Causality-Aware End-to-End Autonomous Driving via Ego-Centric Joint Scene Modeling
Pith reviewed 2026-05-20 20:51 UTC · model grok-4.3
The pith
Causal modeling of ego-agent interactions improves closed-loop driving performance.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
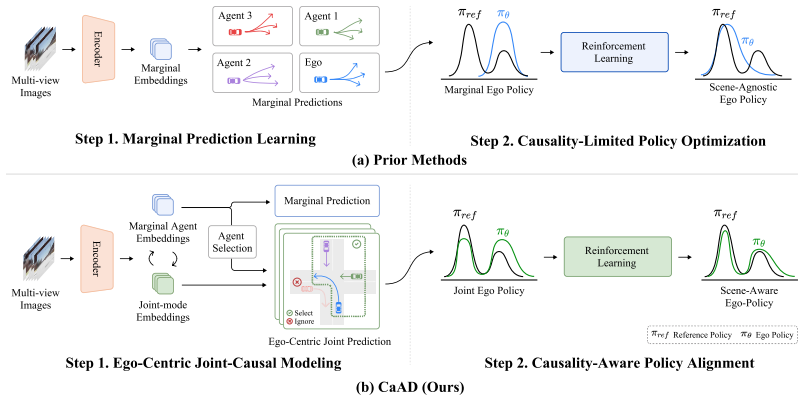
CaAD captures causal inter-dependencies between the ego vehicle and surrounding agents within a shared latent scene representation. An ego-centric joint-causal modeling module built on the marginal prediction branch learns dependencies with interaction-relevant agents. A causality-aware policy alignment stage then uses joint-mode embeddings to match the stochastic ego policy against planning-oriented closed-loop feedback computed from surrounding traffic and map context.
What carries the argument
Ego-centric joint-causal modeling module that learns reciprocal causal relations between ego decisions and neighboring agent behaviors inside a shared latent scene representation.
If this is right
- Trajectory predictions become more consistent when ego and agent actions are reasoned about jointly rather than separately.
- Closed-loop planning benefits from explicit alignment between stochastic policy outputs and traffic-map feedback.
- The same latent scene representation supports both marginal prediction and causal dependency capture.
- Benchmark scores rise when the model accounts for how ego maneuvers alter surrounding agent behavior.
Where Pith is reading between the lines
- The same joint modeling idea could extend to other multi-agent control problems such as robot swarms or traffic signal coordination.
- Removing the need for explicit causal graphs may let the method scale to larger numbers of agents without extra supervision cost.
- Real-world deployment would still require checking whether the learned causal relations hold under sensor noise and unseen map layouts.
Load-bearing premise
The joint-causal modeling module will learn and use the back-and-forth causal links between ego choices and other agents without any separate causal discovery step or extra labels.
What would settle it
A controlled ablation that removes only the joint-causal modeling module and measures the resulting drop in closed-loop Driving Score on interaction-heavy test routes.
Figures



read the original abstract
End-to-end autonomous driving, which bypasses traditional modular pipelines by directly predicting future trajectories from sensor inputs, has recently achieved substantial progress. However, existing methods often overlook the causal inter-dependencies in ego-vehicle planning, ignoring the reciprocal relations between the ego vehicle and surrounding agents. This causal oversight leads to inconsistent and unreliable trajectory predictions, especially in interaction-critical scenarios where ego decisions and neighboring agent behaviors must be reasoned about jointly. To address this limitation, we propose CaAD, a Causality-aware end-to-end Autonomous Driving framework that captures these dependencies within a shared latent scene representation. First, we propose an ego-centric joint-causal modeling module that builds on the marginal prediction branch, and learns causal dependencies between the ego vehicle and interaction-relevant agents. Second, we employ a causality-aware policy alignment stage implemented with joint-mode embeddings to align the stochastic ego policy with planning-oriented closed-loop feedback computed from surrounding traffic and map context. On the Bench2Drive and NAVSIM benchmarks, CaAD demonstrates strong closed-loop planning performance, achieving a Driving Score of 87.53 and Success Rate of 71.81 on Bench2Drive, and a PDMS of 91.1 on NAVSIM. The project page is available at https://moonseokha.github.io/CaAD/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces CaAD, a causality-aware end-to-end autonomous driving framework. It proposes an ego-centric joint-causal modeling module built on the marginal prediction branch to capture causal dependencies between the ego vehicle and interaction-relevant agents in a shared latent scene representation, followed by a causality-aware policy alignment stage using joint-mode embeddings to align the stochastic ego policy with planning-oriented closed-loop feedback. The approach is evaluated on Bench2Drive and NAVSIM, reporting a Driving Score of 87.53, Success Rate of 71.81, and PDMS of 91.1.
