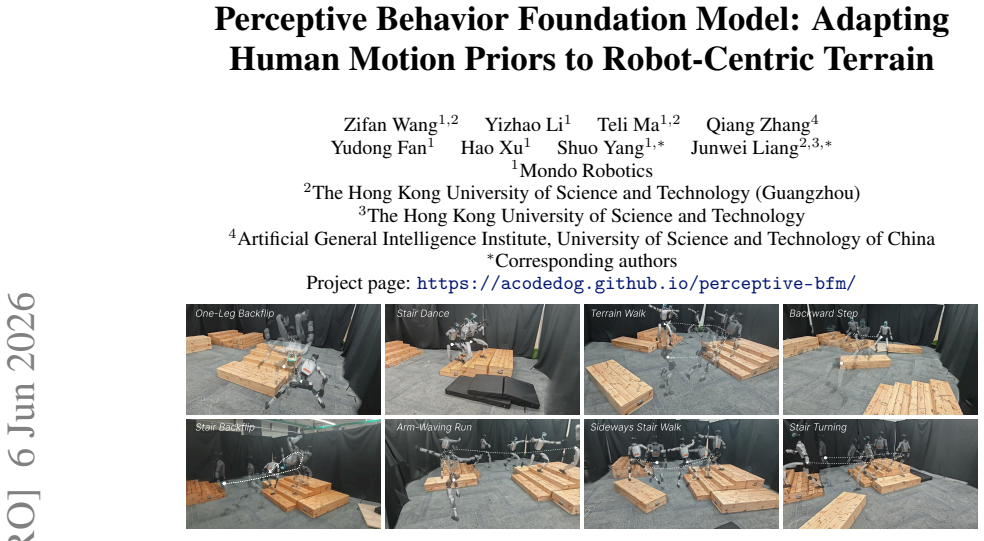
Perceptive Behavior Foundation Model: Adapting Human Motion Priors to Robot-Centric Terrain
Pith reviewed 2026-06-27 19:47 UTC · model grok-4.3
The pith
Human motion priors are adapted to a robot's local terrain by synthesizing conformal references from raw clips and transferring them to a student policy via residual corrections.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
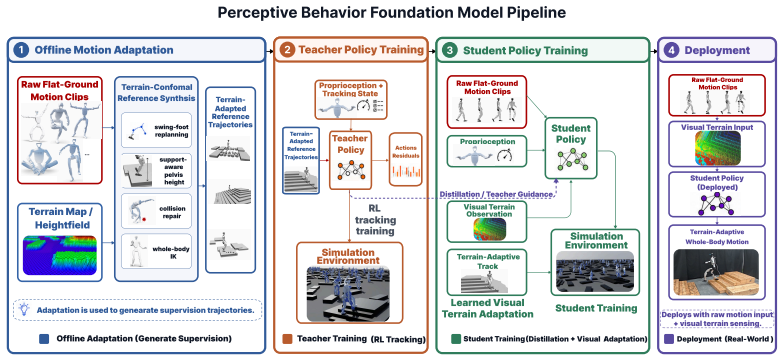
Perceptive BFM grounds human motion priors in robot-centric perception while preserving raw kinematic motion references as the behavioral interface. TCRS converts locomotion-oriented human motion clips into terrain-consistent references through contact-aware foothold construction, foot-geometry-aware swing optimization, support-aware root reconstruction, collision repair, and multi-point inverse kinematics. A blind adapted-reference teacher is trained and its terrain-conformal behavior is transferred to a deployed raw-reference student through target-frame action alignment in an identity-gated Transformer tracker whose terrain features enter through residual pathways initialized to preserve
What carries the argument
terrain-conformal reference synthesis (TCRS), the pipeline that converts human motion clips into terrain-consistent references via contact-aware foothold construction, foot-geometry-aware swing optimization, support-aware root reconstruction, collision repair, and multi-point inverse kinematics; paired with residual pathways in an identity-gated Transformer tracker that add local terrain corrections only when required.
If this is right
- Raw kinematic references remain usable as the behavioral interface even when human and robot environments differ.
- Local terrain observations adapt contacts, posture, and timing without retraining the core motion prior.
- Terrain features enter the policy only through residuals, so corrections occur only when the raw reference is incompatible.
- Scalable terrain supervision is obtained from automated synthesis rather than hand-designed or terrain-specific motion data.
Where Pith is reading between the lines
- The residual-pathway design could allow perception modules to be added to existing motion trackers without full retraining.
