ASPIRE: Agentic /Skills Discovery for Robotics
Pith reviewed 2026-07-02 18:02 UTC · model grok-4.3
The pith
A continual learning loop lets robots autonomously write, diagnose, and reuse control programs across tasks and robot bodies.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
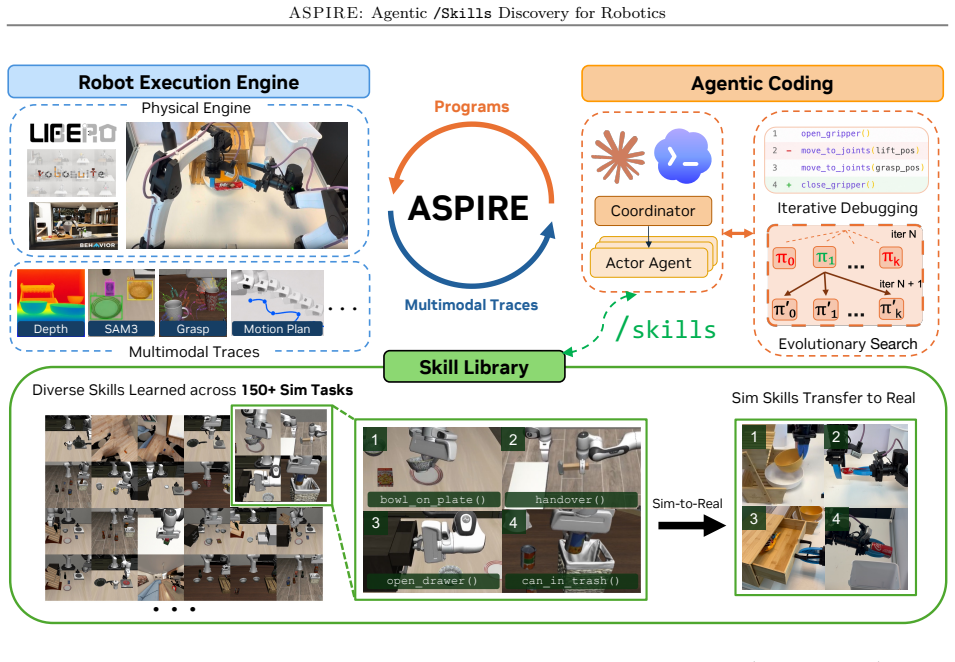
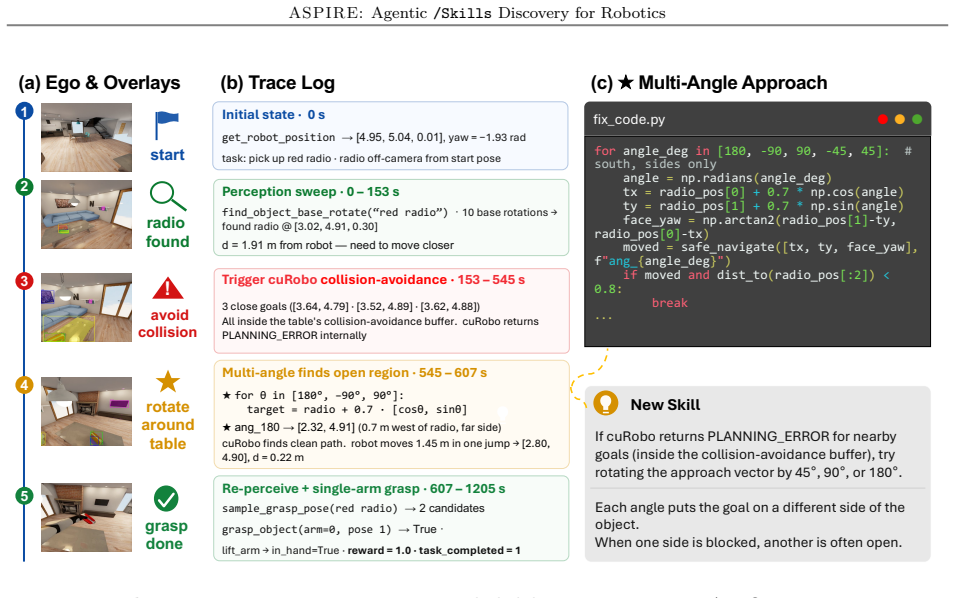
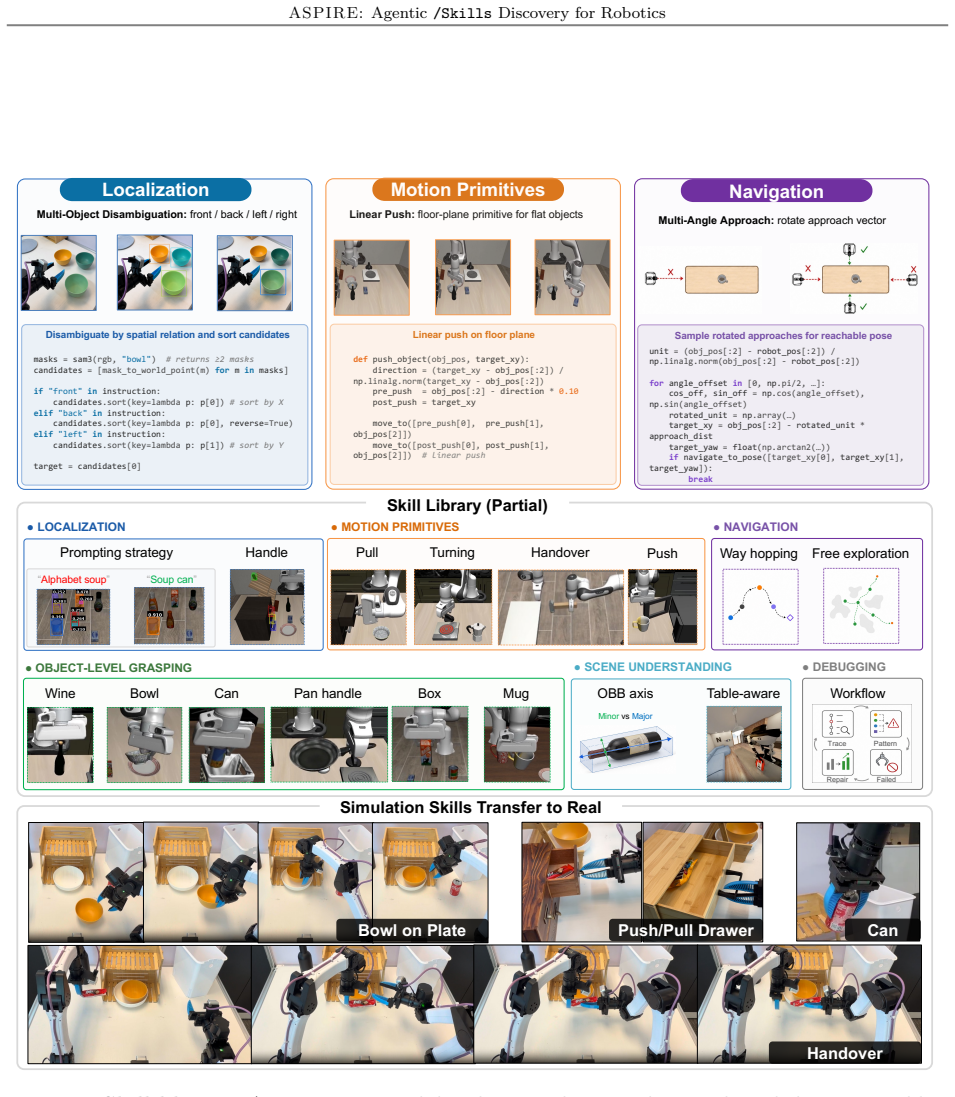
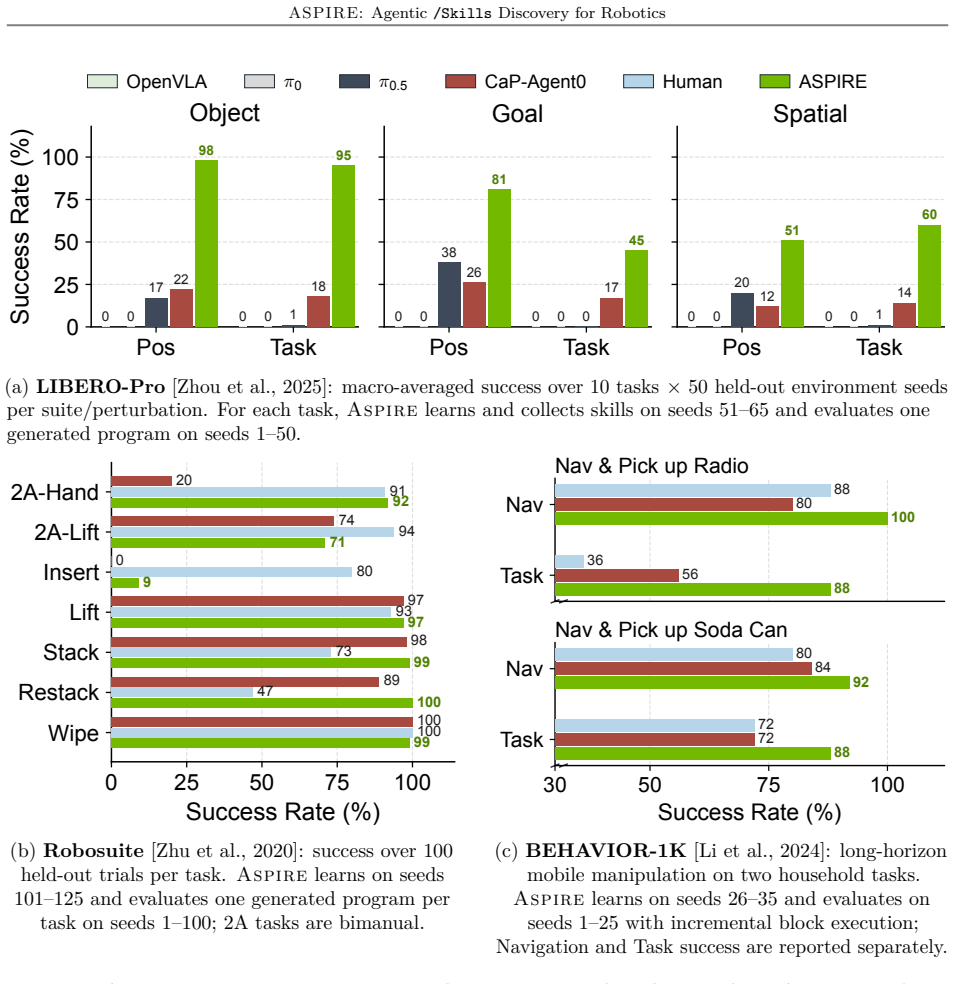
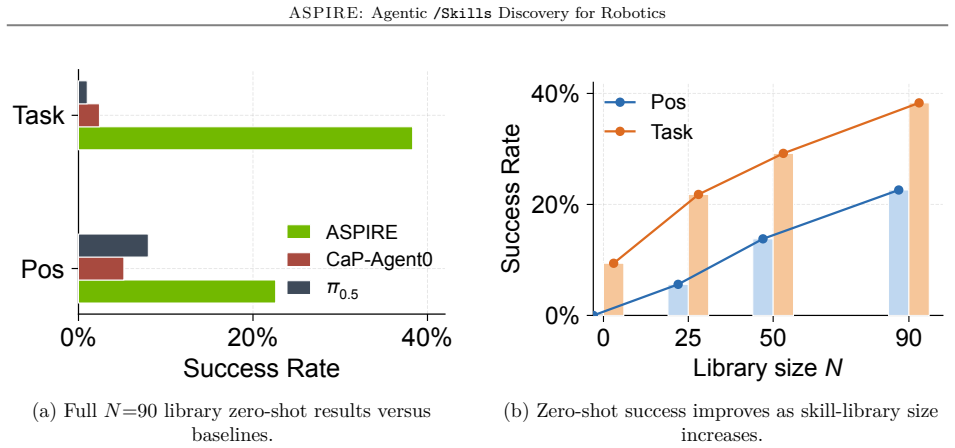
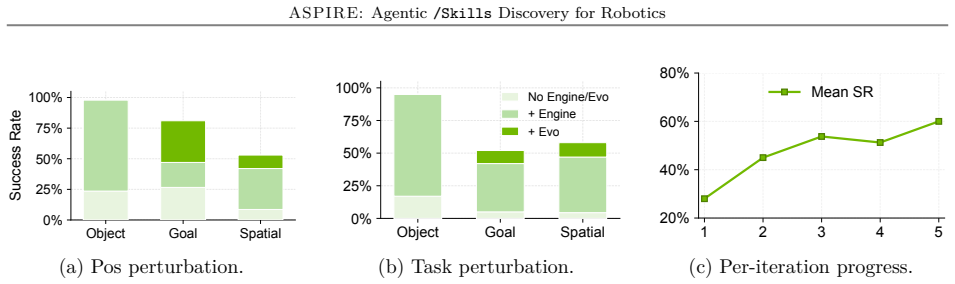
ASPIRE runs three components in a loop: a closed-loop execution