REVIEW 3 major objections 2 minor 1 cited by
GSCompleter completes 3D Gaussian Splatting scenes from sparse views by generating and registering metric-scale Gaussians instead of using distillation.
Reviewed by Pith at T0; open to challenge. T0 means a machine referee read the full paper against a public rubric. the ladder, T0–T4 →
T0 review · grok-4.3
2026-05-21 00:31 UTC pith:H2VWPK4D
load-bearing objection GSCompleter pushes a generate-then-register workflow for 3DGS completion that avoids distillation loops and claims faster SOTA results, but the metric-scale lifting step needs concrete checks against depth errors in the generated views. the 3 major comments →
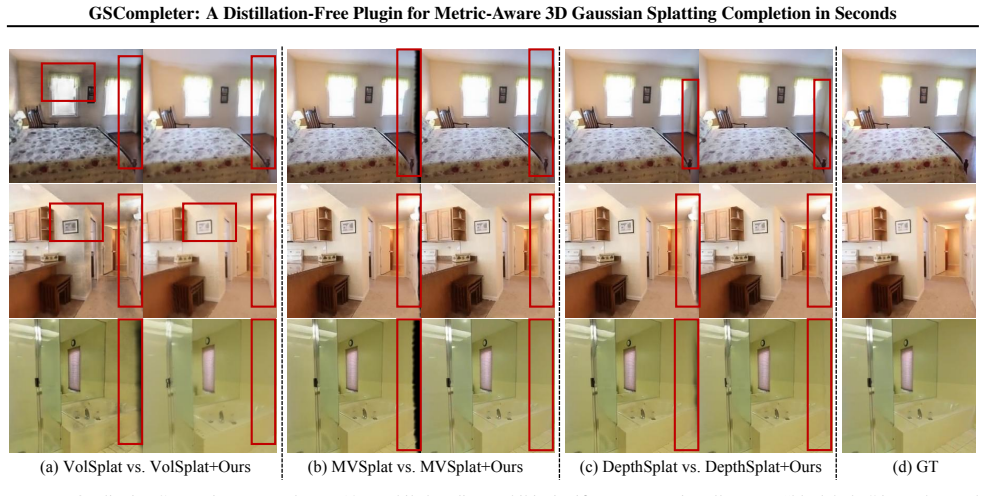
GSCompleter: A Distillation-Free Plugin for Metric-Aware 3D Gaussian Splatting Completion in Seconds
The pith
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By replacing unstable distillation with rapid geometric registration, GSCompleter exhibits superior 3DGS completion performance across three benchmarks, enhancing both quality and efficiency over various baselines and achieving new state-of-the-art results. The method synthesizes visually plausible 2D reference images and explicitly lifts them into 3D Gaussian primitives with a consistent metric scale via a robust Stereo-Anchor View Selection mechanism before integrating them using Ray-Constrained Registration.
What carries the argument
The Ray-Constrained Registration strategy, which integrates newly generated 3D Gaussian primitives into the global scene while enforcing geometric consistency through ray constraints.
Load-bearing premise
Synthesized 2D reference images can be lifted into 3D Gaussian primitives with consistent metric scale and then integrated via ray-constrained registration without introducing geometric inconsistencies or visual artifacts in the global scene.
What would settle it
If rendering the completed scene from viewpoints outside the original sparse set and the synthesized references reveals persistent floaters or scale inconsistencies, the effectiveness of the registration strategy would be disproven.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes GSCompleter, a distillation-free plugin for 3D Gaussian Splatting (3DGS) scene completion. It replaces the iterative 'Repair-then-Distill' paradigm with a 'Generate-then-Register' workflow: synthesizing 2D reference images, lifting them to metric-scale 3D Gaussian primitives via Stereo-Anchor View Selection, and integrating them into the existing scene using Ray-Constrained Registration. The method claims superior quality and efficiency over baselines, achieving new SOTA results on three benchmarks.
Significance. If the geometric consistency claims hold, GSCompleter could offer a practical efficiency gain for 3DGS completion by avoiding unstable optimization loops, with potential benefits for sparse-view reconstruction tasks. The explicit registration approach may scale better than distillation methods, though its impact depends on validation of the metric-scale lifting step.
major comments (3)
- [Stereo-Anchor View Selection mechanism] The central performance claims rest on the assumption that Stereo-Anchor View Selection produces 3D Gaussians with metric scale exactly matching the input scene. The manuscript should include quantitative validation (e.g., scale-error metrics or ablation on depth estimation accuracy from synthesized images) in the section describing this mechanism, as depth ambiguities in generative 2D synthesis could propagate to floaters or inconsistencies after Ray-Constrained Registration.
