Can Predicted Dynamics Exist in the Physical World?
Pith reviewed 2026-06-30 12:59 UTC · model grok-4.3
The pith
Decoded proposals from predictive models can be checked for physical executability by treating them as candidate dynamics and testing kinematic, dynamic, and horizon conditions before execution.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
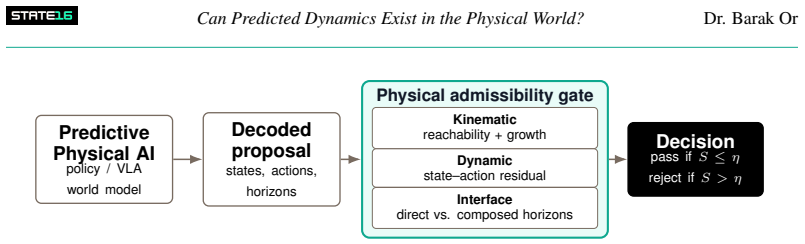
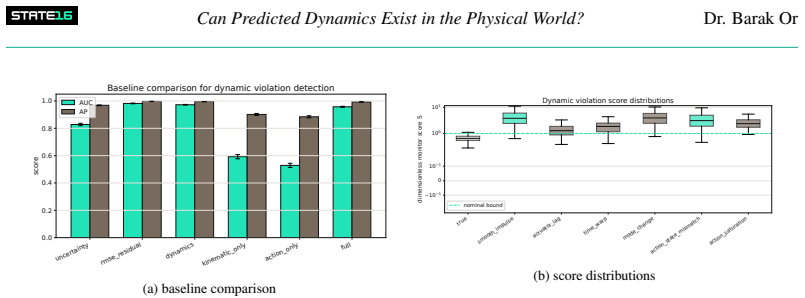
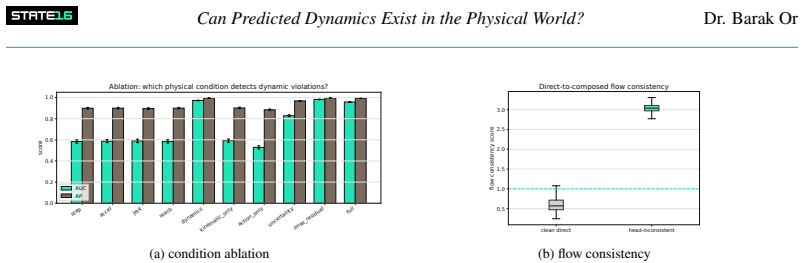
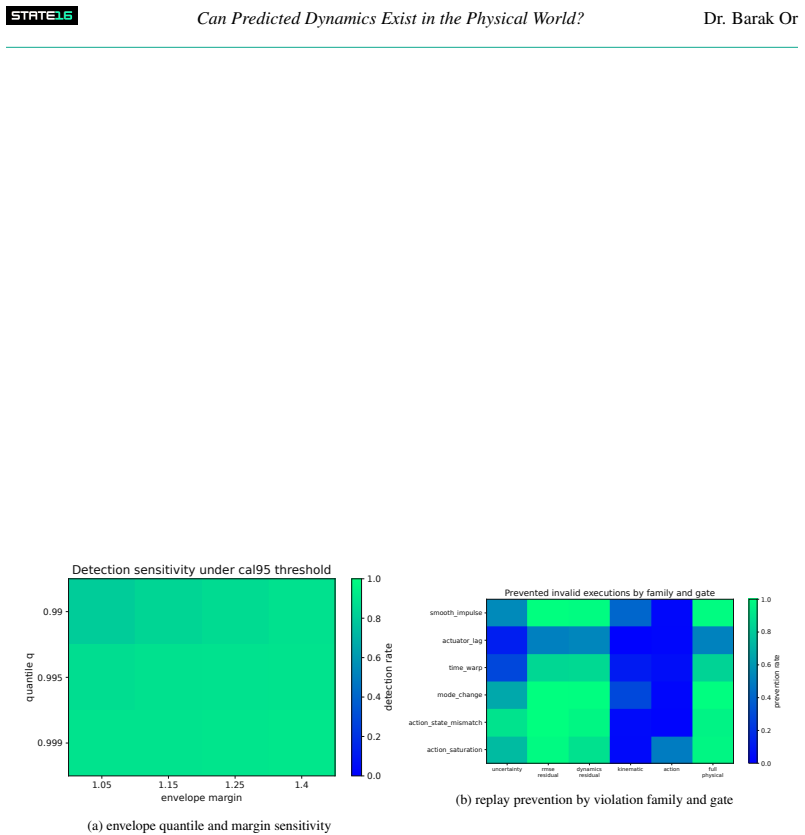
Physical admissibility is formulated as a prediction-control interface. Before execution, a decoded proposal is treated as candidate dynamics and evaluated using kinematic, dynamic, and direct-to-composed horizon conditions. Passing these does not certify task success, but rejection identifies violation of the specified physical envelope and supplies a component-level reason. Controlled falsification on Hugging Face LeRobot PushT shows one-step prediction-RMSE reaching AUC 0.982, standardized dynamics residuals AUC 0.972, kinematic-only conditions AUC 0.592, and the full gate AUC 0.957 with attribution. Replay-based intervention experiments demonstrate that residual-based filters and the ful
What carries the argument
The physical-admissibility gate, which treats a decoded proposal as candidate dynamics and applies kinematic, dynamic, and direct-to-composed horizon conditions to test physical executability.
If this is right
- Prediction error alone does not ensure a proposal is physically executable.
- The gate supplies condition-level attribution to explain why a proposal is rejected.
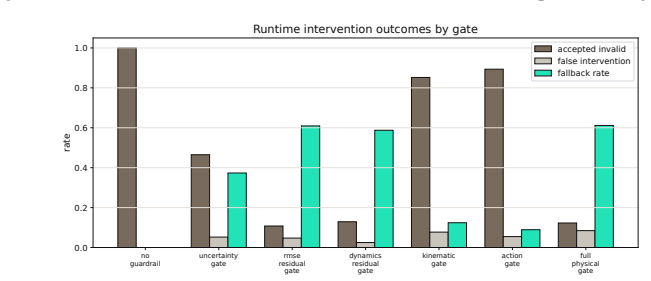
- Residual-based filters combined with the gate block most invalid proposals.
- Task progress remains nearly unchanged after the filtering step.
Where Pith is reading between the lines
- The gate could be inserted upstream of execution in other predictive robotic controllers to reduce unsafe actions.
- The same condition structure might apply to different robot platforms if the kinematic and dynamic thresholds are retuned.
