MuGen: Multi-Skill Generative Locomotion Controller for Humanoid Robots
Pith reviewed 2026-06-30 13:10 UTC · model grok-4.3
The pith
A humanoid robot learns to track and mimic unseen human motions by compressing motion data into a reusable latent space.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By training vector-quantized autoencoders with model-based reinforcement learning on hours of heterogeneous human performance data, MuGen creates a generative representation of locomotion; a student policy distilled from a teacher then tracks and mimics unseen human motions while enabling reuse of the latent space for other tasks, demonstrated across a diverse set of motions with accurate execution.
What carries the argument
Vector-quantized autoencoders (VQ-VAEs) trained with model-based reinforcement learning that compress human motion patterns into a discrete generative latent space.
If this is right
- The robot executes a diverse set of motions accurately when guided by example sequences.
- The latent space supports direct reuse for other locomotion tasks without full policy retraining.
- The distilled student policy transfers to physical humanoid hardware.
- Training on heterogeneous data yields generalization to novel motion inputs.
Where Pith is reading between the lines
- The same latent space might simplify high-level task planning by providing reusable motion primitives.
- Similar compression could apply to non-humanoid robots if the representation separates motion style from platform dynamics.
- Physical results would need to quantify how sim-to-real gaps affect tracking of unseen motions.
- The approach might reduce the data required for new skills if the latent codes already encode transferable patterns.
Load-bearing premise
The vector-quantized autoencoders trained with model-based reinforcement learning produce a generative representation that captures key patterns of human motion from heterogeneous data in a way that supports generalization to unseen motions on a physical humanoid.
What would settle it
A physical robot test in which the policy receives motion sequences drawn from outside the training distribution and shows large tracking errors compared with in-distribution motions would falsify the generalization claim.
Figures
read the original abstract
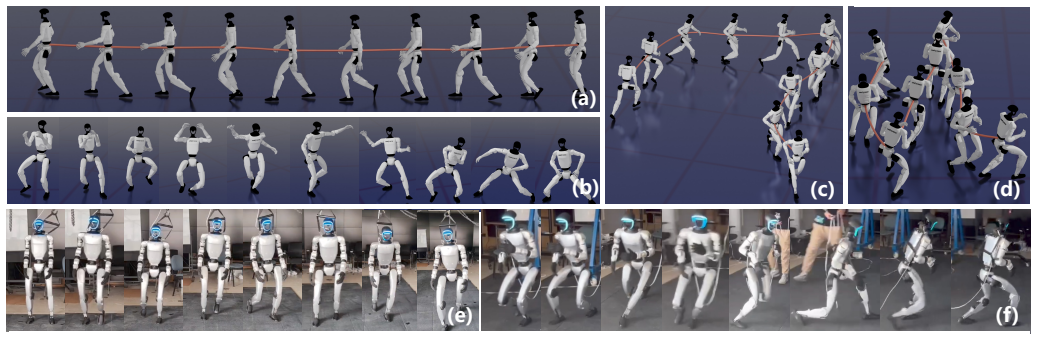
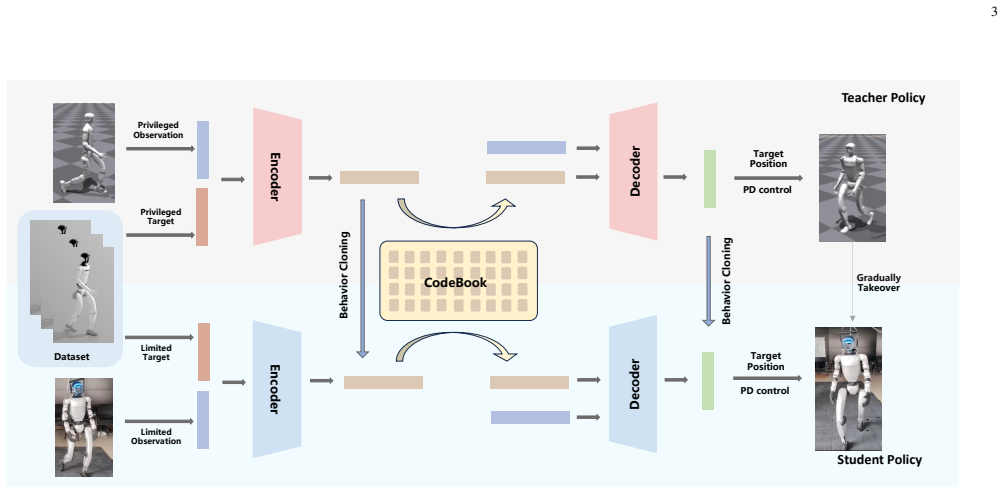
This paper presents MuGen, a data-driven framework for learning and deploying multi-skill locomotion on humanoid robots. MuGen enables a robot to perform expressive motions like humans under the guidance of example motion sequences. To achieve this, we employ vector-quantized autoencoders (VQ-VAEs) trained with model-based reinforcement learning, resulting in a generative representation of locomotion that captures key patterns of human motion from hours of heterogeneous human performance data. We employ a teacher-student learning framework and develop a new policy distillation strategy to enable a deployable student policy learning this efficient latent representation. This policy allows the robot to track and mimic unseen human motions and further enables the robot to reuse the learned latent space for other tasks. We demonstrate the effectiveness of our framework through a diverse set of motions and accurate execution.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents MuGen, a data-driven framework for multi-skill locomotion control on humanoid robots. It trains vector-quantized autoencoders (VQ-VAEs) via model-based reinforcement learning on hours of heterogeneous human motion data to obtain a generative latent representation, then applies a teacher-student distillation procedure to produce a deployable student policy. The resulting policy is claimed to track and mimic unseen human motions while also permitting reuse of the learned latent space for additional tasks, with effectiveness shown through a diverse set of motions and accurate execution on the robot.