Significance. If the causal modeling component demonstrably learns and exploits reciprocal relations rather than correlations, the work could meaningfully advance closed-loop planning in interaction-critical scenarios by reducing inconsistent trajectory predictions. The benchmark results suggest practical gains over prior end-to-end methods, and the explicit focus on causality addresses a recognized limitation in the field.
major comments (2)
- [ego-centric joint-causal modeling module] Ego-centric joint-causal modeling module (described in the methods): No explicit mechanism is provided for enforcing or validating reciprocal causality, such as do-calculus interventions, counterfactual supervision, or ablation isolating this module from standard joint prediction. This is load-bearing for the central claim, as the subsequent policy alignment stage depends on the latent representation encoding directed causal influence rather than statistical co-occurrence.
- [experimental results] Experimental results (Bench2Drive and NAVSIM evaluations): The reported metrics lack ablation studies, error bars, or statistical significance tests that would isolate the contribution of the causality-aware components. Without these, it is unclear whether the gains (e.g., Driving Score 87.53) stem from the proposed causal modeling or from other architectural choices.
minor comments (1)
- [abstract and methods] The abstract and methods would benefit from clearer notation distinguishing the marginal prediction branch from the joint-causal extension.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below with clarifications and indicate planned revisions where appropriate.
read point-by-point responses
-
Referee: [ego-centric joint-causal modeling module] Ego-centric joint-causal modeling module (described in the methods): No explicit mechanism is provided for enforcing or validating reciprocal causality, such as do-calculus interventions, counterfactual supervision, or ablation isolating this module from standard joint prediction. This is load-bearing for the central claim, as the subsequent policy alignment stage depends on the latent representation encoding directed causal influence rather than statistical co-occurrence.
Authors: The ego-centric joint-causal modeling module is designed to capture reciprocal causal dependencies by extending the marginal prediction branch into a shared latent scene representation that conditions predictions on directed influences between the ego vehicle and interaction-relevant agents. While the current implementation does not incorporate explicit do-calculus interventions or counterfactual supervision, it goes beyond statistical co-occurrence through its ego-centric conditioning and joint-mode structure. To strengthen validation of this distinction, we will add an ablation study isolating the module from a standard joint prediction baseline and expand the methods discussion on how the architecture encodes directed causal relations rather than mere correlations. revision: partial
-
Referee: [experimental results] Experimental results (Bench2Drive and NAVSIM evaluations): The reported metrics lack ablation studies, error bars, or statistical significance tests that would isolate the contribution of the causality-aware components. Without these, it is unclear whether the gains (e.g., Driving Score 87.53) stem from the proposed causal modeling or from other architectural choices.