- Longer-horizon proposals could be checked by extending the direct-to-composed horizon test rather than relying solely on one-step residuals.
Load-bearing premise
The kinematic, dynamic, and direct-to-composed horizon conditions together form a sufficient test for physical executability of a decoded proposal.
What would settle it
An experiment in which a proposal passes all three condition sets yet cannot be executed physically, or fails the conditions yet executes successfully without violation.
Figures
read the original abstract
Predictive Physical AI systems output state rollouts, action chunks, and latent plans, yet a low root-mean-square error (RMSE) does not imply that a particular proposal is physically executable. We formulate physical admissibility as a prediction-control interface: before execution, a decoded proposal is treated as candidate dynamics and evaluated using kinematic, dynamic, and direct-to-composed horizon conditions. Passing is not a certificate of task success; rejection identifies violation of the specified physical envelope and gives a component-level reason. On Hugging Face LeRobot PushT, controlled falsification shows that one-step prediction-RMSE and standardized dynamics residuals reach area under the receiver operating characteristic curve (AUC) 0.982 and 0.972, kinematic-only conditions reach AUC 0.592, and the full gate reaches AUC 0.957 with condition-level attribution. In replay-based intervention experiments, residual-based filters and the full physical-admissibility gate prevent 87-$89% of invalid proposals while preserving mean progress near 0.998.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims that physical admissibility of predicted dynamics can be formulated as a prediction-control interface using kinematic, dynamic, and direct-to-composed horizon conditions. On the LeRobot PushT dataset, controlled falsification experiments show AUCs of 0.982 for one-step prediction-RMSE, 0.972 for dynamics residuals, 0.592 for kinematic conditions, and 0.957 for the full gate, with the gate preventing 87-89% of invalid proposals while preserving progress near 0.998.