- If TCRS generalizes beyond locomotion clips, the same separation might support non-walking behaviors such as manipulation or climbing.
- The teacher-student split separates the problem of reference synthesis from the problem of learning terrain corrections, which could be tested independently.
Load-bearing premise
That TCRS can reliably turn human locomotion clips into terrain-consistent references without artifacts that break policy training or cause real-world instability.
What would settle it
Run the trained student policy on terrain where the TCRS pipeline produces incorrect footholds or swing trajectories and check whether tracking fails or the robot falls.
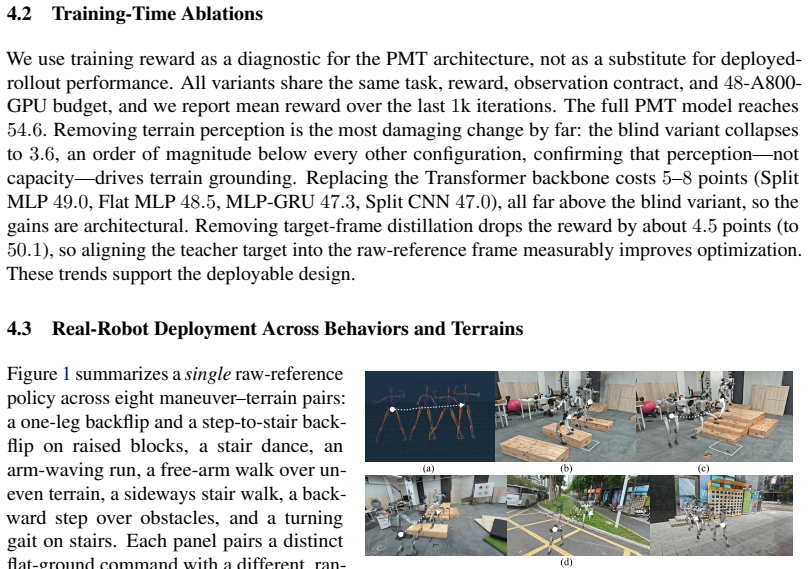
Figures
read the original abstract
Humanoid behavior foundation models aim to acquire reusable whole-body control policies from broad human motion priors, enabling a single controller to produce diverse and expressive behaviors. However, existing motion-centric foundation policies largely assume that the reference motion is already physically compatible with the robot's surroundings. This assumption breaks when the demonstrator, operator, and robot inhabit different environments: a human motion may specify the intended behavior, but not the footholds, clearance, body height, or contact timing required by the robot's local terrain. We introduce \emph{Perceptive Behavior Foundation Model} (Perceptive BFM), a terrain-aware humanoid control framework that grounds human motion priors in robot-centric perception. The model preserves raw kinematic motion references as the behavioral interface, while using local terrain observations to adapt contacts, posture, and timing. To provide scalable terrain supervision, we develop \emph{terrain-conformal reference synthesis} (TCRS), which converts locomotion-oriented human motion clips into terrain-consistent references through contact-aware foothold construction, foot-geometry-aware swing optimization, support-aware root reconstruction, collision repair, and multi-point inverse kinematics. We then train a blind adapted-reference teacher and transfer its terrain-conformal behavior to a deployed raw-reference student through target-frame action alignment. The student is an identity-gated Transformer tracker whose terrain features enter through residual pathways initialized to preserve the motion-tracking prior and trained to produce local corrections only when needed.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces the Perceptive Behavior Foundation Model (Perceptive BFM), a terrain-aware humanoid control framework that grounds human motion priors in robot-centric perception. It preserves raw kinematic references as the behavioral interface and uses local terrain observations to adapt contacts, posture, and timing. The key technical contribution is terrain-conformal reference synthesis (TCRS), a five-stage pipeline (contact-aware foothold construction, foot-geometry-aware swing optimization, support-aware root reconstruction, collision repair, multi-point inverse kinematics) that converts locomotion-oriented human motion clips into terrain-consistent references. A blind adapted-reference teacher is trained and its behavior transferred to a deployed raw-reference student (an identity-gated Transformer tracker) via target-frame action alignment, with terrain features entering through residual pathways initialized to preserve the motion-tracking prior.