Authors: We agree that the current experimental section would benefit from additional controls to isolate the causality-aware components. We will incorporate ablation studies that remove the ego-centric joint-causal modeling module and the causality-aware policy alignment stage individually. We will also report error bars from multiple independent runs and include statistical significance tests for the key metrics such as Driving Score on Bench2Drive and PDMS on NAVSIM. These changes will be added to the revised manuscript. revision: yes
Circularity Check
No significant circularity in derivation chain.
full rationale
The paper presents a standard end-to-end modeling pipeline: an ego-centric joint-causal modeling module built on a marginal prediction branch, followed by a causality-aware policy alignment stage using joint-mode embeddings. These components are trained on driving datasets and evaluated on independent benchmarks (Bench2Drive, NAVSIM) with reported metrics (Driving Score 87.53, PDMS 91.1). No equations, self-definitions, or fitted-input-as-prediction patterns appear in the abstract or described structure that would make the final claims equivalent to the inputs by construction. The central claims rest on architectural choices and empirical results rather than reducing to self-citation chains or renamed inputs.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanLogicNat recovery unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
causality-aware policy alignment stage implemented with joint-mode embeddings
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
nuscenes: A multimodal dataset for autonomous driving
Holger Caesar, Varun Bankiti, Alex H Lang, Sourabh V ora, Venice Erin Liong, Qiang Xu, Anush Krishnan, Yu Pan, Giancarlo Baldan, and Oscar Beijbom. nuscenes: A multimodal dataset for autonomous driving. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 11621–11631, 2020
work page 2020
-
[2]
NuPlan: A closed-loop ML-based planning benchmark for autonomous vehicles
Holger Caesar, Juraj Kabzan, Kok Seang Tan, Whye Kit Fong, Eric Wolff, Alex Lang, Luke Fletcher, Oscar Beijbom, and Sammy Omari. nuplan: A closed-loop ml-based planning bench- mark for autonomous vehicles.arXiv preprint arXiv:2106.11810, 2021
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[3]
Raphael Chekroun, Marin Toromanoff, Sascha Hornauer, and Fabien Moutarde. Gri: General reinforced imitation and its application to vision-based autonomous driving.Robotics, 12(5):127, 2023
work page 2023
-
[4]
Li Chen, Penghao Wu, Kashyap Chitta, Bernhard Jaeger, Andreas Geiger, and Hongyang Li. End-to-end autonomous driving: Challenges and frontiers.IEEE Transactions on Pattern Analysis and Machine Intelligence, 46(12):10164–10183, 2024
work page 2024
-
[5]
VADv2: End-to-End Vectorized Autonomous Driving via Probabilistic Planning
Shaoyu Chen, Bo Jiang, Hao Gao, Bencheng Liao, Qing Xu, Qian Zhang, Chang Huang, Wenyu Liu, and Xinggang Wang. Vadv2: End-to-end vectorized autonomous driving via probabilistic planning.arXiv preprint arXiv:2402.13243, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[6]
Neat: Neural attention fields for end- to-end autonomous driving
Kashyap Chitta, Aditya Prakash, and Andreas Geiger. Neat: Neural attention fields for end- to-end autonomous driving. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 15793–15803, 2021
work page 2021
-
[7]
Kashyap Chitta, Aditya Prakash, Bernhard Jaeger, Zehao Yu, Katrin Renz, and Andreas Geiger. Transfuser: Imitation with transformer-based sensor fusion for autonomous driving.IEEE transactions on pattern analysis and machine intelligence, 45(11):12878–12895, 2022
work page 2022
-
[8]