Significance. If the proposed conditions are demonstrated to be sufficient and non-redundant for physical executability, the work offers a useful pre-execution filter for robotic prediction systems with interpretable rejection reasons. Strengths include the use of a public dataset, condition-level attribution in results, and quantitative reporting of AUC and prevention rates.
major comments (1)
- [abstract (paragraph on formulation of physical admissibility)] The central claim relies on the assumption that the kinematic, dynamic, and direct-to-composed horizon conditions are jointly sufficient to identify all physical violations (i.e., no physically invalid proposal passes all three). However, no derivation, proof, or argument is provided to establish this sufficiency or non-redundancy; the evaluation is limited to empirical AUC on one dataset split without addressing potential unmodeled effects.
minor comments (2)
- [abstract] The description of how the horizon conditions are computed, the exact setup of controlled falsification, and any error bars or statistical details on the AUC values are absent, which affects reproducibility and assessment of the reported numbers.
- [abstract] The prevention rate is written as '87-$89%'; this appears to be a LaTeX artifact and should be corrected to '87-89%'.
Simulated Author's Rebuttal
We thank the referee for the detailed review and constructive comments. We address the major comment point by point below, clarifying the scope and intent of the formulation in the manuscript.
read point-by-point responses
-
Referee: [abstract (paragraph on formulation of physical admissibility)] The central claim relies on the assumption that the kinematic, dynamic, and direct-to-composed horizon conditions are jointly sufficient to identify all physical violations (i.e., no physically invalid proposal passes all three). However, no derivation, proof, or argument is provided to establish this sufficiency or non-redundancy; the evaluation is limited to empirical AUC on one dataset split without addressing potential unmodeled effects.
Authors: We appreciate this observation but note that the manuscript does not advance a claim of joint sufficiency for identifying all possible physical violations. Physical admissibility is explicitly formulated as a prediction-control interface that rejects proposals violating the specified kinematic, dynamic, and direct-to-composed horizon conditions, with the abstract stating that 'rejection identifies violation of the specified physical envelope and gives a component-level reason.' These conditions define an operational filter rather than a complete physical model; no derivation or proof of completeness is provided because the work presents a practical, interpretable interface rather than a theorem establishing exhaustiveness. The evaluation uses controlled falsification on the public LeRobot PushT dataset to quantify detection performance (AUC 0.957 for the full gate) and intervention effectiveness (87-89% prevention of invalid proposals), with condition-level attribution. We acknowledge that the empirical scope is limited to one dataset split and does not address unmodeled effects outside the defined conditions, consistent with the paper's focus on this specific filter. revision: no
Circularity Check
No significant circularity; metrics derived from external dataset evaluation
full rationale
The paper formulates physical admissibility via three families of conditions (kinematic, dynamic, direct-to-composed horizon) and reports AUC values plus intervention prevention rates on the external Hugging Face LeRobot PushT dataset via controlled falsification. No equations, fitted parameters, or self-citations are shown that reduce the reported AUC 0.957, 87-89% prevention figures, or condition-level attributions to quantities defined or fitted inside the same paper. The evaluation remains statistically independent of the condition definitions themselves, satisfying the requirement for an externally falsifiable measurement rather than a self-referential construction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Kinematic, dynamic, and direct-to-composed horizon conditions together identify violations of the physical envelope