Significance. If the central generalization claims hold with supporting quantitative evidence, the work would offer a practical route to expressive, multi-skill humanoid controllers learned from real human data that transfer to physical hardware and support downstream task reuse. The integration of VQ-VAE discretization with model-based RL and policy distillation addresses a relevant gap between motion capture data and deployable controllers.
major comments (2)
- [Abstract] Abstract: the central claim that the policy 'allows the robot to track and mimic unseen human motions' and 'enables the robot to reuse the learned latent space for other tasks' is presented without any quantitative tracking metrics, success rates, error statistics, ablation studies, or hardware validation details, rendering the generalization performance impossible to assess.
- [Abstract] Abstract: no definition is supplied for what constitutes an 'unseen' motion, no description of the data retargeting procedure, and no architecture or loss terms for the VQ-VAE or model-based RL training are given, all of which are load-bearing for verifying that the discrete codes capture transferable patterns rather than dataset-specific or simulation artifacts.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the abstract. We address the points below and will revise the abstract to better support the claims with key details while respecting length constraints.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the policy 'allows the robot to track and mimic unseen human motions' and 'enables the robot to reuse the learned latent space for other tasks' is presented without any quantitative tracking metrics, success rates, error statistics, ablation studies, or hardware validation details, rendering the generalization performance impossible to assess.
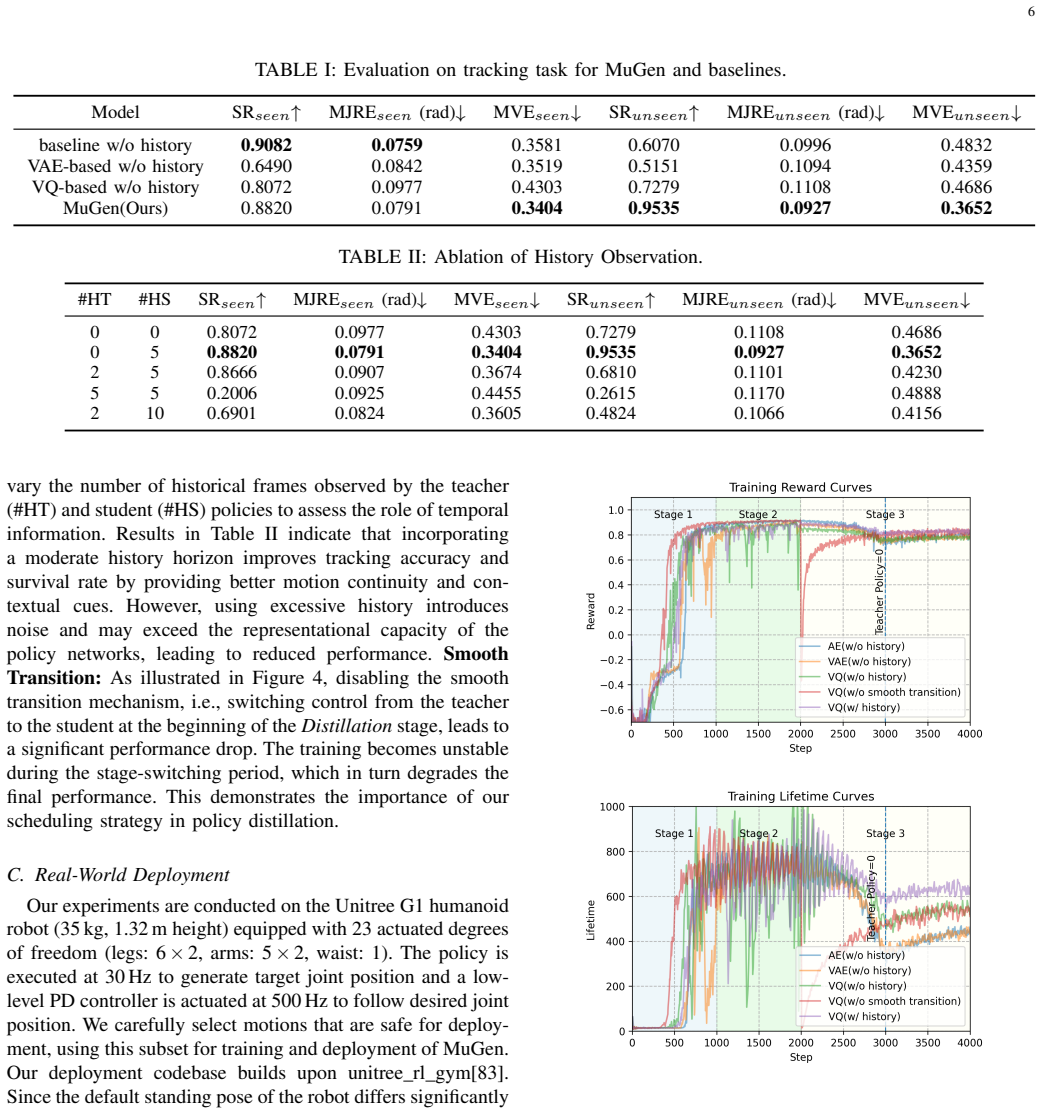
Authors: The abstract is a high-level summary; quantitative results (tracking errors, success rates on unseen motions, hardware execution accuracy) and ablations appear in Sections 5 and 6. We will revise the abstract to include concise quantitative highlights (e.g., average tracking error and success rate on held-out motions) to make the generalization claims more immediately assessable. revision: yes
-
Referee: [Abstract] Abstract: no definition is supplied for what constitutes an 'unseen' motion, no description of the data retargeting procedure, and no architecture or loss terms for the VQ-VAE or model-based RL training are given, all of which are load-bearing for verifying that the discrete codes capture transferable patterns rather than dataset-specific or simulation artifacts.
Authors: Space limits prevent full details in the abstract, but 'unseen' motions are defined as sequences from held-out subjects/styles (Section 4.1), retargeting uses standard SMPL-to-robot mapping (Section 3.2), and VQ-VAE architecture/losses plus model-based RL objective are specified in Section 3.3. We will add brief clarifications to the abstract (e.g., 'unseen motions from different performers') to address verifiability. revision: yes
