Recognition: no theorem link
From Reaction to Anticipation: Proactive Failure Recovery through Agentic Task Graph for Robotic Manipulation
Pith reviewed 2026-05-13 05:09 UTC · model grok-4.3
The pith
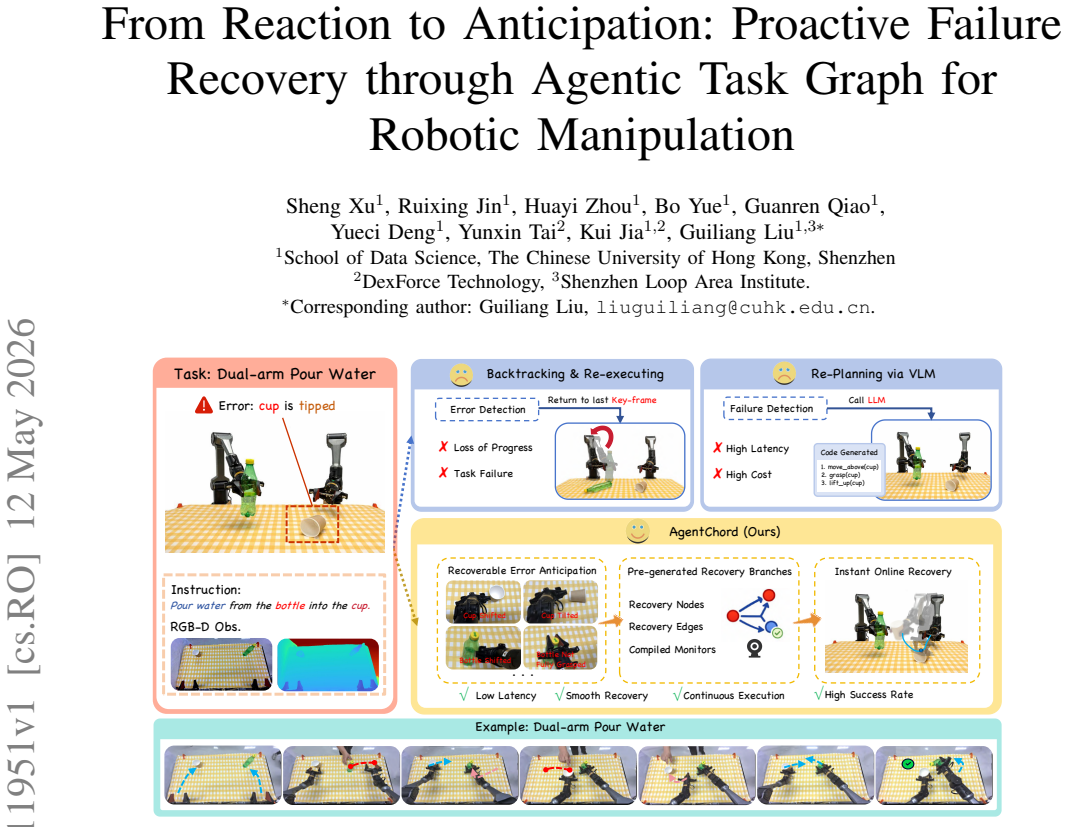
AgentChord pre-enriches robotic task graphs with anticipatory recovery branches so failures trigger immediate corrective actions without re-planning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
AgentChord models a manipulation task as a directed task graph that a composer agent first structures from the nominal plan; an arranger agent then augments the graph with anticipatory recovery branches that specify context-aware corrective behaviors; a conductor agent compiles these into executable transitions and uses low-latency monitors to detect deviations and trigger the pre-compiled recoveries without invoking re-planning.
What carries the argument
A directed task graph enriched before execution with anticipatory recovery branches that the conductor agent traverses using low-latency monitors.
If this is right
- Long-horizon bimanual manipulation tasks achieve higher success rates because recovery happens at the moment of detection rather than after a separate reasoning step.
- Execution efficiency rises because the system avoids repeated calls to a planner after each failure.
- Real-world robotic autonomy increases in unstructured settings where small disturbances are common but predictable in type.
- The same graph structure can support multiple specialized agents working in coordination without central re-planning overhead.
Where Pith is reading between the lines
- If the recovery branches prove comprehensive enough, similar pre-compilation techniques could be applied to other sequential decision systems that currently rely on online replanning.
- The approach may trade off some flexibility for speed, suggesting a useful boundary condition: tasks whose failure modes are hard to enumerate in advance may still need hybrid reactive layers.