Reference graph
Works this paper leans on
-
[1]
D. Ha and J. Schmidhuber. World models.arXiv preprint arXiv:1803.10122, 2018. URL https://arxiv.org/abs/1803.10122
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[2]
K. Chua, R. Calandra, R. McAllister, and S. Levine. Deep reinforcement learning in a handful of trials using probabilistic dynamics models. InAdvances in Neural Information Processing Systems, 2018. URLhttps://arxiv.org/abs/1805.12114
work page internal anchor Pith review Pith/arXiv arXiv 2018
- [3]
-
[4]
Learning Latent Dynamics for Planning from Pixels
D. Hafner, T. Lillicrap, I. Fischer, R. Villegas, D. Ha, H. Lee, and J. Davidson. Learning latent dynamics for planning from pixels, 2019. URLhttps://arxiv.org/abs/1811.04551
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[5]
Dream to Control: Learning Behaviors by Latent Imagination
D. Hafner, T. Lillicrap, J. Ba, and M. Norouzi. Dream to control: Learning behaviors by latent imagination. InInternational Conference on Learning Representations, 2020. URL https://arxiv.org/abs/1912.01603
work page internal anchor Pith review Pith/arXiv arXiv 2020
-
[6]
RT-1: Robotics Transformer for Real-World Control at Scale
A. Brohan, N. Brown, J. Carbajal, Y . Chebotar, J. Dabis, C. Finn, K. Gopalakrishnan, K. Haus- man, A. Herzog, J. Hsu, et al. RT-1: Robotics transformer for real-world control at scale, 2022. URLhttps://arxiv.org/abs/2212.06817
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[7]
RT-2: Vision-Language-Action Models Transfer Web Knowledge to Robotic Control
A. Brohan, N. Brown, J. Carbajal, Y . Chebotar, X. Chen, K. Choromanski, T. Ding, D. Driess, A. Dubey, C. Finn, et al. RT-2: Vision-language-action models transfer web knowledge to robotic control, 2023. URLhttps://arxiv.org/abs/2307.15818
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[8]
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Open X-Embodiment Collaboration. Open X-embodiment: Robotic learning datasets and RT- X models, 2023. URLhttps://arxiv.org/abs/2310.08864
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[9]
Octo: An Open-Source Generalist Robot Policy
Octo Model Team, D. Ghosh, H. Walke, K. Pertsch, K. Black, O. Mees, S. Dasari, J. Hejna, T. Kreiman, C. Xu, et al. Octo: An open-source generalist robot policy, 2024. URLhttps: //arxiv.org/abs/2405.12213
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[10]
M. J. Kim, K. Pertsch, S. Karamcheti, T. Xiao, A. Balakrishna, S. Nair, R. Rafailov, E. Foster, G. Lam, P. Sanketi, et al. OpenVLA: An open-source vision-language-action model, 2024. URLhttps://arxiv.org/abs/2406.09246
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[11]
$\pi_0$: A Vision-Language-Action Flow Model for General Robot Control
K. Black, N. Brown, D. Driess, A. Esmail, M. Equi, C. Finn, N. Fusai, L. Groom, K. Hausman, B. Ichter, et al.π 0: A vision-language-action flow model for general robot control, 2024. URL https://arxiv.org/abs/2410.24164
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[12]
SmolVLA: A Vision-Language-Action Model for Affordable and Efficient Robotics
M. Shukor, D. Aubakirova, F. Capuano, P. Kooijmans, S. Palma, A. Zouitine, M. Aractingi, C. Pascal, M. Russi, A. Marafioti, S. Alibert, M. Cord, T. Wolf, and R. Cadene. SmolVLA: A vision-language-action model for affordable and efficient robotics, 2025. URLhttps: //arxiv.org/abs/2506.01844
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[13]
GR00T N1: An Open Foundation Model for Generalist Humanoid Robots