Circularity Check
No circularity detected; claims rest on empirical training outcomes
full rationale
The provided abstract and description contain no equations, loss functions, or derivation steps. The central claim—that VQ-VAE latent codes trained via model-based RL on heterogeneous motion data enable tracking of unseen motions and latent-space reuse—is presented as an empirical result of the training and distillation process rather than a quantity derived from or equivalent to its own inputs by construction. No self-citations, ansatzes, or fitted-input-as-prediction patterns appear in the given text. The derivation chain is therefore self-contained against external benchmarks and receives the default non-circularity finding.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Adversarial motion priors make good substitutes for complex reward functions. 2022 ieee,
A. Escontrela, X. B. Peng, W. Yu, T. Zhang, A. Iscen, K. Goldberg, and P. Abbeel, “Adversarial motion priors make good substitutes for complex reward functions. 2022 ieee,” inInternational Conference on Intelligent Robots and Systems (IROS), vol. 2, 2022
2022
-
[2]
Amp in the wild: Learning robust, agile, natural legged locomotion skills,
Y . Wang, Z. Jiang, and J. Chen, “Amp in the wild: Learning robust, agile, natural legged locomotion skills,”arXiv preprint arXiv:2304.10888, 2023
-
[3]
Exbody2: Advanced expressive humanoid whole-body control,
M. Ji, X. Peng, F. Liu, J. Li, G. Yang, X. Cheng, and X. Wang, “Exbody2: Advanced expressive humanoid whole-body control,”arXiv preprint arXiv:2412.13196, 2024
-
[4]
Styleloco: Generative adversarial distillation for natural humanoid robot locomotion,
L. Ma, Z. Meng, T. Liu, Y . Li, R. Song, W. Zhang, and S. Huang, “Styleloco: Generative adversarial distillation for natural humanoid robot locomotion,”arXiv preprint arXiv:2503.15082, 2025
-
[5]
Controlvae: Model-based learning of generative controllers for physics-based characters,
H. Yao, Z. Song, B. Chen, and L. Liu, “Controlvae: Model-based learning of generative controllers for physics-based characters,”ACM Transactions on Graphics (TOG), vol. 41, no. 6, pp. 1–16, 2022
2022
-
[6]
Moconvq: Uni- fied physics-based motion control via scalable discrete representations,
H. Yao, Z. Song, Y . Zhou, T. Ao, B. Chen, and L. Liu, “Moconvq: Uni- fied physics-based motion control via scalable discrete representations,” ACM Transactions on Graphics (TOG), vol. 43, no. 4, pp. 1–21, 2024
2024
-
[7]
A reduction of imitation learning and structured prediction to no-regret online learning,
S. Ross, G. Gordon, and D. Bagnell, “A reduction of imitation learning and structured prediction to no-regret online learning,” inProceedings of the fourteenth international conference on artificial intelligence and statistics, 2011
2011
-
[8]
Development of wabot 1,
I. Kato, “Development of wabot 1,”Biomechanism, vol. 2, pp. 173–214, 1973
1973
-
[9]
Dynamic walk of a biped,