- Extending the conductor to update the graph online from observed failures could turn the static anticipatory design into an incrementally learning one.
Load-bearing premise
The set of possible failures that matter can be anticipated and turned into pre-specified recovery branches without leaving important cases uncovered or creating conflicting transitions.
What would settle it
Run the system on a long-horizon bimanual task that contains a failure mode absent from the pre-added branches; measure whether the conductor can still recover without falling back to full re-planning or failing outright.
Figures








read the original abstract
Although robotic manipulation has made significant progress, reliable execution remains challenging because task failures are inevitable in dynamic and unstructured environments. To handle such failures, existing frameworks typically follow a stepwise detect-reason-recover pipeline, which often incurs high latency and limited robustness due to delayed reasoning and reactive planning. Inspired by the human capability to anticipate and proactively plan for potential failures, we introduce AgentChord, an agentic system that models a manipulation task as a directed task graph. Before execution, this graph is enriched with anticipatory recovery branches that specify context-aware corrective behaviors, enabling immediate and targeted responses when failures occur. Specifically, AgentChord operates through a choreography of specialized agents: a composer that structures the nominal task graph, an arranger that augments the graph with anticipatory recovery branches, and a conductor that compiles and coordinates executable transitions using low-latency monitors to detect deviations and trigger pre-compiled recoveries without re-planning. Empirical studies on diverse long-horizon bimanual manipulation tasks demonstrate that AgentChord substantially improves success rates and execution efficiency, advancing the reliability and autonomy of real-world robotic systems. The project page is available at: https://shengxu.net/AgentChord/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces AgentChord, a multi-agent system for robotic manipulation that represents tasks as directed graphs. A composer agent builds the nominal task graph, an arranger agent augments it with anticipatory recovery branches specifying context-aware corrections, and a conductor agent compiles executable transitions monitored by low-latency detectors that trigger pre-compiled recoveries without re-planning. The central empirical claim is that this proactive enrichment yields substantially higher success rates and better execution efficiency than reactive detect-reason-recover pipelines on diverse long-horizon bimanual manipulation tasks.
Significance. If the reported gains are shown to arise from genuine anticipation rather than exhaustive pre-specification of recoveries, the work would offer a concrete mechanism for reducing latency in failure handling and could improve reliability in unstructured environments. The agentic task-graph choreography is a novel construction that, if accompanied by reproducible code or detailed failure-coverage analysis, would strengthen the case for shifting from reactive to proactive recovery in manipulation frameworks.
major comments (2)
- [Abstract / Empirical studies] Abstract and empirical evaluation section: The claim that AgentChord 'substantially improves success rates and execution efficiency' is the load-bearing result, yet no baselines, quantitative metrics (e.g., success rate definition, time-to-completion), trial counts, or statistical controls are supplied. Without these, it is impossible to determine whether the gains exceed what exhaustive pre-planning of recoveries would achieve.
- [AgentChord architecture] System overview and conductor description: The conductor is stated to trigger only pre-compiled transitions on monitor-detected deviations. The manuscript provides no analysis or experiment showing that the failures encountered during evaluation lie outside the recovery branches supplied by the arranger; if they overlap, the low-latency advantage is explained by pre-enumeration rather than anticipation, directly undermining the central contrast with reactive pipelines.
minor comments (2)
- [Introduction] The roles of composer, arranger, and conductor are introduced with evocative names but lack a concise comparison table or diagram clarifying how their outputs interface with existing task-planning libraries.
- [Abstract] The project page URL is given but no statement is made about code or data release, which would be helpful for assessing reproducibility of the bimanual task results.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive review. The comments identify important areas where additional clarity and evidence are needed to support the central claims. We address each major comment below and will incorporate revisions to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract / Empirical studies] Abstract and empirical evaluation section: The claim that AgentChord 'substantially improves success rates and execution efficiency' is the load-bearing result, yet no baselines, quantitative metrics (e.g., success rate definition, time-to-completion), trial counts, or statistical controls are supplied. Without these, it is impossible to determine whether the gains exceed what exhaustive pre-planning of recoveries would achieve.