Significance. If the TCRS pipeline reliably produces artifact-free references and the teacher-student transfer succeeds, the work would enable scalable reuse of human motion data for expressive humanoid behaviors on varied real-world terrain without requiring terrain-compatible demonstrations, addressing a key limitation of existing motion-centric foundation policies.
major comments (2)
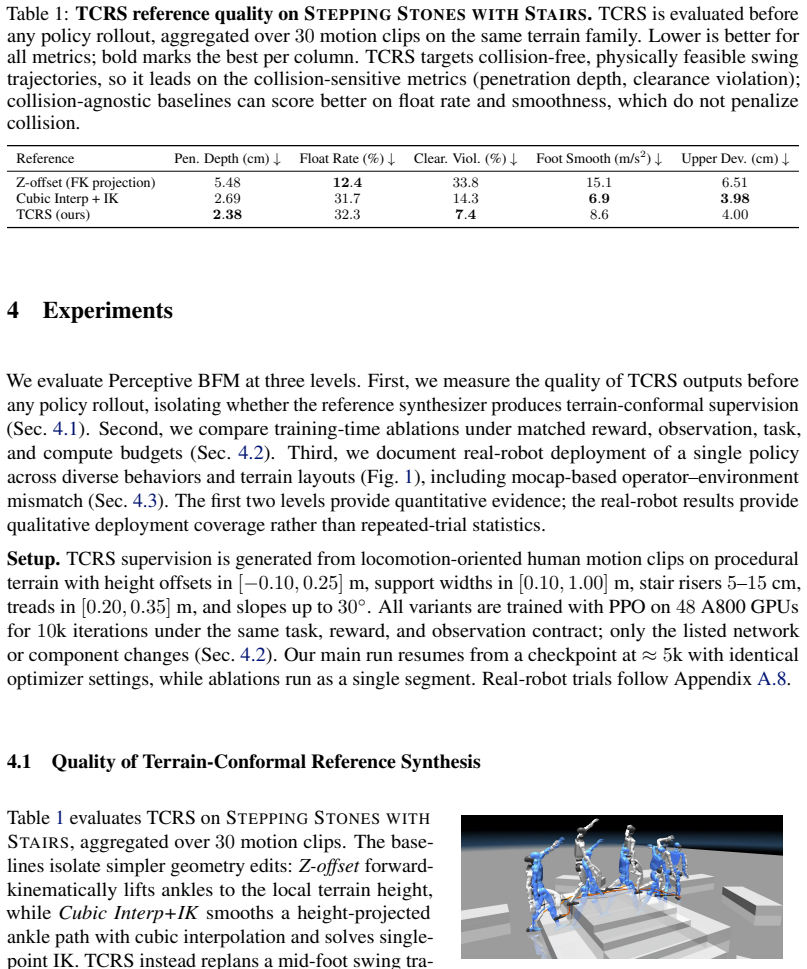
- [TCRS pipeline description] The TCRS description (abstract and method) claims the five-stage process produces terrain-consistent references faithful enough for stable teacher training and student transfer, but supplies no quantitative validation such as contact timing error, foot clearance statistics, kinematic deviation metrics, or success rates on downstream policy training. This is load-bearing for the central claim, as any systematic distortion in timing, posture, or clearance would undermine the raw-reference student's ability to recover intended behavior via residual corrections.
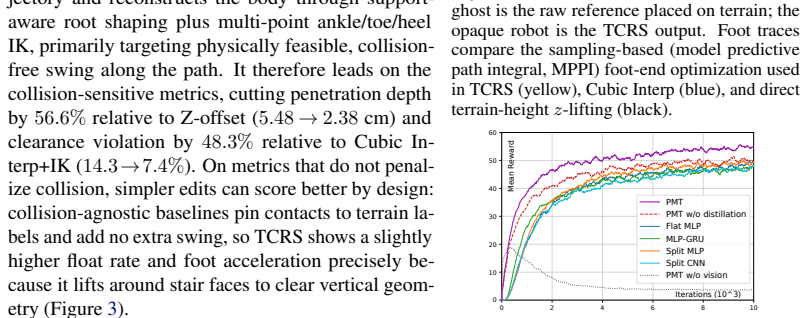
- [Experiments / Evaluation] No ablation studies or quantitative results are reported to isolate the contribution of the residual terrain pathways, the target-frame action alignment transfer, or the identity-gated Transformer architecture. Without these, it is not possible to verify whether the student produces local corrections only when needed or whether the framework outperforms baselines that assume terrain-compatible references.
minor comments (2)
- [Method] Clarify the exact definition of 'target-frame action alignment' and how it differs from standard imitation or distillation losses used in prior motion-tracking work.