- [Ray-Constrained Registration strategy] Ray-Constrained Registration is presented as the integration step that avoids geometric artifacts. The paper needs to report specific metrics (e.g., PSNR/SSIM differences with and without the ray constraint, or failure cases on regions with high depth variance) to substantiate that it corrects rather than masks underlying scale or distortion errors from the lifting stage.
- [Experimental results] The abstract and results sections assert SOTA performance across three benchmarks with no quantitative tables, error bars, or per-scene breakdowns visible in the provided description. Full experimental results must include direct comparisons to distillation baselines with standard metrics and statistical significance to support the efficiency and quality superiority claims.
minor comments (2)
- [Method overview] Clarify the exact number and selection criteria for the synthesized reference views in the Stereo-Anchor mechanism to improve reproducibility.
- [Figures] Ensure all figures showing completed scenes include side-by-side comparisons with ground truth or baseline outputs for visual assessment of artifacts.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback on our work. We have carefully addressed each major comment below with point-by-point responses. Where the suggestions strengthen the validation of our claims, we have incorporated revisions into the manuscript.
read point-by-point responses
-
Referee: [Stereo-Anchor View Selection mechanism] The central performance claims rest on the assumption that Stereo-Anchor View Selection produces 3D Gaussians with metric scale exactly matching the input scene. The manuscript should include quantitative validation (e.g., scale-error metrics or ablation on depth estimation accuracy from synthesized images) in the section describing this mechanism, as depth ambiguities in generative 2D synthesis could propagate to floaters or inconsistencies after Ray-Constrained Registration.
Authors: We agree that additional quantitative validation of metric-scale consistency would further strengthen the paper. In the revised manuscript, we have added a dedicated analysis subsection that reports scale-error metrics (mean absolute scale deviation against ground-truth depths) across the three benchmarks. We also include an ablation examining depth estimation accuracy from the synthesized reference images and its downstream effect on completion quality, confirming that the Stereo-Anchor View Selection effectively resolves scale ambiguities without introducing floaters. revision: yes
-
Referee: [Ray-Constrained Registration strategy] Ray-Constrained Registration is presented as the integration step that avoids geometric artifacts. The paper needs to report specific metrics (e.g., PSNR/SSIM differences with and without the ray constraint, or failure cases on regions with high depth variance) to substantiate that it corrects rather than masks underlying scale or distortion errors from the lifting stage.
Authors: We appreciate this suggestion for stronger substantiation. The revised experimental section now contains an ablation study that directly compares PSNR and SSIM with and without the ray constraint, showing consistent gains in geometric fidelity. We further analyze and report failure cases on high depth-variance regions, demonstrating that the constraint actively corrects scale and distortion errors from the lifting stage rather than simply masking them. revision: yes
-
Referee: [Experimental results] The abstract and results sections assert SOTA performance across three benchmarks with no quantitative tables, error bars, or per-scene breakdowns visible in the provided description. Full experimental results must include direct comparisons to distillation baselines with standard metrics and statistical significance to support the efficiency and quality superiority claims.
Authors: The full manuscript already presents comprehensive quantitative tables with direct comparisons to distillation baselines using PSNR, SSIM, and LPIPS, including per-scene breakdowns on all three benchmarks. To address the referee's request, we have added error bars to the aggregate results and included statistical significance testing (paired t-tests) between GSCompleter and the strongest baselines. These enhancements are now explicitly highlighted in the results section. revision: partial
Circularity Check
No circularity: method relies on independent geometric registration pipeline
full rationale
The paper describes a Generate-then-Register workflow that synthesizes 2D reference images, lifts them to metric-scale 3D Gaussians using Stereo-Anchor View Selection, and integrates via Ray-Constrained Registration. No equations, fitted parameters, or self-referential definitions appear in the abstract or described claims that would make any output equivalent to the input by construction. The approach is presented as an alternative to distillation-based methods and is evaluated against external baselines on three benchmarks, rendering the derivation self-contained without load-bearing self-citations or ansatz smuggling.