Authors: We agree that the empirical claims require more explicit documentation. In the revised manuscript we will expand the evaluation section to define success rate and time-to-completion precisely, report the exact number of trials per task, include direct comparisons against reactive detect-reason-recover baselines, and add statistical controls (means, standard deviations, and significance tests). These additions will allow readers to evaluate whether the observed improvements exceed those obtainable by exhaustive pre-enumeration alone. revision: yes
-
Referee: [AgentChord architecture] System overview and conductor description: The conductor is stated to trigger only pre-compiled transitions on monitor-detected deviations. The manuscript provides no analysis or experiment showing that the failures encountered during evaluation lie outside the recovery branches supplied by the arranger; if they overlap, the low-latency advantage is explained by pre-enumeration rather than anticipation, directly undermining the central contrast with reactive pipelines.
Authors: The arranger generates branches from predicted, context-aware failure modes rather than exhaustive enumeration. To address the concern directly, the revised version will include a dedicated analysis subsection that categorizes all observed failures into those covered by the pre-compiled branches versus those requiring on-the-fly reactive planning. This will quantify the anticipatory coverage and demonstrate that the latency reduction arises from proactive branch selection rather than complete pre-specification. revision: yes
Circularity Check
No circularity: new agentic framework with empirical validation only
full rationale
The paper presents AgentChord as a novel construction: a directed task graph built by a composer agent, augmented with pre-specified recovery branches by an arranger, and executed via low-latency monitors by a conductor. All claims rest on empirical success rates and efficiency metrics from long-horizon bimanual tasks. No equations, fitted parameters, self-citations, or uniqueness theorems appear in the provided text. The reported improvements are measured outcomes of the implemented system rather than quantities derived by construction from the inputs. This is a standard empirical systems paper with no load-bearing derivation chain.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Manipulation tasks can be effectively modeled as directed task graphs.
- domain assumption Potential failures can be anticipated sufficiently to allow pre-compilation of context-aware recovery branches.
invented entities (2)
-
Anticipatory recovery branches
no independent evidence
-
Composer-arranger-conductor agent choreography
no independent evidence
Forward citations
Cited by 3 Pith papers
-
BoostAPR: Boosting Automated Program Repair via Execution-Grounded Reinforcement Learning with Dual Reward Models
BoostAPR improves automated program repair by using execution-grounded RL with a sequence-level assessor and line-level credit allocator, reaching 40.7% on SWE-bench Verified and strong cross-language results.
-
BoostAPR: Boosting Automated Program Repair via Execution-Grounded Reinforcement Learning with Dual Reward Models
BoostAPR uses supervised fine-tuning on verified fixes, dual sequence- and line-level reward models from execution feedback, and PPO to reach 40.7% on SWE-bench Verified with strong cross-language results.
-
BoostAPR: Boosting Automated Program Repair via Execution-Grounded Reinforcement Learning with Dual Reward Models
BoostAPR boosts automated program repair by training a sequence-level assessor and line-level credit allocator from execution outcomes, then applying them in PPO to reach 40.7% on SWE-bench Verified.
Reference graph
Works this paper leans on
-
[1]
Muhammad Awais, Muzammal Naseer, Salman Khan, Rao Muhammad Anwer, Hisham Cholakkal, Mubarak Shah, Ming-Hsuan Yang, and Fahad Shahbaz Khan. Foundation models defining a new era in vision: a survey and outlook.IEEE Transactions on Pattern Analysis and Machine Intelligence, 2025