NVIDIA, J. Bjorck, F. Casta ˜neda, N. Cherniadev, X. Da, R. Ding, L. Fan, et al. GR00T N1: An open foundation model for generalist humanoid robots, 2025. URLhttps://arxiv.org/ abs/2503.14734. 9 Can Predicted Dynamics Exist in the Physical World?Dr. Barak Or
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[14]
Cadene, S
R. Cadene, S. Aliberts, F. Capuano, M. Aractingi, A. Zouitine, P. Kooijmans, J. Choghari, M. Russi, C. Pascal, S. Palma, M. Shukor, J. Moss, A. Soare, D. Aubakirova, Q. Lhoest, Q. Gallou´edec, and T. Wolf. LeRobot: An open-source library for end-to-end robot learning,
- [15]
-
[16]
K. Kawaharazuka, J. Oh, J. Yamada, I. Posner, and Y . Zhu. Vision-language-action models for robotics: A review towards real-world applications, 2025. URLhttps://arxiv.org/abs/ 2510.07077
-
[17]
S. James, Z. Ma, D. R. Arrojo, and A. J. Davison. RLBench: The robot learning benchmark and learning environment.IEEE Robotics and Automation Letters, 5(2):3019–3026, 2020. doi:10.1109/LRA.2020.2974707. URLhttps://doi.org/10.1109/LRA.2020.2974707
-
[18]
T. Yu, D. Quillen, Z. He, R. Julian, A. Narayan, H. Shively, A. Bellathur, K. Hausman, C. Finn, and S. Levine. Meta-World: A benchmark and evaluation for multi-task and meta reinforce- ment learning. InProceedings of the Conference on Robot Learning, pages 1094–1100, 2020. URLhttps://proceedings.mlr.press/v100/yu20a.html
2020
- [19]
-
[20]
B. Liu, Y . Zhu, C. Gao, Y . Feng, Q. Liu, Y . Zhu, and P. Stone. LIBERO: Benchmarking knowledge transfer for lifelong robot learning, 2023. URLhttps://arxiv.org/abs/2306. 03310
2023
-
[21]
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
A. Khazatsky, K. Pertsch, S. Nair, A. Balakrishna, S. Dasari, S. Karamcheti, S. Nasiriany, et al. DROID: A large-scale in-the-wild robot manipulation dataset, 2024. URLhttps: //arxiv.org/abs/2403.12945
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[22]
What Matters in Learning from Offline Human Demonstrations for Robot Manipulation
A. Mandlekar, D. Xu, J. Wong, S. Nasiriany, C. Wang, R. Kulkarni, L. Fei-Fei, S. Savarese, Y . Zhu, and R. Mart´ın-Mart´ın. What matters in learning from offline human demonstrations for robot manipulation. InProceedings of the Conference on Robot Learning, 2021. URL https://arxiv.org/abs/2108.03298
work page internal anchor Pith review Pith/arXiv arXiv 2021
- [23]
-
[24]
C. Chi, Z. Xu, S. Feng, E. Cousineau, Y . Du, B. Burchfiel, R. Tedrake, and S. Song. Diffusion policy: Visuomotor policy learning via action diffusion, 2023. URLhttps://arxiv.org/ abs/2303.04137
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[25]
T. Z. Zhao, V . Kumar, S. Levine, and C. Finn. Learning fine-grained bimanual manipulation with low-cost hardware, 2023. URLhttps://arxiv.org/abs/2304.13705
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[26]
Mastering Diverse Domains through World Models
D. Hafner, J. Pasukonis, J. Ba, and T. Lillicrap. Mastering diverse domains through world models.arXiv preprint arXiv:2301.04104, 2023. URLhttps://arxiv.org/abs/2301. 04104
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[27]
J. Schrittwieser, I. Antonoglou, T. Hubert, K. Simonyan, L. Sifre, S. Schmitt, A. Guez, E. Lock- hart, D. Hassabis, T. Graepel, et al. Mastering atari, go, chess and shogi by planning with a learned model.Nature, 588(7839):604–609, 2020. doi:10.1038/s41586-020-03051-4. URL https://doi.org/10.1038/s41586-020-03051-4
work page internal anchor Pith review doi:10.1038/s41586-020-03051-4 2020
-
[28]
doi: https://doi.org/10.1016/j.jcp.2018.10.045
M. Raissi, P. Perdikaris, and G. E. Karniadakis. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear par- tial differential equations.Journal of Computational Physics, 378:686–707, 2019. doi: 10.1016/j.jcp.2018.10.045. URLhttps://doi.org/10.1016/j.jcp.2018.10.045. 10 Can Predicted Dynami...