H. Miura and I. Shimoyama, “Dynamic walk of a biped,”IJRR, 1984
1984
-
[10]
The development of honda humanoid robot,
K. Hirai, M. Hirose, Y . Haikawa, and T. Takenaka, “The development of honda humanoid robot,” inProceedings. 1998 IEEE international conference on robotics and automation (Cat. No. 98CH36146), vol. 2. IEEE, 1998, pp. 1321–1326
1998
-
[11]
High speed whole body dynamic motion experiment with real time master-slave humanoid robot system,
Y . Ishiguro, K. Kojima, F. Sugai, S. Nozawa, Y . Kakiuchi, K. Okada, and M. Inaba, “High speed whole body dynamic motion experiment with real time master-slave humanoid robot system,” in2018 IEEE International Conference on Robotics and Automation (ICRA), 2018, pp. 5835–5841
2018
-
[12]
Dynamic locomotion synchronization of bipedal robot and human operator via bilateral feedback teleoperation,
J. Ramos and S. Kim, “Dynamic locomotion synchronization of bipedal robot and human operator via bilateral feedback teleoperation,”Science Robotics, vol. 4, no. 35, p. eaav4282, 2019
2019
-
[13]
On real- time whole-body human to humanoid motion transfer,
F.-J. Montecillo-Puente, M. N. Sreenivasa, and J.-P. Laumond, “On real- time whole-body human to humanoid motion transfer,” inInternational Conference on Informatics in Control, Automation and Robotics, 2010. [Online]. Available: https://api.semanticscholar.org/CorpusID:20676844
2010
-
[14]
Real-time imitation of human whole-body motions by humanoids,
J. Koenemann, F. Burget, and M. Bennewitz, “Real-time imitation of human whole-body motions by humanoids,” in2014 IEEE International Conference on Robotics and Automation (ICRA), 2014, pp. 2806–2812
2014
-
[15]
Dancing humanoid robots: Systematic use of osid to compute dynamically consistent movements following a motion capture pattern,
O. E. Ramos, N. Mansard, O. Stasse, C. Benazeth, S. Hak, and L. Saab, “Dancing humanoid robots: Systematic use of osid to compute dynamically consistent movements following a motion capture pattern,” IEEE Robotics and Automation Magazine, vol. 22, no. 4, pp. 16–26, 2015
2015
-
[16]
Hybrid zero dynamics of planar biped walkers,
E. R. Westervelt, J. W. Grizzle, and D. E. Koditschek, “Hybrid zero dynamics of planar biped walkers,”IEEE transactions on automatic control, vol. 48, no. 1, pp. 42–56, 2003
2003
-
[17]
Whole body humanoid control from human motion descriptors,
B. Dariush, M. Gienger, B. Jian, C. Goerick, and K. Fujimura, “Whole body humanoid control from human motion descriptors,” in2008 IEEE International Conference on Robotics and Automation. IEEE, 2008, pp. 2677–2684
2008
-
[18]
The 3d linear inverted pendulum mode: A simple modeling for a biped walking pattern generation,
S. Kajita, F. Kanehiro, K. Kaneko, K. Yokoi, and H. Hirukawa, “The 3d linear inverted pendulum mode: A simple modeling for a biped walking pattern generation,” inProceedings 2001 IEEE/RSJ International Con- ference on Intelligent Robots and Systems. Expanding the Societal Role of Robotics in the the Next Millennium (Cat. No. 01CH37180), vol. 1. IEEE, 2001...