work page 2025
-
[2]
Towards a unified understanding of robot ma- nipulation: A comprehensive survey,
Shuanghao Bai, Wenxuan Song, Jiayi Chen, Yuheng Ji, Zhide Zhong, Jin Yang, Han Zhao, Wanqi Zhou, Wei Zhao, Zhe Li, et al. Towards a unified understanding of robot manipulation: A comprehensive survey.arXiv preprint arXiv:2510.10903, 2025
-
[3]
Trends and challenges in robot manipulation.Science, 364(6446):eaat8414, 2019
Aude Billard and Danica Kragic. Trends and challenges in robot manipulation.Science, 364(6446):eaat8414, 2019
work page 2019
-
[4]
GR00T N1: An Open Foundation Model for Generalist Humanoid Robots
Johan Bjorck, Fernando Casta ˜neda, Nikita Cherniadev, Xingye Da, Runyu Ding, Linxi Fan, Yu Fang, Dieter Fox, Fengyuan Hu, Spencer Huang, et al. Gr00t n1: An open foundation model for generalist humanoid robots.arXiv preprint arXiv:2503.14734, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[5]
$\pi_0$: A Vision-Language-Action Flow Model for General Robot Control
Kevin Black, Noah Brown, Danny Driess, Adnan Es- mail, Michael Equi, Chelsea Finn, Niccolo Fusai, Lachy Groom, Karol Hausman, Brian Ichter, et al. Pi0: A vision-language-action flow model for general robot con- trol.arXiv preprint arXiv:2410.24164, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[6]
SAM 3: Segment Anything with Concepts
Nicolas Carion, Laura Gustafson, Yuan-Ting Hu, Shoub- hik Debnath, Ronghang Hu, Didac Suris, Chaitanya Ryali, Kalyan Vasudev Alwala, Haitham Khedr, Andrew Huang, et al. Sam 3: Segment anything with concepts. arXiv preprint arXiv:2511.16719, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[7]
Keeping a clear separation between goals and plans
Costin Caval, Amal El Fallah Seghrouchni, and Patrick Taillibert. Keeping a clear separation between goals and plans. InInternational Workshop on Engineering Multi- Agent Systems, pages 15–39. Springer, 2014
work page 2014
-
[8]
Tianxing Chen, Zanxin Chen, Baijun Chen, Zijian Cai, Yibin Liu, Zixuan Li, Qiwei Liang, Xianliang Lin, Yi- heng Ge, Zhenyu Gu, et al. Robotwin 2.0: A scalable data generator and benchmark with strong domain random- ization for robust bimanual robotic manipulation.arXiv preprint arXiv:2506.18088, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[9]
Racer: Rich language-guided failure recovery policies for imitation learning
Yinpei Dai, Jayjun Lee, Nima Fazeli, and Joyce Chai. Racer: Rich language-guided failure recovery policies for imitation learning. In2025 IEEE International Conference on Robotics and Automation (ICRA), pages 15657–15664. IEEE, 2025
work page 2025
-
[10]
EmbodiChain Developers. Embodichain: An end-to-end, gpu-accelerated, and modular platform for building gen- eralized embodied intelligence, November 2025. URL https://github.com/DexForce/EmbodiChain
work page 2025
-
[11]
Thomas G Dietterich. Hierarchical reinforcement learn- ing with the maxq value function decomposition.Journal of artificial intelligence research, 13:227–303, 2000
work page 2000
-
[12]
Vision-language models as success detectors.arXiv preprint arXiv:2303.07280, 2023
Yuqing Du, Ksenia Konyushkova, Misha Denil, Akhil Raju, Jessica Landon, Felix Hill, Nando De Freitas, and Serkan Cabi. Vision-language models as success detectors.arXiv preprint arXiv:2303.07280, 2023
-
[13]
arXiv preprint arXiv:2410.00371 , year=
Jiafei Duan, Wilbert Pumacay, Nishanth Kumar, Yi Ru Wang, Shulin Tian, Wentao Yuan, Ranjay Krishna, Dieter Fox, Ajay Mandlekar, and Yijie Guo. Aha: A vision-language-model for detecting and reasoning over failures in robotic manipulation.arXiv preprint arXiv:2410.00371, 2024
-
[14]
Jiafei Duan, Wentao Yuan, Wilbert Pumacay, Yi Ru Wang, Kiana Ehsani, Dieter Fox, and Ranjay Kr- ishna. Manipulate-anything: Automating real-world robots using vision-language models.arXiv preprint arXiv:2406.18915, 2024
-
[15]