- [Student architecture] The abstract states the student is 'trained to produce local corrections only when needed,' but the initialization and training details for the residual pathways should be expanded for reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting the need for quantitative validation of TCRS and ablations on the transfer components. We address each major comment below and will revise the manuscript accordingly to strengthen the central claims.
read point-by-point responses
-
Referee: [TCRS pipeline description] The TCRS description (abstract and method) claims the five-stage process produces terrain-consistent references faithful enough for stable teacher training and student transfer, but supplies no quantitative validation such as contact timing error, foot clearance statistics, kinematic deviation metrics, or success rates on downstream policy training. This is load-bearing for the central claim, as any systematic distortion in timing, posture, or clearance would undermine the raw-reference student's ability to recover intended behavior via residual corrections.
Authors: We agree that explicit quantitative validation of TCRS is essential to support the claim that the synthesized references are sufficiently faithful. The current manuscript emphasizes the pipeline design and qualitative demonstrations but does not report the requested metrics. In the revised version we will add a new evaluation subsection that computes and reports contact timing error (mean absolute deviation in stance/swing phases), foot clearance statistics (minimum and average clearance over swing trajectories), kinematic deviation metrics (joint angle and root position RMSE relative to original human references), and downstream success rates (percentage of stable teacher training episodes and student transfer success across terrain types). These will be evaluated on a held-out set of locomotion clips adapted to procedurally generated terrains. revision: yes
-
Referee: [Experiments / Evaluation] No ablation studies or quantitative results are reported to isolate the contribution of the residual terrain pathways, the target-frame action alignment transfer, or the identity-gated Transformer architecture. Without these, it is not possible to verify whether the student produces local corrections only when needed or whether the framework outperforms baselines that assume terrain-compatible references.
Authors: We concur that isolating the contributions of the residual terrain pathways, target-frame action alignment, and identity-gated Transformer is necessary to substantiate the design choices. The present manuscript presents the integrated framework and overall results but omits these controlled ablations. In revision we will expand the experiments section with quantitative ablations: (1) variants with/without residual pathways (measuring terrain adaptation error and tracking fidelity), (2) alternative transfer methods versus target-frame action alignment (reporting policy success rate and correction magnitude), and (3) comparisons against non-gated Transformer baselines. All ablations will include performance on both simulated and real-robot terrain tasks to demonstrate when and how local corrections are applied. revision: yes
Circularity Check
No significant circularity; derivation is self-contained method description
full rationale
The provided abstract and framework description introduce Perceptive BFM and TCRS as a sequence of processing stages (contact-aware foothold construction, swing optimization, root reconstruction, collision repair, multi-point IK) followed by teacher-student transfer via target-frame action alignment. No equations, fitted parameters renamed as predictions, self-definitional loops, or load-bearing self-citations are present that would reduce any claimed output to its inputs by construction. The central claim rests on the described pipeline producing usable references, which is an empirical precondition rather than a circular reduction. This matches the default case of a non-circular proposal of a new control architecture.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Human motion priors remain a valid behavioral interface even after terrain-induced modifications to contacts and timing.
invented entities (1)
-
terrain-conformal reference
no independent evidence
Reference graph
Works this paper leans on
-
[1]
T. He, Z. Luo, X. He, W. Xiao, C. Zhang, W. Zhang, K. M. Kitani, C. Liu, and G. Shi. OmniH2O: Universal and dexterous human-to-humanoid whole-body teleoperation and learning. InProceedings of the 8th Conference on Robot Learning, volume 270 ofProceedings of Machine Learning Research, pages 1516–1540. PMLR, 2025. URL https://proceedings. mlr.press/v270/he25b.html
2025
-
[2]
Cheng, Y
X. Cheng, Y . Ji, J. Chen, R. Yang, G. Yang, and X. Wang. Expressive whole-body control for humanoid robots. InProceedings of Robotics: Science and Systems, Delft, Netherlands, July
-
[3]
doi:10.15607/RSS.2024.XX.107
-
[4]
T. He, W. Xiao, T. Lin, Z. Luo, Z. Xu, Z. Jiang, J. Kautz, C. Liu, G. Shi, X. Wang, L. Fan, and Y . Zhu. HOVER: Versatile neural whole-body controller for humanoid robots.arXiv preprint arXiv:2410.21229, 2024. doi:10.48550/arXiv.2410.21229
-
[5]
GR00T N1: An Open Foundation Model for Generalist Humanoid Robots
J. Bjorck, F. Castañeda, N. Cherniadev, X. Da, R. Ding, L. Fan, Y . Fang, D. Fox, F. Hu, S. Huang, J. Jang, Z. Jiang, J. Kautz, K. Kundalia, L. Lao, Z. Li, Z. Lin, K. Lin, G. Liu, E. Llontop, L. Magne, A. Mandlekar, A. Narayan, S. Nasiriany, S. Reed, Y . L. Tan, G. Wang, Z. Wang, J. Wang, Q. Wang, J. Xiang, Y . Xie, Y . Xu, Z. Xu, S. Ye, Z. Yu, A. Zhang, ...