Parting with mis- conceptions about learning-based vehicle motion planning
Daniel Dauner, Marcel Hallgarten, Andreas Geiger, and Kashyap Chitta. Parting with mis- conceptions about learning-based vehicle motion planning. InConference on Robot Learning, pages 1268–1281. PMLR, 2023
work page 2023
-
[9]
Daniel Dauner, Marcel Hallgarten, Tianyu Li, Xinshuo Weng, Zhiyu Huang, Zetong Yang, Hongyang Li, Igor Gilitschenski, Boris Ivanovic, Marco Pavone, et al. Navsim: Data-driven non-reactive autonomous vehicle simulation and benchmarking.Advances in Neural Information Processing Systems, 37:28706–28719, 2024
work page 2024
-
[10]
D’Souza, Samira Ebrahimi Kahou, Felix Heide, and Christopher Pal
Roger Girgis, Florian Golemo, Felipe Codevilla, Martin Weiss, Justin A. D’Souza, Samira Ebrahimi Kahou, Felix Heide, and Christopher Pal. Latent variable sequential set transformers for joint multi-agent motion prediction. InInternational Conference on Learning Representations, 2022
work page 2022
-
[11]
DeepSeek-R1: Incentivizing Reasoning Capability in LLMs via Reinforcement Learning
Daya Guo, Dejian Yang, Haowei Zhang, Junxiao Song, Ruoyu Zhang, Runxin Xu, Qihao Zhu, Shirong Ma, Peiyi Wang, Xiao Bi, et al. Deepseek-r1: Incentivizing reasoning capability in llms via reinforcement learning.arXiv preprint arXiv:2501.12948, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[12]
Deep residual learning for image recognition
Kaiming He, Xiangyu Zhang, Shaoqing Ren, and Jian Sun. Deep residual learning for image recognition. InProceedings of the IEEE conference on computer vision and pattern recognition, pages 770–778, 2016
work page 2016
-
[13]
Planning-oriented autonomous driving
Yihan Hu, Jiazhi Yang, Li Chen, Keyu Li, Chonghao Sima, Xizhou Zhu, Siqi Chai, Senyao Du, Tianwei Lin, Wenhai Wang, et al. Planning-oriented autonomous driving. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 17853–17862, 2023
work page 2023
-
[14]
EMMA: End-to-End Multimodal Model for Autonomous Driving
Jyh-Jing Hwang, Runsheng Xu, Hubert Lin, Wei-Chih Hung, Jingwei Ji, Kristy Choi, Di Huang, Tong He, Paul Covington, Benjamin Sapp, et al. Emma: End-to-end multimodal model for autonomous driving.arXiv preprint arXiv:2410.23262, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[15]
Xiaosong Jia, Zhenjie Yang, Qifeng Li, Zhiyuan Zhang, and Junchi Yan. Bench2drive: Towards multi-ability benchmarking of closed-loop end-to-end autonomous driving.Advances in Neural Information Processing Systems, 37:819–844, 2024. 10
work page 2024
-
[16]
Xiaosong Jia, Junqi You, Zhiyuan Zhang, and Junchi Yan. Drivetransformer: Unified transformer for scalable end-to-end autonomous driving.arXiv preprint arXiv:2503.07656, 2025
-
[17]
Vad: Vectorized scene representation for efficient autonomous driving
Bo Jiang, Shaoyu Chen, Qing Xu, Bencheng Liao, Jiajie Chen, Helong Zhou, Qian Zhang, Wenyu Liu, Chang Huang, and Xinggang Wang. Vad: Vectorized scene representation for efficient autonomous driving. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 8340–8350, 2023
work page 2023
-
[18]
Bo Jiang, Shaoyu Chen, Qian Zhang, Wenyu Liu, and Xinggang Wang. Alphadrive: Unleashing the power of vlms in autonomous driving via reinforcement learning and reasoning.arXiv preprint arXiv:2503.07608, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[19]
Jungho Kim, Jiyong Oh, Seunghoon Yu, Hongjae Shin, Donghyuk Kwak, and Jun Won Choi. Safedrive: Fine-grained safety reasoning for end-to-end driving in a sparse world.arXiv preprint arXiv:2602.18887, 2026
-
[20]
Derun Li, Changye Li, Yue Wang, Jianwei Ren, Xin Wen, Pengxiang Li, Leimeng Xu, Kun Zhan, Peng Jia, Xianpeng Lang, et al. Learning personalized driving styles via reinforcement learning from human feedback.arXiv preprint arXiv:2503.10434, 2025