Ramy ElMallah, Krish Chhajer, and Chi-Guhn Lee. Score the steps, not just the goal: Vlm-based subgoal evaluation for robotic manipulation.arXiv preprint arXiv:2509.19524, 2025
-
[16]
Bin Fang, Shidong Jia, Di Guo, Muhua Xu, Shuhuan Wen, and Fuchun Sun. Survey of imitation learning for robotic manipulation.International Journal of Intelligent Robotics and Applications, 3(4):362–369, 2019
work page 2019
-
[17]
Hao-Shu Fang, Chenxi Wang, Hongjie Fang, Minghao Gou, Jirong Liu, Hengxu Yan, Wenhai Liu, Yichen Xie, and Cewu Lu. Anygrasp: Robust and efficient grasp perception in spatial and temporal domains.IEEE Transactions on Robotics, 39(5):3929–3945, 2023
work page 2023
-
[18]
Roya Firoozi, Johnathan Tucker, Stephen Tian, Anirudha Majumdar, Jiankai Sun, Weiyu Liu, Yuke Zhu, Shuran Song, Ashish Kapoor, Karol Hausman, et al. Foundation models in robotics: Applications, challenges, and the future.The International Journal of Robotics Research, 44(5):701–739, 2025
work page 2025
-
[19]
Mobile aloha: Learning bimanual mobile manipulation using low-cost whole-body teleoperation
Zipeng Fu, Tony Z Zhao, and Chelsea Finn. Mobile aloha: Learning bimanual mobile manipulation using low-cost whole-body teleoperation. In8th Annual Con- ference on Robot Learning, 2024
work page 2024
-
[20]
Anytask: an automated task and data generation framework for advancing sim-to-real policy learning
Ran Gong, Xiaohan Zhang, Jinghuan Shang, Maria Vit- toria Minniti, Jigarkumar Patel, Valerio Pepe, Riedana Yan, Ahmet Gundogdu, Ivan Kapelyukh, Ali Abbas, et al. Anytask: an automated task and data generation framework for advancing sim-to-real policy learning. arXiv preprint arXiv:2512.17853, 2025
-
[21]
Gemini 3: Introducing the latest gemini ai model from google, 2025
Google. Gemini 3: Introducing the latest gemini ai model from google, 2025. URL https://blog.google/ products-and-platforms/products/gemini/gemini-3/
work page 2025
-
[22]
Aaron Grattafiori, Abhimanyu Dubey, Abhinav Jauhri, Abhinav Pandey, Abhishek Kadian, Ahmad Al-Dahle, Aiesha Letman, Akhil Mathur, Alan Schelten, Alex Vaughan, et al. The llama 3 herd of models.arXiv preprint arXiv:2407.21783, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[23]
Doremi: Grounding language model by detecting and recovering from plan-execution misalignment
Yanjiang Guo, Yen-Jen Wang, Lihan Zha, and Jianyu Chen. Doremi: Grounding language model by detecting and recovering from plan-execution misalignment. In 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 12124–12131. IEEE, 2024
work page 2024
-
[24]
Dong Han, Beni Mulyana, Vladimir Stankovic, and Samuel Cheng. A survey on deep reinforcement learning algorithms for robotic manipulation.Sensors, 23(7): 3762, 2023
work page 2023
-
[25]
Inner Monologue: Embodied Reasoning through Planning with Language Models
Wenlong Huang, Fei Xia, Ted Xiao, Harris Chan, Jacky Liang, Pete Florence, Andy Zeng, Jonathan Tompson, Igor Mordatch, Yevgen Chebotar, et al. Inner monologue: Embodied reasoning through planning with language models.arXiv preprint arXiv:2207.05608, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[26]
VoxPoser: Composable 3D Value Maps for Robotic Manipulation with Language Models
Wenlong Huang, Chen Wang, Ruohan Zhang, Yunzhu Li, Jiajun Wu, and Li Fei-Fei. V oxposer: Composable 3d value maps for robotic manipulation with language models.arXiv preprint arXiv:2307.05973, 2023
work page internal anchor Pith review arXiv 2023
-
[27]
Wenlong Huang, Chen Wang, Yunzhu Li, Ruohan Zhang, and Li Fei-Fei. Rekep: Spatio-temporal reasoning of relational keypoint constraints for robotic manipulation. arXiv preprint arXiv:2409.01652, 2024
-
[28]
Kento Kawaharazuka, Tatsuya Matsushima, Andrew Gambardella, Jiaxian Guo, Chris Paxton, and Andy Zeng. Real-world robot applications of foundation models: A review.Advanced Robotics, 38(18):1232–1254, 2024
work page 2024
-
[29]