2001
-
[19]
Anymal-a highly mobile and dynamic quadrupedal robot,
M. Hutter, C. Gehring, D. Jud, A. Lauber, C. D. Bellicoso, V . Tsounis, J. Hwangbo, K. Bodie, P. Fankhauser, M. Bloesch,et al., “Anymal-a highly mobile and dynamic quadrupedal robot,” inIROS, 2016
2016
-
[20]
Whole-body geometric retargeting for humanoid robots,
K. Darvish, Y . Tirupachuri, G. Romualdi, L. Rapetti, D. Ferigo, F. J. A. Chavez, and D. Pucci, “Whole-body geometric retargeting for humanoid robots,” in2019 IEEE-RAS 19th International Conference on Humanoid Robots (Humanoids), 2019, pp. 679–686
2019
-
[21]
A multimode teleoperation framework for humanoid loco-manipulation: An application for the icub robot,
L. Penco, N. Scianca, V . Modugno, L. Lanari, G. Oriolo, and S. Ivaldi, “A multimode teleoperation framework for humanoid loco-manipulation: An application for the icub robot,”IEEE Robotics and Automation Magazine, vol. 26, no. 4, pp. 73–82, 2019
2019
-
[22]
J. Ramos and S. Kim, “Dynamic locomotion synchronization of bipedal robot and human operator via bilateral feedback teleoperation,”Science Robotics, vol. 4, no. 35, p. eaav4282, 2019. [Online]. Available: https://www.science.org/doi/abs/10.1126/scirobotics.aav4282
-
[23]
Bilateral humanoid teleoperation system using whole-body exoskeleton cockpit tablis,
Y . Ishiguro, T. Makabe, Y . Nagamatsu, Y . Kojio, K. Kojima, F. Sugai, Y . Kakiuchi, K. Okada, and M. Inaba, “Bilateral humanoid teleoperation system using whole-body exoskeleton cockpit tablis,”IEEE Robotics and Automation Letters, vol. 5, no. 4, pp. 6419–6426, 2020
2020
-
[24]
Mixed reality teleoperation assistance for direct control of humanoids,
L. Penco, K. Momose, S. McCrory, D. Anderson, N. Kitchel, D. Calvert, and R. J. Griffin, “Mixed reality teleoperation assistance for direct control of humanoids,”IEEE Robotics and Automation Letters, vol. 9, no. 2, pp. 1937–1944, 2024
1937
-
[25]
Whole-body control of humanoid robots,
F. L. Moro and L. Sentis, “Whole-body control of humanoid robots,” Humanoid Robotics: A reference, Springer, Dordrecht, 2019
2019
-
[26]
Online non-linear centroidal mpc for humanoid robot locomotion with step adjustment,
G. Romualdi, S. Dafarra, G. L’Erario, I. Sorrentino, S. Traversaro, and D. Pucci, “Online non-linear centroidal mpc for humanoid robot locomotion with step adjustment,” in2022 International Conference on Robotics and Automation (ICRA). IEEE, 2022, pp. 10 412–10 419
2022
-
[27]
Mptc-modular passive tracking controller for stack of tasks based control frameworks,
J. Englsberger, A. Dietrich, G.-A. Mesesan, G. Garofalo, C. Ott, and A. O. Albu-Sch¨affer, “Mptc-modular passive tracking controller for stack of tasks based control frameworks,”16th Robotics: Science and Systems, RSS 2020, 2020
2020
-
[28]
Online non-linear centroidal mpc for humanoid robots payload carrying with contact-stable force parametrization,
M. Elobaid, G. Romualdi, G. Nava, L. Rapetti, H. A. O. Mohamed, and D. Pucci, “Online non-linear centroidal mpc for humanoid robots payload carrying with contact-stable force parametrization,” in2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023, pp. 12 233–12 239. 8
2023
-
[29]
The mit humanoid robot: Design, motion planning, and control for acrobatic behaviors,
M. Chignoli, D. Kim, E. Stanger-Jones, and S. Kim, “The mit humanoid robot: Design, motion planning, and control for acrobatic behaviors,” in 2020 IEEE-RAS 20th International Conference on Humanoid Robots (Humanoids). IEEE, 2021, pp. 1–8
2020
-
[30]
Synchronized human-humanoid motion imitation,
A. Dallard, M. Benallegue, F. Kanehiro, and A. Kheddar, “Synchronized human-humanoid motion imitation,”IEEE Robotics and Automation Letters, vol. 8, no. 7, pp. 4155–4162, 2023
2023
-
[31]
Learning agile robotic locomotion skills by imitating animals,
X. B. Peng, E. Coumans, T. Zhang, T.-W. Lee, J. Tan, and S. Levine, “Learning agile robotic locomotion skills by imitating animals,” Apr. 2020
2020
-
[32]
RMA: Rapid Motor Adaptation for Legged Robots
A. Kumar, Z. Fu, D. Pathak, and J. Malik, “Rma: Rapid motor adaptation for legged robots,”arXiv preprint arXiv:2107.04034, 2021
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[33]
Minimizing energy con- sumption leads to the emergence of gaits in legged robots,
