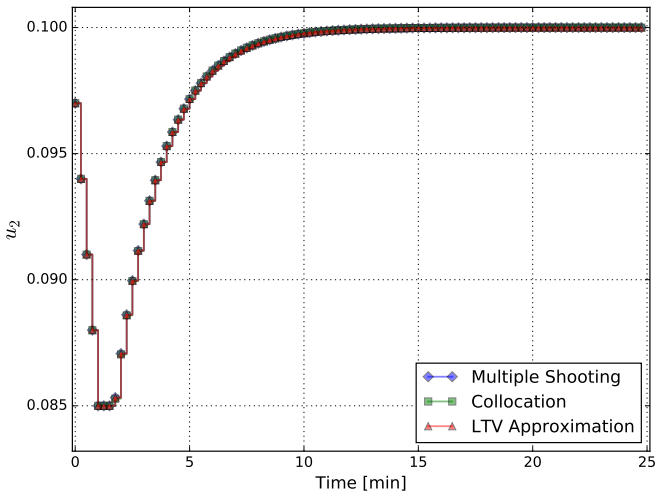
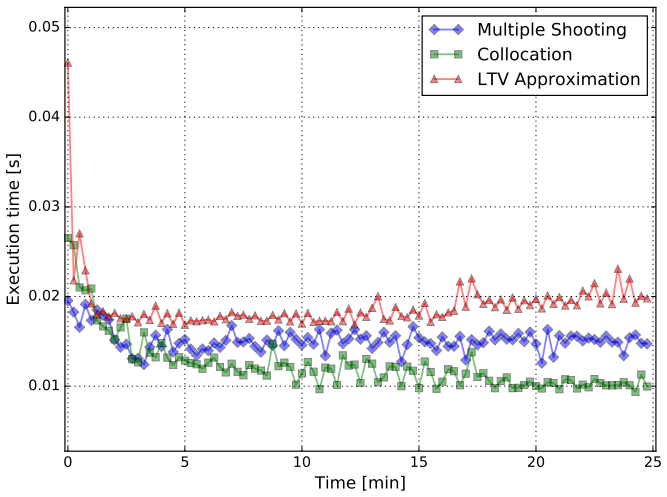
The paper establishes that an overview of the characteristics of direct multiple shooting, direct collocation, and successive linearizations can be given, and that their performance differences can be evaluated by simulating their application to two test cases involving nonlinear model predictive control.
What carries the argument
The three discretization methods—direct multiple shooting, direct collocation, and successive linearizations—for converting continuous-time nonlinear equations into forms usable by MPC solvers.
If this is right
- Engineers can select among the three methods according to the accuracy and speed observed in the test cases.
- Direct multiple shooting tends to preserve more of the original nonlinear structure during optimization.
- Successive linearizations reduce computational load at the cost of approximation error.
- Direct collocation embeds the dynamics constraints at chosen points, affecting both feasibility and solver effort.
Where Pith is reading between the lines
- The comparison could be extended by measuring real-time feasibility on embedded hardware rather than simulation alone.
- Hybrid schemes that switch between the three methods depending on operating region might combine their advantages.
- The results suggest that benchmark suites with more varied nonlinearity and constraint types would strengthen future reviews.
Load-bearing premise
The two chosen test cases are representative enough of typical nonlinear MPC problems that performance differences will generalize.
What would settle it
Repeating the simulations on a third nonlinear system with qualitatively different dynamics and observing a reversal in the performance ranking of the three methods would undermine the general conclusions.
Figures
read the original abstract
This work provides a comparative review of three different numerical methods generally used to discretize continuous-time non-linear equations appearing in model predictive control problems: direct multiple shooting, direct collocation and successive linearizations. An overview of the characteristics of each method is given and the performance of each method is evaluated through the simulation of two test cases.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper provides a comparative review of three discretization methods for continuous-time nonlinear systems in model predictive control—direct multiple shooting, direct collocation, and successive linearizations—by first outlining the characteristics of each method and then evaluating their performance through numerical simulations on two test cases.
Significance. If the simulation comparisons are conducted fairly and the test cases prove representative, the work could offer practical guidance to MPC practitioners on method selection. The direct simulation-based evaluation is a standard and potentially useful approach in the field, though the narrow scope limits broader impact.
major comments (1)
- [Abstract and simulation/results section] The central performance comparison rests on simulations of only two test cases (as stated in the abstract and detailed in the simulation/results section). No argument or additional evidence is provided that these cases span key variations in nonlinear MPC problems such as state dimension, degree of nonlinearity, stiffness, or constraint structure; therefore any observed rankings rest on an untested sampling assumption and do not support generalizable conclusions.
Simulated Author's Rebuttal
We thank the referee for the detailed review and constructive feedback. We address the single major comment below.
read point-by-point responses
-
Referee: [Abstract and simulation/results section] The central performance comparison rests on simulations of only two test cases (as stated in the abstract and detailed in the simulation/results section). No argument or additional evidence is provided that these cases span key variations in nonlinear MPC problems such as state dimension, degree of nonlinearity, stiffness, or constraint structure; therefore any observed rankings rest on an untested sampling assumption and do not support generalizable conclusions.