Dieter Kraft. A software package for sequential quadratic programming.Forschungsbericht- Deutsche Forschungs- und Versuchsanstalt fur Luft- und Raumfahrt, 1988
work page 1988
-
[30]
What foundation models can bring for robot learning in manipulation: A survey
Dingzhe Li, Yixiang Jin, Yuhao Sun, Yong A, Hongze Yu, Jun Shi, Xiaoshuai Hao, Peng Hao, Huaping Liu, Xiang Li, et al. What foundation models can bring for robot learning in manipulation: A survey. The International Journal of Robotics Research, page 02783649251390579, 2024
work page 2024
-
[31]
Gaofeng Li, Ruize Wang, Peisen Xu, Qi Ye, and Jiming Chen. The developments and challenges toward dexter- ous and embodied robotic manipulation: A survey.IEEE Robotics & Automation Magazine, 2025
work page 2025
-
[32]
Code as Policies: Language Model Programs for Embodied Control
Jacky Liang, Wenlong Huang, Fei Xia, Peng Xu, Karol Hausman, Brian Ichter, Pete Florence, and Andy Zeng. Code as policies: Language model programs for embod- ied control.arXiv preprint arXiv:2209.07753, 2022
work page internal anchor Pith review arXiv 2022
-
[33]
Haowen Liu, Shaoxiong Yao, Haonan Chen, Jiawei Gao, Jiayuan Mao, Jia-Bin Huang, and Yilun Du. Sim- pact: Simulation-enabled action planning using vision- language models.arXiv preprint arXiv:2512.05955, 2025
-
[34]
Jiaming Liu, Chenxuan Li, Guanqun Wang, Lily Lee, Kaichen Zhou, Sixiang Chen, Chuyan Xiong, Jiaxin Ge, Renrui Zhang, and Shanghang Zhang. Self-corrected multimodal large language model for end-to-end robot manipulation.arXiv e-prints, pages arXiv–2405, 2024
work page 2024
-
[35]
Grounding dino: Marrying dino with grounded pre-training for open-set object detection
Shilong Liu, Zhaoyang Zeng, Tianhe Ren, Feng Li, Hao Zhang, Jie Yang, Qing Jiang, Chunyuan Li, Jianwei Yang, Hang Su, et al. Grounding dino: Marrying dino with grounded pre-training for open-set object detection. InEuropean conference on computer vision, pages 38–
-
[36]
RDT-1B: a Diffusion Foundation Model for Bimanual Manipulation
Songming Liu, Lingxuan Wu, Bangguo Li, Hengkai Tan, Huayu Chen, Zhengyi Wang, Ke Xu, Hang Su, and Jun Zhu. Rdt-1b: a diffusion foundation model for bimanual manipulation.arXiv preprint arXiv:2410.07864, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[37]
Zeyi Liu, Arpit Bahety, and Shuran Song. Reflect: Summarizing robot experiences for failure explanation and correction.arXiv preprint arXiv:2306.15724, 2023
-
[38]
arXiv preprint arXiv:2505.12224 , year=
Weifeng Lu, Minghao Ye, Zewei Ye, Ruihan Tao, Shuo Yang, and Bo Zhao. Robofac: A comprehensive frame- work for robotic failure analysis and correction.arXiv preprint arXiv:2505.12224, 2025
-
[39]
Matthew T Mason. Toward robotic manipulation.Annual Review of Control, Robotics, and Autonomous Systems, 1(1):1–28, 2018
work page 2018
-
[40]
Learning transferable visual models from natural lan- guage supervision
Alec Radford, Jong Wook Kim, Chris Hallacy, Aditya Ramesh, Gabriel Goh, Sandhini Agarwal, Girish Sastry, Amanda Askell, Pamela Mishkin, Jack Clark, et al. Learning transferable visual models from natural lan- guage supervision. InInternational conference on ma- chine learning, pages 8748–8763. PmLR, 2021
work page 2021
-
[41]
Emmanuel K Raptis, Athanasios Ch Kapoutsis, and Elias B Kosmatopoulos. Agentic llm-based robotic systems for real-world applications: a review on their agenticness and ethics.Frontiers in Robotics and AI, 12: 1605405, 2025
work page 2025
-
[42]
Aaditya Singh, Adam Fry, Adam Perelman, Adam Tart, Adi Ganesh, Ahmed El-Kishky, Aidan McLaughlin, Aiden Low, AJ Ostrow, Akhila Ananthram, et al. Openai gpt-5 system card.arXiv preprint arXiv:2601.03267, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[43]
Progprompt: Generating situated robot task plans using large language models
Ishika Singh, Valts Blukis, Arsalan Mousavian, Ankit Goyal, Danfei Xu, Jonathan Tremblay, Dieter Fox, Jesse Thomason, and Animesh Garg. Progprompt: Generating situated robot task plans using large language models. arXiv preprint arXiv:2209.11302, 2022