-
[21]
Kailin Li, Zhenxin Li, Shiyi Lan, Yuan Xie, Zhizhong Zhang, Jiayi Liu, Zuxuan Wu, Zhiding Yu, and Jose M Alvarez. Hydra-mdp++: Advancing end-to-end driving via expert-guided hydra-distillation.arXiv preprint arXiv:2503.12820, 2025
-
[22]
Qifeng Li, Xiaosong Jia, Shaobo Wang, and Junchi Yan. Think2drive: Efficient reinforcement learning by thinking with latent world model for autonomous driving (in carla-v2). InEuropean Conference on Computer Vision, pages 142–158. Springer, 2024
work page 2024
-
[23]
Enhancing End-to-End Autonomous Driving with Latent World Model
Yingyan Li, Lue Fan, Jiawei He, Yuqi Wang, Yuntao Chen, Zhaoxiang Zhang, and Tieniu Tan. Enhancing end-to-end autonomous driving with latent world model.arXiv preprint arXiv:2406.08481, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
- [24]
-
[25]
ReCogDrive: A Reinforced Cognitive Framework for End-to-End Autonomous Driving
Yongkang Li, Kaixin Xiong, Xiangyu Guo, Fang Li, Sixu Yan, Gangwei Xu, Lijun Zhou, Long Chen, Haiyang Sun, Bing Wang, et al. Recogdrive: A reinforced cognitive framework for end-to-end autonomous driving.arXiv preprint arXiv:2506.08052, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[26]
Hydra-next: Robust closed-loop driving with open-loop training.arXiv preprint arXiv:2503.12030, 2025
Zhenxin Li, Shihao Wang, Shiyi Lan, Zhiding Yu, Zuxuan Wu, and Jose M Alvarez. Hydra-next: Robust closed-loop driving with open-loop training.arXiv preprint arXiv:2503.12030, 2025
-
[27]
Zhiqi Li, Wenhai Wang, Hongyang Li, Enze Xie, Chonghao Sima, Tong Lu, Qiao Yu, and Jifeng Dai. Bevformer: learning bird’s-eye-view representation from lidar-camera via spatiotemporal transformers.IEEE Transactions on Pattern Analysis and Machine Intelligence, 2024
work page 2024
-
[28]
Cirl: Controllable imitative rein- forcement learning for vision-based self-driving
Xiaodan Liang, Tairui Wang, Luona Yang, and Eric Xing. Cirl: Controllable imitative rein- forcement learning for vision-based self-driving. InProceedings of the European conference on computer vision (ECCV), pages 584–599, 2018
work page 2018
-
[29]
Diffusiondrive: Truncated diffusion model for end-to-end autonomous driving
Bencheng Liao, Shaoyu Chen, Haoran Yin, Bo Jiang, Cheng Wang, Sixu Yan, Xinbang Zhang, Xiangyu Li, Ying Zhang, Qian Zhang, et al. Diffusiondrive: Truncated diffusion model for end-to-end autonomous driving. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 12037–12047, 2025
work page 2025
-
[30]
Focal loss for dense object detection
Tsung-Yi Lin, Priya Goyal, Ross Girshick, Kaiming He, and Piotr Dollar. Focal loss for dense object detection. InProceedings of the IEEE international conference on computer vision, pages 2980–2988, 2017
work page 2017
-
[31]
Bevfusion: Multi-task multi-sensor fusion with unified bird’s-eye view representation
Zhijian Liu, Haotian Tang, Alexander Amini, Xinyu Yang, Huizi Mao, Daniela L Rus, and Song Han. Bevfusion: Multi-task multi-sensor fusion with unified bird’s-eye view representation. In2023 IEEE international conference on robotics and automation (ICRA), pages 2774–2781. IEEE, 2023. 11
work page 2023
-
[32]
Decoupled Weight Decay Regularization
Ilya Loshchilov and Frank Hutter. Decoupled weight decay regularization.arXiv preprint arXiv:1711.05101, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[33]
Yiren Lu, Justin Fu, George Tucker, Xinlei Pan, Eli Bronstein, Rebecca Roelofs, Benjamin Sapp, Brandyn White, Aleksandra Faust, Shimon Whiteson, et al. Imitation is not enough: Robustifying imitation with reinforcement learning for challenging driving scenarios. In2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 7553–...