Z. Fu, A. Kumar, J. Malik, and D. Pathak, “Minimizing energy con- sumption leads to the emergence of gaits in legged robots,”Conference on Robot Learning (CoRL), 2021
2021
-
[34]
Blind bipedal stair traversal via sim-to-real reinforcement learning,
J. Siekmann, K. Green, J. Warila, A. Fern, and J. Hurst, “Blind bipedal stair traversal via sim-to-real reinforcement learning,”arXiv preprint arXiv:2105.08328, 2021
-
[35]
Robot parkour learning,
Z. Zhuang, Z. Fu, J. Wang, C. Atkeson, S. Schwertfeger, C. Finn, and H. Zhao, “Robot parkour learning,” inConference on Robot Learning (CoRL), 2023
2023
-
[36]
Extreme parkour with legged robots,
X. Cheng, K. Shi, A. Agarwal, and D. Pathak, “Extreme parkour with legged robots,”arXiv preprint arXiv:2309.14341, 2023
-
[37]
Beamdojo: Learning agile humanoid locomotion on sparse footholds,
H. Wang, Z. Wang, J. Ren, Q. Ben, T. Huang, W. Zhang, and J. Pang, “Beamdojo: Learning agile humanoid locomotion on sparse footholds,” arXiv preprint arXiv:2502.10363, 2025
-
[38]
Legs as manipulator: Pushing quadrupedal agility beyond locomotion,
X. Cheng, A. Kumar, and D. Pathak, “Legs as manipulator: Pushing quadrupedal agility beyond locomotion,” in2023 IEEE International Conference on Robotics and Automation (ICRA), 2023
2023
-
[39]
Learn- ing whole-body manipulation for quadrupedal robot,
S. Jeon, M. Jung, S. Choi, B. Kim, and J. Hwangbo, “Learn- ing whole-body manipulation for quadrupedal robot,”arXiv preprint arXiv:2308.16820, 2023
-
[40]
Curiosity-driven learning of joint locomotion and manipulation tasks,
C. Schwarke, V . Klemm, M. Van der Boon, M. Bjelonic, and M. Hutter, “Curiosity-driven learning of joint locomotion and manipulation tasks,” inProceedings of The 7th Conference on Robot Learning, vol. 229. PMLR, 2023, pp. 2594–2610
2023
-
[41]
Dribblebot: Dynamic legged manipulation in the wild,
Y . Ji, G. B. Margolis, and P. Agrawal, “Dribblebot: Dynamic legged manipulation in the wild,”arXiv preprint arXiv:2304.01159, 2023
-
[42]
Deepmimic: Example-guided deep reinforcement learning of physics-based character skills,
X. B. Peng, P. Abbeel, S. Levine, and M. Van de Panne, “Deepmimic: Example-guided deep reinforcement learning of physics-based character skills,”ACM Transactions On Graphics (TOG), pp. 1–14, 2018
2018
-
[43]
Amp: Adversarial motion priors for stylized physics-based character control,
X. B. Peng, Z. Ma, P. Abbeel, S. Levine, and A. Kanazawa, “Amp: Adversarial motion priors for stylized physics-based character control,” ACM Trans. Graph., vol. 40, no. 4, July 2021. [Online]. Available: http://doi.acm.org/10.1145/3450626.3459670
-
[44]
Ase: Large- scale reusable adversarial skill embeddings for physically simulated characters,
X. B. Peng, Y . Guo, L. Halper, S. Levine, and S. Fidler, “Ase: Large- scale reusable adversarial skill embeddings for physically simulated characters,”ACM Trans. Graph., vol. 41, no. 4, July 2022
2022
-
[45]
Calm: Conditional adversarial latent models for directable virtual characters,
C. Tessler, Y . Kasten, Y . Guo, S. Mannor, G. Chechik, and X. B. Peng, “Calm: Conditional adversarial latent models for directable virtual characters,” inACM SIGGRAPH 2023 Conference Proceedings, ser. SIGGRAPH ’23. New York, NY , USA: Association for Computing Machinery, 2023. [Online]. Available: https://doi.org/10.1145/3588432. 3591541
-
[46]
Reinforcement learning for robust parameterized locomo- tion control of bipedal robots,
Z. Li, X. Cheng, X. B. Peng, P. Abbeel, S. Levine, G. Berseth, and K. Sreenath, “Reinforcement learning for robust parameterized locomo- tion control of bipedal robots,” in2021 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2021, pp. 2811–2817
2021
-
[47]
Reinforcement learning for versatile, dynamic, and robust bipedal locomotion control,
Z. Li, X. B. Peng, P. Abbeel, S. Levine, G. Berseth, and K. Sreenath, “Reinforcement learning for versatile, dynamic, and robust bipedal locomotion control,”arXiv preprint arXiv:2401.16889, 2024
-
[48]
Real-world humanoid locomotion with reinforcement learning,
I. Radosavovic, T. Xiao, B. Zhang, T. Darrell, J. Malik, and K. Sreenath, “Real-world humanoid locomotion with reinforcement learning,”arXiv:2303.03381, 2023
-
[49]
Homie: Humanoid loco-manipulation with isomorphic exoskeleton cockpit,
Q. Ben, F. Jia, J. Zeng, J. Dong, D. Lin, and J. Pang, “Homie: Humanoid loco-manipulation with isomorphic exoskeleton cockpit,”arXiv preprint arXiv:2502.13013, 2025