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2503.14734 2025
-
[6]
W. Zeng, S. Lu, K. Yin, X. Niu, M. Dai, J. Wang, and J. Pang. Behavior foundation model for humanoid robots.arXiv preprint arXiv:2509.13780, 2025. doi:10.48550/arXiv.2509.13780
-
[7]
Y . Li, Z. Luo, T. Zhang, C. Dai, A. Kanervisto, A. Tirinzoni, H. Weng, K. Kitani, M. Guzek, A. Touati, A. Lazaric, M. Pirotta, and G. Shi. BFM-Zero: A promptable behavioral founda- tion model for humanoid control using unsupervised reinforcement learning.arXiv preprint arXiv:2511.04131, 2025. doi:10.48550/arXiv.2511.04131
-
[8]
Z. Luo, Y . Yuan, T. Wang, C. Li, S. Chen, F. Castaneda, Z.-A. Cao, J. Li, D. Minor, Q. Ben, X. Da, L. Fan, and Y . Zhu. SONIC: Supersizing motion tracking for natural humanoid whole- body control.arXiv preprint arXiv:2511.07820, 2025. doi:10.48550/arXiv.2511.07820
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2511.07820 2025
-
[9]
S. Zhu, Z. Zhuang, M. Zhao, K.-Y . Lee, and H. Zhao. Hiking in the wild: A scalable perceptive parkour framework for humanoids.arXiv preprint arXiv:2601.07718, 2026. doi:10.48550/ arXiv.2601.07718
arXiv 2026
-
[10]
Z. Zhuang, S. Zhu, M. Zhao, and H. Zhao. Deep whole-body parkour.arXiv preprint arXiv:2601.07701, 2026. doi:10.48550/arXiv.2601.07701
-
[11]
Z. Wu, X. Huang, L. Yang, Y . Zhang, K. Sreenath, X. Chen, P. Abbeel, R. Duan, A. Kanazawa, C. Sferrazza, G. Shi, and C. K. Liu. Perceptive humanoid parkour: Chaining dynamic human skills via motion matching.arXiv preprint arXiv:2602.15827, 2026. doi:10.48550/arXiv.2602. 15827
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2602 2026
-
[12]
X. B. Peng, P. Abbeel, S. Levine, and M. van de Panne. Deepmimic: Example-guided deep reinforcement learning of physics-based character skills.ACM Transactions on Graphics, 37 (4):143, 2018. doi:10.1145/3197517.3201311
-
[13]
X. B. Peng, Z. Ma, P. Abbeel, S. Levine, and A. Kanazawa. AMP: Adversarial motion priors for stylized physics-based character control.ACM Transactions on Graphics, 40(4):1–20, 2021. doi:10.1145/3450626.3459670
-
[14]
T. He, Z. Luo, W. Xiao, C. Zhang, K. Kitani, C. Liu, and G. Shi. Learning human-to-humanoid real-time whole-body teleoperation. In2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 8944–8951, 2024. doi:10.1109/IROS58592.2024.10801984. 9
-
[15]
Z. Luo, J. Cao, A. Winkler, K. Kitani, and W. Xu. Perpetual humanoid control for real-time simulated avatars. InProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), pages 10895–10904, 2023. doi:10.1109/ICCV51070.2023.01000
-
[16]
Z. Luo, J. Cao, J. Merel, A. Winkler, J. Huang, K. Kitani, and W. Xu. Universal humanoid motion representations for physics-based control. InInternational Conference on Learning Representations, 2024. URLhttps://openreview.net/forum?id=OrOd8PxOO2
2024
-
[17]
Z. Fu, Q. Zhao, Q. Wu, G. Wetzstein, and C. Finn. HumanPlus: Humanoid shadowing and imitation from humans. InProceedings of the 8th Conference on Robot Learning, volume 270 ofProceedings of Machine Learning Research, pages 2828–2844. PMLR, 2025. URL https://proceedings.mlr.press/v270/fu25a.html
2025
-
[18]
Y . Ma, H. Yu, J. Xie, C. Lv, Q. Luo, C. Zhang, Y . Yin, B. Xing, X. Ren, and D. Zheng. Robust and generalized humanoid motion tracking.arXiv preprint arXiv:2601.23080, 2026. doi:10.48550/arXiv.2601.23080