Authors: We agree that the manuscript presents performance comparisons based solely on two test cases without providing explicit arguments or evidence that these cases are representative across dimensions such as state dimension, degree of nonlinearity, stiffness, or constraint structure. The cases were chosen as standard benchmarks from the MPC literature to demonstrate the methods, but this does not constitute a comprehensive sampling. In a revised version we will modify the abstract, introduction, and conclusions to clearly frame the results as illustrative examples rather than generalizable rankings, and we will add an explicit discussion of the scope limitations with respect to the variations mentioned by the referee. revision: yes
Circularity Check
No circularity in derivation or evaluation chain
full rationale
The paper is a comparative review of three standard discretization methods for nonlinear MPC. It provides overviews of method characteristics and evaluates relative performance via direct simulation on two explicit test cases. No derivations, parameter fits presented as predictions, self-citations used as load-bearing premises, or ansatzes smuggled via prior work are present. The evaluation rests on external simulation benchmarks rather than reducing to the paper's own inputs by construction, satisfying the self-contained criterion for a score of 0.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
A survey of numerical methods for optimal control
Anil Rao. “A survey of numerical methods for optimal control”. In:Ad- vances in the Astronautical Sciences135.1 (2009), pp. 497–528.issn: 1569- 3953.doi:10.1515/jnum-2014-0003
-
[2]
Fast direct multiple shooting algorithms for optimal robot control
Moritz Diehl et al. “Fast direct multiple shooting algorithms for optimal robot control”. In:Fast motions in biomechanics and robotics. Springer, 2006, pp. 65–93
2006
-
[3]
Springer, 2011
Christian Kirches.Fast numerical methods for mixed-integer nonlinear model-predictive control. Springer, 2011
2011
-
[4]
A multiple shooting algorithm for direct solution of optimal control problems
Hans Bock and Karl-Josef Plitt. “A multiple shooting algorithm for direct solution of optimal control problems”. In: Proceedings of the IFAC World Congress. 1984
1984
-
[5]
Multiple shooting method for two-point boundary value problems
David Morrison, James Riley, and John Zancanaro. “Multiple shooting method for two-point boundary value problems”. In:Communications of the ACM5.12 (1962), pp. 613–614
1962
-
[6]
A collocation method for two-point boundary value problems
John Ahlberg and T Ito. “A collocation method for two-point boundary value problems”. In:Mathematics of Computation29.131 (1975), pp. 761– 776
1975
-
[7]
Survey of direct transcription for low-thrust space trajectory optimization with applications
F Topputo and C Zhang. “Survey of direct transcription for low-thrust space trajectory optimization with applications”. In:Abstract and Applied Analysis. Vol. 2014. Hindawi Publishing Corporation. 2014. 18
2014
-
[8]
Marina Murillo et al. “Generalized nonlinear optimal predictive control using iterative state-space trajectories: Applications to autonomous flight of UAVs”. In:International Journal of Control, Automation and Systems 13.2 (2015), pp. 361–370.issn: 2005-4092.doi:10.1007/s12555- 013- 0416-y
-
[9]
Iterated non-linear model predictive control based on tubes and contractive constraints
M. Murillo, G. S´ anchez, and L. Giovanini. “Iterated non-linear model predictive control based on tubes and contractive constraints”. In:ISA Transactions62 (2016), pp. 120–128.issn: 0019-0578.doi:https : / / doi.org/10.1016/j.isatra.2016.01.008
-
[10]
Pearson education, 2002
Jan Maciejowski.Predictive control: with constraints. Pearson education, 2002
2002
-
[11]
Efficient numerical methods for nonlinear MPC and moving horizon estimation
Moritz Diehl, Hans Ferreau, and Niels Haverbeke. “Efficient numerical methods for nonlinear MPC and moving horizon estimation”. In:Non- linear Model Predictive Control: Towards New Challenging Applications. Ed. by Lalo Magni, Davide Martino Raimondo, and Frank Allg¨ ower. Vol. 384. Berlin, Heidelberg: Springer Berlin Heidelberg, 2009. Chap. Ef- ficient, p...
-
[12]
Prentice-Hall, Inc., 1989
Raymond DeCarlo.Linear systems: A state variable approach with nu- merical implementation. Prentice-Hall, Inc., 1989
1989
-
[13]
Nob Hill Publishing, LLC, 2009, p
James Rawlings and David Mayne.Model predictive control: Theory and Design. Nob Hill Publishing, LLC, 2009, p. 669.isbn: 978-0-9759377-0-9
2009
-
[14]
A General-Purpose Software Framework for Dynamic Optimization
Joel Andersson. “A General-Purpose Software Framework for Dynamic Optimization”. PhD thesis. Department of Electrical Engineering (ESAT/SCD) and Optimization in Engineering Center, Kasteelpark Arenberg 10, 3001- Heverlee, Belgium: Arenberg Doctoral School, KU Leuven, Oct. 2013
2013
-
[15]
Risbeck and J
M. Risbeck and J. Rawlings.MPCTools: Nonlinear model predictive con- trol tools for CasADi (Python interface).https : / / bitbucket . org / rawlings-group/mpc-tools-casadi. 2015. 19
2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.