work page 2023
-
[34]
JFP: Joint future prediction with interactive multi-agent modeling for autonomous driving
Wenjie Luo, Cheolho Park, Andre Cornman, Benjamin Sapp, and Dragomir Anguelov. JFP: Joint future prediction with interactive multi-agent modeling for autonomous driving. In Proceedings of The 7th Conference on Robot Learning, volume 205 ofProceedings of Machine Learning Research, pages 1457–1467. PMLR, 2023
work page 2023
-
[35]
Visiontrap: Vision-augmented trajectory prediction guided by textual descriptions
Seokha Moon, Hyun Woo, Hongbeen Park, Haeji Jung, Reza Mahjourian, Hyung-gun Chi, Hyerin Lim, Sangpil Kim, and Jinkyu Kim. Visiontrap: Vision-augmented trajectory prediction guided by textual descriptions. InEuropean Conference on Computer Vision, pages 361–379. Springer, 2024
work page 2024
-
[36]
Wayformer: Motion forecasting via simple & efficient attention networks,
Nigamaa Nayakanti, Rami Al-Rfou, Aurick Zhou, Kratarth Goel, Khaled S Refaat, and Benjamin Sapp. Wayformer: Motion forecasting via simple & efficient attention networks.arXiv preprint arXiv:2207.05844, 2022
-
[37]
Scene transformer: A unified architecture for predicting mul- tiple agent trajectories
Jiquan Ngiam, Benjamin Caine, Vijay Vasudevan, Zhengdong Zhang, Hao-Tien Lewis Chiang, Jeffrey Ling, Rebecca Roelofs, Alex Bewley, Chenxi Liu, Ashish Venugopal, et al. Scene transformer: A unified architecture for predicting multiple agent trajectories.arXiv preprint arXiv:2106.08417, 2021
-
[38]
Refaat, Rami Al-Rfou, and Benjamin Sapp
Ari Seff, Brian Cera, Dian Chen, Mason Ng, Aurick Zhou, Nigamaa Nayakanti, Khaled S. Refaat, Rami Al-Rfou, and Benjamin Sapp. MotionLM: Multi-agent motion forecasting as language modeling. InProceedings of the IEEE/CVF International Conference on Computer Vision, 2023
work page 2023
-
[39]
Shuyao Shang, Yuntao Chen, Yuqi Wang, Yingyan Li, and Zhaoxiang Zhang. Drivedpo: Policy learning via safety dpo for end-to-end autonomous driving.arXiv preprint arXiv:2509.17940, 2025
-
[40]
DeepSeekMath: Pushing the Limits of Mathematical Reasoning in Open Language Models
Zhihong Shao, Peiyi Wang, Qihao Zhu, Runxin Xu, Junxiao Song, Xiao Bi, Haowei Zhang, Mingchuan Zhang, YK Li, Y Wu, et al. Deepseekmath: Pushing the limits of mathematical reasoning in open language models.arXiv preprint arXiv:2402.03300, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[41]
Motion transformer with global intention localization and local movement refinement
Shaoshuai Shi, Li Jiang, Dengxin Dai, and Bernt Schiele. Motion transformer with global intention localization and local movement refinement. InAdvances in Neural Information Processing Systems, 2022
work page 2022
-
[42]
Don’t shake the wheel: Momentum-aware planning in end-to-end autonomous driving
Ziying Song, Caiyan Jia, Lin Liu, Hongyu Pan, Yongchang Zhang, Junming Wang, Xingyu Zhang, Shaoqing Xu, Lei Yang, and Yadan Luo. Don’t shake the wheel: Momentum-aware planning in end-to-end autonomous driving. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 22432–22441, 2025
work page 2025
-
[43]
DIVER: Reinforced Diffusion Breaks Imitation Bottlenecks in End-to-End Autonomous Driving