-
[19]
Y . Wang, S. Zhu, P. Zhi, Y . Li, J. Li, Y .-L. Li, Y . Xiao, X. Wang, B. Jia, and S. Huang. OmniXtreme: Breaking the generality barrier in high-dynamic humanoid control.arXiv preprint arXiv:2602.23843, 2026. doi:10.48550/arXiv.2602.23843
-
[20]
Agarwal, A
A. Agarwal, A. Kumar, J. Malik, and D. Pathak. Legged locomotion in challenging terrains using egocentric vision. InProceedings of the 6th Conference on Robot Learning, volume 205 ofProceedings of Machine Learning Research, pages 403–415. PMLR, 2023. URL https://proceedings.mlr.press/v205/agarwal23a.html
2023
-
[21]
Zhuang, Z
Z. Zhuang, Z. Fu, J. Wang, C. G. Atkeson, S. Schwertfeger, C. Finn, and H. Zhao. Robot parkour learning. InProceedings of the 7th Conference on Robot Learning, volume 229 ofProceedings of Machine Learning Research, pages 73–92. PMLR, 2023. URL https: //proceedings.mlr.press/v229/zhuang23a.html
2023
-
[22]
nvblox: GPU - accelerated incremental signed distance field mapping,
X. Cheng, K. Shi, A. Agarwal, and D. Pathak. Extreme parkour with legged robots. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 11443–11450, 2024. doi:10.1109/ICRA57147.2024.10610200
- [23]
-
[24]
doi:10.48550/arXiv.2406.10759
-
[25]
H. Wang, Z. Wang, J. Ren, Q. Ben, T. Huang, W. Zhang, and J. Pang. BeamDojo: Learning agile humanoid locomotion on sparse footholds.arXiv preprint arXiv:2502.10363, 2025. doi:10.48550/arXiv.2502.10363
-
[26]
W. Sun, Y . Su, L. Huang, A. Zhang, D. Wei, M. San, D. Tian, E. Cao, F. Yan, E. Xie, and Z. Xie. Now you see that: Learning end-to-end humanoid locomotion from raw pixels.arXiv preprint arXiv:2602.06382, 2026. doi:10.48550/arXiv.2602.06382
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2602.06382 2026
-
[27]
Z. Wang, T. Ma, Y . Jia, X. Yang, J. Zhou, W. Ouyang, Q. Zhang, and J. Liang. Omni-perception: Omnidirectional collision avoidance for legged locomotion in dynamic environments.arXiv preprint arXiv:2505.19214, 2025. doi:10.48550/arXiv.2505.19214
-
[28]
Z. Wang, X. Yang, J. Zhao, J. Zhou, T. Ma, Z. Gao, A. Ajoudani, and J. Liang. End-to-end humanoid robot safe and comfortable locomotion policy.arXiv preprint arXiv:2508.07611,
-
[29]
doi:10.48550/arXiv.2508.07611
-
[30]
Learning Whole-Body Humanoid Locomotion via Motion Generation and Motion Tracking
Z. Zhang, K. Wen, M. Xu, J. He, C. Li, T. Miki, C. Schwarke, C. Zhang, X. B. Peng, and M. Hutter. Learning whole-body humanoid locomotion via motion generation and motion tracking.arXiv preprint arXiv:2604.17335, 2026. doi:10.48550/arXiv.2604.17335. 10
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2604.17335 2026
-
[31]
W. D. Compton, Z. Olkin, and A. D. Ames. Terrain consistent reference-guided RL for humanoid navigation autonomy.arXiv preprint arXiv:2605.15517, 2026. doi:10.48550/arXiv.2605.15517
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2605.15517 2026
-
[32]
Y . Li, P. Zhi, Y . Wang, T. Liu, S. Yan, W. Liu, X. Wang, B. Jia, and S. Huang. OmniTrack: General motion tracking via physics-consistent reference.arXiv preprint arXiv:2602.23832,
-
[33]
doi:10.48550/arXiv.2602.23832
-
[34]
S. Choi, M. K. X. J. Pan, and J. Kim. Nonparametric motion retargeting for humanoid robots on shared latent space. InRobotics: Science and Systems, 2020. doi:10.15607/RSS.2020.XVI.071