-
[50]
Robust and versatile bipedal jumping control through multi-task rein- forcement learning,
Z. Li, X. B. Peng, P. Abbeel, S. Levine, G. Berseth, and K. Sreenath, “Robust and versatile bipedal jumping control through multi-task rein- forcement learning,”arXiv preprint arXiv:2302.09450, 2023
-
[51]
Learning humanoid standing-up control across diverse postures,
T. Huang, J. Ren, H. Wang, Z. Wang, Q. Ben, M. Wen, X. Chen, J. Li, and J. Pang, “Learning humanoid standing-up control across diverse postures,”arXiv preprint arXiv:2502.08378, 2025
-
[52]
Simgan: Hybrid simulator identification for domain adaptation via adversarial reinforcement learning,
Y . Jiang, T. Zhang, D. Ho, Y . Bai, C. K. Liu, S. Levine, and J. Tan, “Simgan: Hybrid simulator identification for domain adaptation via adversarial reinforcement learning,” in2021 IEEE International Con- ference on Robotics and Automation (ICRA), 2021, pp. 2884–2890
2021
-
[53]
Asap: Aligning simulation and real-world physics for learning agile humanoid whole-body skills,
T. He, J. Gao, W. Xiao, Y . Zhang, Z. Wang, J. Wang, Z. Luo, G. He, N. Sobanbab, C. Pan,et al., “Asap: Aligning simulation and real-world physics for learning agile humanoid whole-body skills,”arXiv preprint arXiv:2502.01143, 2025
-
[54]
Legged locomotion in challenging terrains using egocentric vision,
A. Agarwal, A. Kumar, J. Malik, and D. Pathak, “Legged locomotion in challenging terrains using egocentric vision,” inConference on Robot Learning. PMLR, 2023, pp. 403–415
2023
-
[55]
Neural volumetric memory for visual locomotion control,
R. Yang, G. Yang, and X. Wang, “Neural volumetric memory for visual locomotion control,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023, pp. 1430–1440
2023
-
[56]
Learning vision-based bipedal locomotion for challenging terrain,
H. Duan, B. Pandit, M. S. Gadde, B. J. van Marum, J. Dao, C. Kim, and A. Fern, “Learning vision-based bipedal locomotion for challenging terrain,”arXiv preprint arXiv:2309.14594, 2023
-
[57]
Character controllers using motion vaes,
H. Y . Ling, F. Zinno, G. Cheng, and M. Van De Panne, “Character controllers using motion vaes,”ACM Transactions on Graphics (TOG), vol. 39, no. 4, pp. 40–1, 2020
2020
-
[58]
Physics-based character controllers using conditional vaes,
J. Won, D. Gopinath, and J. Hodgins, “Physics-based character controllers using conditional vaes,”ACM Trans. Graph., vol. 41, no. 4, July 2022. [Online]. Available: https://doi.org/10.1145/3528223. 3530067
-
[59]
Generative adversarial imitation learning,
J. Ho and S. Ermon, “Generative adversarial imitation learning,”Ad- vances in neural information processing systems, vol. 29, 2016
2016
-
[60]
Amp: Adversarial motion priors for stylized physics-based character control,
X. B. Peng, Z. Ma, P. Abbeel, S. Levine, and A. Kanazawa, “Amp: Adversarial motion priors for stylized physics-based character control,” ACM Transactions on Graphics (ToG), vol. 40, no. 4, pp. 1–20, 2021
2021
-
[61]
Neural categorical priors for physics-based character control,
Q. Zhu, H. Zhang, M. Lan, and L. Han, “Neural categorical priors for physics-based character control,” 2023. [Online]. Available: https://arxiv.org/abs/2308.07200
-
[62]
Masked- mimic: Unified physics-based character control through masked motion inpainting,
C. Tessler, Y . Guo, O. Nabati, G. Chechik, and X. B. Peng, “Masked- mimic: Unified physics-based character control through masked motion inpainting,”ACM Transactions on Graphics (TOG), 2024
2024
-
[63]
Opt-mimic: Imitation of optimized trajectories for dynamic quadruped behaviors,
Y . Fuchioka, Z. Xie, and M. Van de Panne, “Opt-mimic: Imitation of optimized trajectories for dynamic quadruped behaviors,” in2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023, pp. 5092–5098
2023
-
[64]
Diffuseloco: Real-time legged locomotion control with diffusion from offline datasets,
X. Huang, Y . Chi, R. Wang, Z. Li, X. B. Peng, S. Shao, B. Nikolic, and K. Sreenath, “Diffuseloco: Real-time legged locomotion control with diffusion from offline datasets,” 2024. [Online]. Available: https://arxiv.org/abs/2404.19264
-
[65]
An efficient model-based approach on learning agile motor skills without reinforcement,