Ziying Song, Lin Liu, Hongyu Pan, Bencheng Liao, Mingzhe Guo, Lei Yang, Yongchang Zhang, Shaoqing Xu, Caiyan Jia, and Yadan Luo. Diver: Reinforced diffusion breaks imitation bottlenecks in end-to-end autonomous driving.arXiv preprint arXiv:2507.04049, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[44]
M2i: From factored marginal to joint trajectory prediction for highly interactive environments
Qiao Sun, Xin Huang, Brian C Williams, Hang Zhao, et al. M2i: From factored marginal to joint trajectory prediction for highly interactive environments. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 16116–16126, 2022
work page 2022
-
[45]
Wenchao Sun, Xuewu Lin, Keyu Chen, Zixiang Pei, Xiang Li, Yining Shi, and Sifa Zheng. Sparsedrivev2: Scoring is all you need for end-to-end autonomous driving.arXiv preprint arXiv:2603.29163, 2026. 12
-
[46]
Sparsedrive: End-to-end autonomous driving via sparse scene representation
Wenchao Sun, Xuewu Lin, Yining Shi, Chuang Zhang, Haoran Wu, and Sifa Zheng. Sparsedrive: End-to-end autonomous driving via sparse scene representation. In2025 IEEE International Conference on Robotics and Automation (ICRA), pages 8795–8801. IEEE, 2025
work page 2025
-
[47]
Yingqi Tang, Zhuoran Xu, Zhaotie Meng, and Erkang Cheng. Hip-ad: Hierarchical and multi- granularity planning with deformable attention for autonomous driving in a single decoder. arXiv preprint arXiv:2503.08612, 2025
-
[48]
Attention is all you need.Advances in Neural Information Processing Systems, 2017
A Vaswani. Attention is all you need.Advances in Neural Information Processing Systems, 2017
work page 2017
-
[49]
RetroMotion: Retrocausal Motion Forecasting Models are Instructable
Royden Wagner, Omer Sahin Tas, Felix Hauser, Marlon Steiner, Dominik Strutz, Abhishek Vivekanandan, Carlos Fernandez, and Christoph Stiller. Retromotion: Retrocausal motion forecasting models are instructable.arXiv preprint arXiv:2505.20414, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[50]
Royden Wagner, Omer Sahin Tas, Marvin Klemp, and Carlos Fernandez. Jointmotion: joint self-supervision for joint motion prediction.arXiv preprint arXiv:2403.05489, 2024
-
[51]
Yan Wang, Wenjie Luo, Junjie Bai, Yulong Cao, Tong Che, Ke Chen, Yuxiao Chen, Jenna Dia- mond, Yifan Ding, Wenhao Ding, et al. Alpamayo-r1: Bridging reasoning and action prediction for generalizable autonomous driving in the long tail.arXiv preprint arXiv:2511.00088, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[52]
Para-drive: Par- allelized architecture for real-time autonomous driving
Xinshuo Weng, Boris Ivanovic, Yan Wang, Yue Wang, and Marco Pavone. Para-drive: Par- allelized architecture for real-time autonomous driving. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 15449–15458, 2024
work page 2024
-
[53]
Zebin Xing, Xingyu Zhang, Yang Hu, Bo Jiang, Tong He, Qian Zhang, Xiaoxiao Long, and Wei Yin. Goalflow: Goal-driven flow matching for multimodal trajectories generation in end- to-end autonomous driving. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 1602–1611, 2025
work page 2025
-
[54]
Second: Sparsely embedded convolutional detection.Sensors, 18(10), 2018
Yan Yan, Yuxing Mao, and Bo Li. Second: Sparsely embedded convolutional detection.Sensors, 18(10), 2018
work page 2018
-
[55]