-
[44]
Zihao Wang, Shaofei Cai, Guanzhou Chen, Anji Liu, Xiaojian Ma, and Yitao Liang. Describe, explain, plan and select: Interactive planning with large language mod- els enables open-world multi-task agents.arXiv preprint arXiv:2302.01560, 2023
-
[45]
Foundationpose: Unified 6d pose estimation and tracking of novel objects
Bowen Wen, Wei Yang, Jan Kautz, and Stan Birchfield. Foundationpose: Unified 6d pose estimation and tracking of novel objects. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 17868–17879, 2024
work page 2024
-
[46]
Phoenix: A motion-based self-reflection framework for fine-grained robotic action correction
Wenke Xia, Ruoxuan Feng, Dong Wang, and Di Hu. Phoenix: A motion-based self-reflection framework for fine-grained robotic action correction. InProceedings of the Computer Vision and Pattern Recognition Confer- ence, pages 6981–6990, 2025
work page 2025
-
[47]
Yang Xiang, DY Sun, Wei Fan, and XG Gong. General- ized simulated annealing algorithm and its application to the thomson model.Physics Letters A, 233(3):216–220, 1997
work page 1997
-
[48]
Maniagent: An agentic framework for general robotic manipulation
Yi Yang, Kefan Gu, Yuqing Wen, Hebei Li, Yucheng Zhao, Tiancai Wang, and Xudong Liu. Maniagent: An agentic framework for general robotic manipulation. arXiv preprint arXiv:2510.11660, 2025
-
[49]
Yifan Yang, Zhixiang Duan, Tianshi Xie, Fuyu Cao, Pinxi Shen, Peili Song, Piaopiao Jin, Guokang Sun, Shaoqing Xu, Yangwei You, et al. Fpc-vla: A vision-language-action framework with a supervisor for failure prediction and correction.arXiv preprint arXiv:2509.04018, 2025
-
[50]
Multireact: Multimodal tools augmented reasoning-acting traces for embodied agent planning
Zhouliang Yu, Jie Fu, Yao Mu, Chenguang Wang, Lin Shao, and Yaodong Yang. Multireact: Multimodal tools augmented reasoning-acting traces for embodied agent planning. InICLR, 2024
work page 2024
-
[51]
Kun Zhang, Peng Yun, Jun Cen, Junhao Cai, Didi Zhu, Hangjie Yuan, Chao Zhao, Tao Feng, Michael Yu Wang, Qifeng Chen, et al. Generative artificial intelligence in robotic manipulation: A survey.arXiv preprint arXiv:2503.03464, 2025
-
[52]
Sim2real vla: Zero-shot generalization of synthesized skills to realistic manipu- lation
Runyi Zhao, Sheng Xu, Ruixing Jin, Yueci Deng, Yunxin Tai, Kui Jia, and Guiliang Liu. Sim2real vla: Zero-shot generalization of synthesized skills to realistic manipu- lation. InThe Fourteenth International Conference on Learning Representations, 2026
work page 2026
-
[53]
Ying Zheng, Lei Yao, Yuejiao Su, Yi Zhang, Yi Wang, Sicheng Zhao, Yiyi Zhang, and Lap-Pui Chau. A survey of embodied learning for object-centric robotic manipulation.Machine Intelligence Research, pages 1– 39, 2025
work page 2025
-
[54]
Zhi Zheng, Qian Feng, Hang Li, Alois Knoll, and Jianxiang Feng. Evaluating uncertainty-based failure detection for closed-loop llm planners.arXiv preprint arXiv:2406.00430, 2024
-
[55]
Enshen Zhou, Qi Su, Cheng Chi, Zhizheng Zhang, Zhongyuan Wang, Tiejun Huang, Lu Sheng, and He Wang. Code-as-monitor: Constraint-aware visual programming for reactive and proactive robotic failure detection. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 6919–6929, 2025
work page 2025
-
[56]
You only teach once: Learn one-shot bimanual robotic manipulation from video demonstrations, 2025
Huayi Zhou, Ruixiang Wang, Yunxin Tai, Yueci Deng, Guiliang Liu, and Kui Jia. You only teach once: Learn one-shot bimanual robotic manipulation from video demonstrations.arXiv preprint arXiv:2501.14208, 2025
-
[57]
Jihong Zhu, Andrea Cherubini, Claire Dune, David Navarro-Alarcon, Farshid Alambeigi, Dmitry Berenson, Fanny Ficuciello, Kensuke Harada, Jens Kober, Xiang Li, et al. Challenges and outlook in robotic manipulation of deformable objects.IEEE Robotics & Automation Magazine, 29(3):67–77, 2022. APPENDIXA HARDWARESYSTEM Dual-Arm Robot.In this paper, we focus on ...
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.