H. Shi, T. Li, Q. Zhu, J. Sheng, L. Han, and M. Q. H. Meng, “An efficient model-based approach on learning agile motor skills without reinforcement,” 2024. [Online]. Available: https: //arxiv.org/abs/2403.01962
-
[66]
Learning Multi-Modal Whole-Body Control for Real-World Humanoid Robots
P. Dugar, A. Shrestha, F. Yu, B. van Marum, and A. Fern, “Learning multi-modal whole-body control for real-world humanoid robots,” 2024. [Online]. Available: https://arxiv.org/abs/2408.07295
work page internal anchor Pith review Pith/arXiv arXiv 2024
- [67]
-
[68]
Omnih2o: Universal and dexterous human-to-humanoid whole-body teleoperation and learning,
T. He, Z. Luo, X. He, W. Xiao, C. Zhang, W. Zhang, K. Kitani, C. Liu, and G. Shi, “Omnih2o: Universal and dexterous human-to-humanoid whole-body teleoperation and learning,” 2024. [Online]. Available: https://arxiv.org/abs/2406.08858
-
[69]
Learning human-to-humanoid real-time whole-body teleoperation,
T. He, Z. Luo, W. Xiao, C. Zhang, K. Kitani, C. Liu, and G. Shi, “Learning human-to-humanoid real-time whole-body teleoperation,” in arXiv, 2024
2024
-
[70]
Hover: Versatile neural whole-body controller for humanoid robots,
T. He, W. Xiao, T. Lin, Z. Luo, Z. Xu, Z. Jiang, C. Liu, G. Shi, X. Wang, L. Fan, and Y . Zhu, “Hover: Versatile neural whole-body controller for humanoid robots,”arXiv preprint arXiv:2410.21229, 2024
-
[71]
Humanplus: Humanoid shadowing and imitation from humans,
Z. Fu, Q. Zhao, Q. Wu, G. Wetzstein, and C. Finn, “Humanplus: Humanoid shadowing and imitation from humans,” 2024. [Online]. Available: https://arxiv.org/abs/2406.10454
-
[72]
Humanoid locomotion as next token prediction,
I. Radosavovic, B. Zhang, B. Shi, J. Rajasegaran, S. Kamat, T. Dar- rell, K. Sreenath, and J. Malik, “Humanoid locomotion as next token prediction,”arXiv:2402.19469, 2024
-
[73]
Universal humanoid motion representations for physics- based control,
Z. Luo, J. Cao, J. Merel, A. Winkler, J. Huang, K. M. Kitani, and W. Xu, “Universal humanoid motion representations for physics- based control,” inThe Twelfth International Conference on Learning Representations, 2024. [Online]. Available: https://openreview.net/ forum?id=OrOd8PxOO2
2024
-
[74]
Strategy and skill learning for physics- based table tennis animation,
J. Wang, J. Hodgins, and J. Won, “Strategy and skill learning for physics- based table tennis animation,” inACM SIGGRAPH 2024 Conference Papers, 2024, pp. 1–11
2024
-
[75]
Robot motion diffusion model: Motion generation for robotic characters,
A. Serifi, R. Grandia, E. Knoop, M. Gross, and M. B ¨acher, “Robot motion diffusion model: Motion generation for robotic characters,” in SIGGRAPH Asia 2024 Conference Papers, ser. SA ’24. New York, 9 NY , USA: Association for Computing Machinery, 2024. [Online]. Available: https://doi.org/10.1145/3680528.3687626
-
[76]
Learning agile robotic locomotion skills by imitating animals,
X. B. Peng, E. Coumans, T. Zhang, T.-W. E. Lee, J. Tan, and S. Levine, “Learning agile robotic locomotion skills by imitating animals,” in Robotics: Science and Systems, 07 2020
2020
-
[77]
Neural discrete representation learning,
A. van den Oord, O. Vinyals, and K. Kavukcuoglu, “Neural discrete representation learning,” inProceedings of the 31st International Con- ference on Neural Information Processing Systems, ser. NIPS’17. Red Hook, NY , USA: Curran Associates Inc., 2017, p. 6309–6318
2017
-
[78]
Learn to teach: Sample-efficient privileged learning for humanoid locomotion over diverse terrains,
F. Wu, X. Nal, J. Jang, W. Zhu, Z. Gu, A. Wu, and Y . Zhao, “Learn to teach: Sample-efficient privileged learning for humanoid locomotion over diverse terrains,” 2025. [Online]. Available: https: //arxiv.org/abs/2402.06783
-
[79]
Cts: Concurrent teacher-student reinforcement learning for legged locomotion,
H. Wang, H. Luo, W. Zhang, and H. Chen, “Cts: Concurrent teacher-student reinforcement learning for legged locomotion,” 2024. [Online]. Available: https://arxiv.org/abs/2405.10830
-
[80]
Isaac Gym: High Performance GPU-Based Physics Simulation For Robot Learning
V . Makoviychuk, L. Wawrzyniak, Y . Guo, M. Lu, K. Storey, M. Macklin, D. Hoeller, N. Rudin, A. Allshire, A. Handa,et al., “Isaac gym: High performance gpu-based physics simulation for robot learning,”arXiv preprint arXiv:2108.10470, 2021
work page internal anchor Pith review Pith/arXiv arXiv 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.