-
[35]
R. Villegas, J. Yang, D. Ceylan, and H. Lee. Neural kinematic networks for unsupervised motion retargetting. InProceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 8639–8648, 2018. doi:10.1109/CVPR.2018.00901
-
[36]
L. Yang, X. Huang, Z. Wu, A. Kanazawa, P. Abbeel, C. Sferrazza, C. K. Liu, R. Duan, and G. Shi. OmniRetarget: Interaction-preserving data generation for humanoid whole-body loco- manipulation and scene interaction.arXiv preprint arXiv:2509.26633, 2025. doi:10.48550/ arXiv.2509.26633
Pith/arXiv arXiv 2025
-
[37]
Dantec, M
E. Dantec, M. Naveau, P. Fernbach, N. A. Villa, G. Saurel, O. Stasse, M. Taix, and N. Mansard. Whole-body model predictive control for biped locomotion on a torque-controlled humanoid robot.IEEE-RAS International Conference on Humanoid Robots (Humanoids), pages 638–644,
-
[38]
doi:10.1109/Humanoids53995.2022.10000129
-
[39]
Pajon, S
A. Pajon, S. Caron, G. De Magistris, S. Miossec, and A. Kheddar. Walking on gravel with soft soles using linear inverted pendulum tracking and reaction force distribution. In2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids), pages 432–437,
-
[40]
doi:10.1109/HUMANOIDS.2017.8246909
-
[41]
J. Lee, J. Hwangbo, L. Wellhausen, V . Koltun, and M. Hutter. Learning quadrupedal locomotion over challenging terrain.Science Robotics, 5(47):eabc5986, 2020. doi:10.1126/scirobotics. abc5986
-
[42]
A. Kumar, Z. Fu, D. Pathak, and J. Malik. RMA: Rapid motor adaptation for legged robots. In Robotics: Science and Systems, 2021. doi:10.15607/RSS.2021.XVII.011
-
[43]
T. Miki, J. Lee, J. Hwangbo, L. Wellhausen, V . Koltun, and M. Hutter. Learning robust perceptive locomotion for quadrupedal robots in the wild.Science Robotics, 7(62):eabk2822,
-
[44]
doi:10.1126/scirobotics.abk2822
-
[45]
T. He, J. Gao, W. Xiao, Y . Zhang, Z. Wang, J. Wang, Z. Luo, G. He, N. Sobanbab, C. Pan, Z. Yi, G. Qu, K. Kitani, J. Hodgins, L. J. Fan, Y . Zhu, C. Liu, and G. Shi. ASAP: Aligning simulation and real-world physics for learning agile humanoid whole-body skills.arXiv preprint arXiv:2502.01143, 2025. doi:10.48550/arXiv.2502.01143
-
[46]
T. Silver, K. Allen, J. Tenenbaum, and L. P. Kaelbling. Residual policy learning.arXiv preprint arXiv:1812.06298, 2018. doi:10.48550/arXiv.1812.06298
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.1812.06298 2018
-
[47]
T. Johannink, S. Bahl, A. Nair, J. Luo, A. Kumar, M. Loskyll, J. A. Ojea, E. Solowjow, and S. Levine. Residual reinforcement learning for robot control.IEEE International Conference on Robotics and Automation (ICRA), pages 6023–6029, 2019. doi:10.1109/ICRA.2019.8794127
-
[48]
S. Zhao, Y . Ze, Y . Wang, C. K. Liu, P. Abbeel, G. Shi, and R. Duan. ResMimic: From general motion tracking to humanoid whole-body loco-manipulation via residual learning.arXiv preprint arXiv:2510.05070, 2025. doi:10.48550/arXiv.2510.05070
-
[49]
Z. Wang, Y . Jia, L. Shi, H. Wang, H. Zhao, X. Li, J. Zhou, J. Ma, and G. Zhou. Arm- constrained curriculum learning for loco-manipulation of a wheel-legged robot. In2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 10770– 10776. IEEE, 2024. doi:10.1109/IROS58592.2024.10802062. 11 A Additional Implementation Details A....
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.