Zhenjie Yang, Xiaosong Jia, Qifeng Li, Xue Yang, Maoqing Yao, and Junchi Yan. Raw2drive: Reinforcement learning with aligned world models for end-to-end autonomous driving (in carla v2).arXiv preprint arXiv:2505.16394, 2025
-
[56]
Center-based 3d object detection and track- ing
Tianwei Yin, Xingyi Zhou, and Philipp Krahenbuhl. Center-based 3d object detection and track- ing. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 11784–11793, 2021
work page 2021
-
[57]
Zhenlong Yuan, Chengxuan Qian, Jing Tang, Rui Chen, Zijian Song, Lei Sun, Xiangxiang Chu, Yujun Cai, Dapeng Zhang, and Shuo Li. Autodrive-r2: Incentivizing reasoning and self- reflection capacity for vla model in autonomous driving.arXiv preprint arXiv:2509.01944, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[58]
End-to-end interpretable neural motion planner
Wenyuan Zeng, Wenjie Luo, Simon Suo, Abbas Sadat, Bin Yang, Sergio Casas, and Raquel Urtasun. End-to-end interpretable neural motion planner. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 8660–8669, 2019
work page 2019
-
[59]
Bozhou Zhang, Nan Song, Jingyu Li, Xiatian Zhu, Jiankang Deng, and Li Zhang. Future-aware end-to-end driving: Bidirectional modeling of trajectory planning and scene evolution.arXiv preprint arXiv:2510.11092, 2025
-
[60]
Jinqing Zhang, Zehua Fu, Zelin Xu, Wenying Dai, Qingjie Liu, and Yunhong Wang. Resworld: Temporal residual world model for end-to-end autonomous driving.arXiv preprint arXiv:2602.10884, 2026
-
[61]
Genad: Gen- erative end-to-end autonomous driving
Wenzhao Zheng, Ruiqi Song, Xianda Guo, Chenming Zhang, and Long Chen. Genad: Gen- erative end-to-end autonomous driving. InEuropean Conference on Computer Vision, pages 87–104. Springer, 2024. 13
work page 2024
-
[62]
World4drive: End-to-end autonomous driving via intention-aware physical latent world model
Yupeng Zheng, Pengxuan Yang, Zebin Xing, Qichao Zhang, Yuhang Zheng, Yinfeng Gao, Pengfei Li, Teng Zhang, Zhongpu Xia, Peng Jia, et al. World4drive: End-to-end autonomous driving via intention-aware physical latent world model. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 28632–28642, 2025
work page 2025
-
[63]
V oxelnet: End-to-end learning for point cloud based 3d object detection
Yin Zhou and Oncel Tuzel. V oxelnet: End-to-end learning for point cloud based 3d object detection. InProceedings of the IEEE conference on computer vision and pattern recognition, pages 4490–4499, 2018
work page 2018
-
[64]
Query-centric trajectory prediction
Zikang Zhou, Jianping Wang, Yung-Hui Li, and Yu-Kai Huang. Query-centric trajectory prediction. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 17863–17873, 2023
work page 2023
-
[65]
Hidden biases of end-to-end driving datasets
Julian Zimmerlin, Jens Beißwenger, Bernhard Jaeger, Andreas Geiger, and Kashyap Chitta. Hidden biases of end-to-end driving datasets.arXiv preprint arXiv:2412.09602, 2024
-
[66]
Jialv Zou, Shaoyu Chen, Bencheng Liao, Zhiyu Zheng, Yuehao Song, Lefei Zhang, Qian Zhang, Wenyu Liu, and Xinggang Wang. Diffusiondrivev2: Reinforcement learning-constrained truncated diffusion modeling in end-to-end autonomous driving, 2025. 14 Appendix A Additional Related Work A.1 End-to-End Planning for Autonomous Driving End-to-end autonomous driving ...
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.