-
[29]
Available: https://arxiv.org/abs/1906.01563
S. Greydanus, M. Dzamba, and J. Yosinski. Hamiltonian neural networks, 2019. URLhttps: //arxiv.org/abs/1906.01563
-
[30]
M. Cranmer, S. Greydanus, S. Hoyer, P. Battaglia, D. Spergel, and S. Ho. Lagrangian neural networks, 2020. URLhttps://arxiv.org/abs/2003.04630
-
[31]
Sanchez-Gonzalez, J
A. Sanchez-Gonzalez, J. Godwin, T. Pfaff, R. Ying, J. Leskovec, and P. W. Battaglia. Learning to simulate complex physics with graph networks. InProceedings of the 37th International Conference on Machine Learning, pages 8459–8468, 2020. URLhttps://proceedings. mlr.press/v119/sanchez-gonzalez20a.html
2020
-
[32]
Qureshi, Anthony Simeonov, Mayur J
C. Finn and S. Levine. Deep visual foresight for planning robot motion. In2017 IEEE Interna- tional Conference on Robotics and Automation, pages 2786–2793, 2017. doi:10.1109/ICRA. 2017.7989324. URLhttps://arxiv.org/abs/1610.00696
-
[33]
Visual Foresight: Model-Based Deep Reinforcement Learning for Vision-Based Robotic Control
F. Ebert, C. Finn, S. Dasari, A. Xie, A. Lee, and S. Levine. Visual foresight: Model-based deep reinforcement learning for vision-based robotic control. InProceedings of the Conference on Robot Learning, 2018. URLhttps://arxiv.org/abs/1812.00568
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[34]
Garc ´ıa and F
J. Garc ´ıa and F. Fern´andez. A comprehensive survey on safe reinforcement learning.Journal of Machine Learning Research, 16(1):1437–1480, 2015. URLhttps://jmlr.org/papers/ v16/garcia15a.html
2015
-
[35]
Constrained Policy Optimization
J. Achiam, D. Held, A. Tamar, and P. Abbeel. Constrained policy optimization. InProceedings of the 34th International Conference on Machine Learning, pages 22–31, 2017. URLhttps: //arxiv.org/abs/1705.10528
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[36]
J. F. Fisac, A. K. Akametalu, M. N. Zeilinger, S. Kaynama, J. Gillula, and C. J. Tomlin. Bridg- ing hamilton-jacobi safety analysis and reinforcement learning. In2019 International Confer- ence on Robotics and Automation, pages 8550–8556, 2019. doi:10.1109/ICRA.2019.8794107. URLhttps://doi.org/10.1109/ICRA.2019.8794107
-
[37]
I. M. Mitchell, A. M. Bayen, and C. J. Tomlin. A time-dependent Hamilton-Jacobi formulation of reachable sets for continuous dynamic games.IEEE Transactions on Automatic Control, 50(7):947–957, 2005. doi:10.1109/TAC.2005.851439. URLhttps://doi.org/10.1109/ TAC.2005.851439
-
[38]
A. D. Ames, S. Coogan, M. Egerstedt, G. Notomista, K. Sreenath, and P. Tabuada. Control barrier functions: Theory and applications. In2019 18th European Control Conference, pages 3420–3431, 2019. doi:10.23919/ECC.2019.8796030. URLhttps://doi.org/10.23919/ ECC.2019.8796030
-
[39]
K. P. Wabersich and M. N. Zeilinger. A predictive safety filter for learning-based con- trol of constrained nonlinear dynamical systems.Automatica, 129:109597, 2021. doi:10. 1016/j.automatica.2021.109597. URLhttps://doi.org/10.1016/j.automatica.2021. 109597
-
[40]