Axiom & Free-Parameter Ledger
invented entities (2)
-
Stereo-Anchor View Selection
no independent evidence
-
Ray-Constrained Registration
no independent evidence
read the original abstract
3D Gaussian Splatting (3DGS) has revolutionized high-fidelity neural rendering with its explicit representation and efficiency. However, reconstructing scenes from sparse viewpoints suffers from severe geometric voids and floaters due to limited coverage. Current scene completion methods typically rely on an iterative "Repair-then-Distill" paradigm, which is computationally intensive, prone to unstable optimization, and susceptible to overfitting. To address these limitations, we propose GSCompleter, a distillation-free plugin that shifts scene completion to a stable "Generate-then-Register" workflow. Specifically, GSCompleter synthesizes visually plausible 2D reference images and explicitly lifts them into 3D Gaussian primitives with a consistent metric scale via a robust Stereo-Anchor View Selection mechanism. These newly generated primitives are then seamlessly integrated into the global scene using a novel Ray-Constrained Registration strategy. By replacing unstable distillation with rapid geometric registration, GSCompleter exhibits superior 3DGS completion performance across three benchmarks, enhancing both quality and efficiency over various baselines and achieving new state-of-the-art (SOTA) results.
Figures












Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
shifts scene completion to a stable 'Generate-then-Register' workflow... Stereo-Anchor View Selection... Ray-Constrained Registration
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
metric scale... feed-forward Gaussian regressor... RANSAC global alignment
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 1 Pith paper
-
PE-Field 4D: Video Generation Models as Canvas
Warping reference tokens' positional encodings into the target view, with depth offsets and frame-level compression fixes, improves geometry-aware camera control in video diffusion transformers.
Reference graph
Works this paper leans on
-
[1]
arXiv preprint arXiv:2510.20385 (2025)
Bai, Y ., Li, H., and Huang, Q. Positional encoding field. arXiv preprint arXiv:2510.20385,
-
[2]
Cong, W., Zhu, H., Wang, K., Lei, J., Stearns, C., Cai, Y ., Guibas, L., Wang, Z., and Fan, Z. Videolifter: Lifting videos to 3d with fast hierarchical stereo alignment.arXiv preprint arXiv:2501.01949,
-
[3]
InstantSplat: Sparse-view Gaussian Splatting in Seconds
Fan, Z., Cong, W., Wen, K., Wang, K., Zhang, J., Ding, X., Xu, D., Ivanovic, B., Pavone, M., Pavlakos, G., et al. Instantsplat: Sparse-view gaussian splatting in seconds. arXiv preprint arXiv:2403.20309,
-
[4]
CAT3D: Create Anything in 3D with Multi-View Diffusion Models
Gao, R., Holynski, A., Henzler, P., Brussee, A., Martin- Brualla, R., Srinivasan, P., Barron, J. T., and Poole, B. Cat3d: Create anything in 3d with multi-view diffusion models.arXiv preprint arXiv:2405.10314,
work page internal anchor Pith review Pith/arXiv arXiv
-
[5]
VolSplat: Rethinking Feed-Forward 3D Gaussian Splatting with Voxel-Aligned Prediction
Wang, W., Chen, Y ., Zhang, Z., Liu, H., Wang, H., Feng, Z., Qin, W., Chen, F., Zhu, Z., Chen, D. Y ., et al. V olsplat: Rethinking feed-forward 3d gaussian splatting with voxel- aligned prediction.arXiv preprint arXiv:2509.19297,
work page internal anchor Pith review arXiv
-
[6]
No Pose, No Problem: Surprisingly Simple 3D Gaussian Splats from Sparse Unposed Images
Ye, B., Liu, S., Xu, H., Li, X., Pollefeys, M., Yang, M.-H., and Peng, S. No pose, no problem: Surprisingly simple 3d gaussian splats from sparse unposed images.arXiv preprint arXiv:2410.24207,
-
[7]
Stereo Magnification: Learning View Synthesis using Multiplane Images
Zhang, J., Zhan, F., Xu, M., Lu, S., and Xing, E. Fregs: 3d gaussian splatting with progressive frequency regu- larization. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 21424– 21433, 2024a. Zhang, Z., Hu, W., Lao, Y ., He, T., and Zhao, H. Pixel-gs: Density control with pixel-aware gradient for 3d gaussian splat...
work page internal anchor Pith review Pith/arXiv arXiv
-
[8]
11 GSCompleter: A Distillation-Free Plugin for Metric-Aware 3D Gaussian Splatting Completion in Seconds A. Appendix A.1. Extrapolation Evaluation Protocol In this section, we provide a visual illustration of our 2-view extrapolation protocol. The left figure (a) depicts the view interpolation strategy employed by methods such as PixelSplat (Charatan et al...
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.