K.-C. Hsu, H. Hu, and J. F. Fisac. The safety filter: A unified view of safety-critical control in autonomous systems.Annual Review of Control, Robotics, and Autonomous Systems, 7: 47–72, 2024. doi:10.1146/annurev-control-071723-102940. URLhttps://doi.org/10. 1146/annurev-control-071723-102940
-
[41]
D. Seto, B. H. Krogh, L. Sha, and A. Chutinan. The simplex architecture for safe online control system upgrades. InProceedings of the 1998 American Control Conference, pages 3504–3508, 1998. doi:10.1109/ACC.1998.703255. URLhttps://doi.org/10.1109/ACC. 1998.703255. 11 Can Predicted Dynamics Exist in the Physical World?Dr. Barak Or
-
[42]
Paul Blain Levy.Call-By-Push-Value: A Functional/Imperative Synthesis
M. Leucker and C. Schallhart. A brief account of runtime verification.The Journal of Logic and Algebraic Programming, 78(5):293–303, 2009. doi:10.1016/j.jlap.2008.08.004. URL https://doi.org/10.1016/j.jlap.2008.08.004
-
[43]
Safe Reinforcement Learning via Shielding
M. Alshiekh, R. Bloem, R. Ehlers, B. K ¨onighofer, S. Niekum, and U. Topcu. Safe reinforce- ment learning via shielding. InProceedings of the AAAI Conference on Artificial Intelligence, volume 32, 2018. URLhttps://arxiv.org/abs/1708.08611
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[44]
K. L. Hobbs, M. L. Mote, M. Abate, S. Coogan, and E. Feron. Run time assurance for safety- critical systems: An introduction to safety filtering approaches for complex control systems. IEEE Control Systems Magazine, 43(2):28–65, 2023. doi:10.1109/MCS.2023.3234380. URL https://doi.org/10.1109/MCS.2023.3234380
-
[45]
C. Guo, G. Pleiss, Y . Sun, and K. Q. Weinberger. On calibration of modern neural networks. Proceedings of the 34th International Conference on Machine Learning, pages 1321–1330,
-
[46]
URLhttps://arxiv.org/abs/1706.04599
work page internal anchor Pith review Pith/arXiv arXiv
-
[47]
Lakshminarayanan, A
B. Lakshminarayanan, A. Pritzel, and C. Blundell. Simple and scalable predictive uncertainty estimation using deep ensembles. InAdvances in Neural Information Processing Systems,
-
[48]
URLhttps://arxiv.org/abs/1612.01474
work page internal anchor Pith review Pith/arXiv arXiv
-
[49]
G. Katz, C. Barrett, D. L. Dill, K. Julian, and M. J. Kochenderfer. Reluplex: An efficient SMT solver for verifying deep neural networks. InInternational Conference on Computer Aided Verification, pages 97–117. Springer, 2017. doi:10.1007/978-3-319-63387-9 5. URL https://doi.org/10.1007/978-3-319-63387-9_5
-
[50]
T. Gehr, M. Mirman, D. Drachsler-Cohen, P. Tsankov, S. Chaudhuri, and M. Vechev. AI2: Safety and robustness certification of neural networks with abstract interpretation. In2018 IEEE Symposium on Security and Privacy, pages 3–18, 2018. doi:10.1109/SP.2018.00058. URLhttps://doi.org/10.1109/SP.2018.00058
-
[51]
R. Ivanov, J. Weimer, R. Alur, G. J. Pappas, and I. Lee. Verisig: Verifying safety properties of hybrid systems with neural network controllers. InProceedings of the 22nd ACM International Conference on Hybrid Systems: Computation and Control, pages 169–178, 2019. doi:10.1145/ 3302504.3311806. URLhttps://arxiv.org/abs/1811.01828. Appendix A Proof of Propo...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.