engine that records multimodal traces for autonomous diagnosis and repair, a growing library that stores validated programs as reusable skills, and evolutionary search that proposes new task sequences and code variants. The resulting library transfers across tasks, simulation-to-real settings, and robot embodiments while outperforming prior methods on perturbed manipulation, bimanual handover, and long-horizon household benchmarks, including 31 percent zero-shot success on unseen long tasks where baselines reach only 4 percent.
What carries the argument
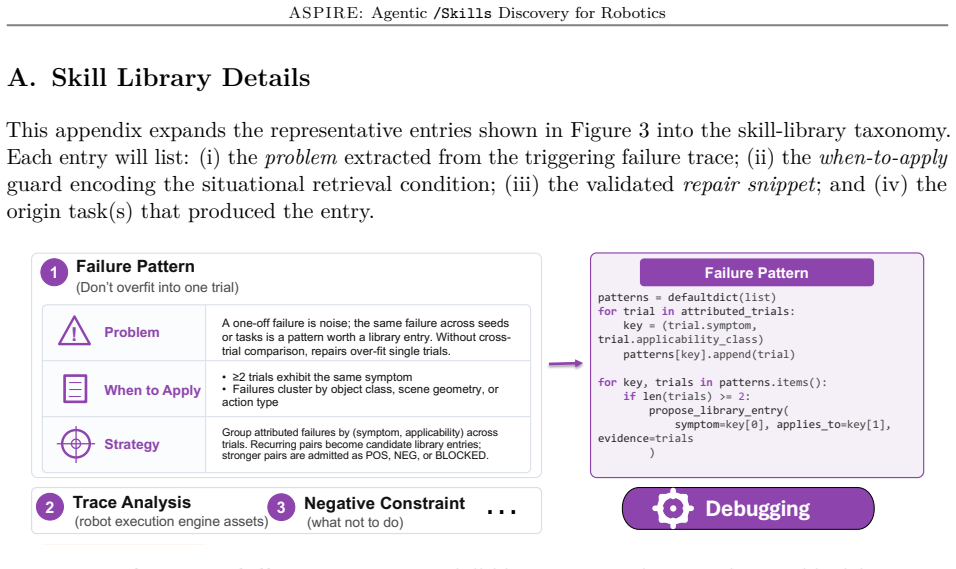
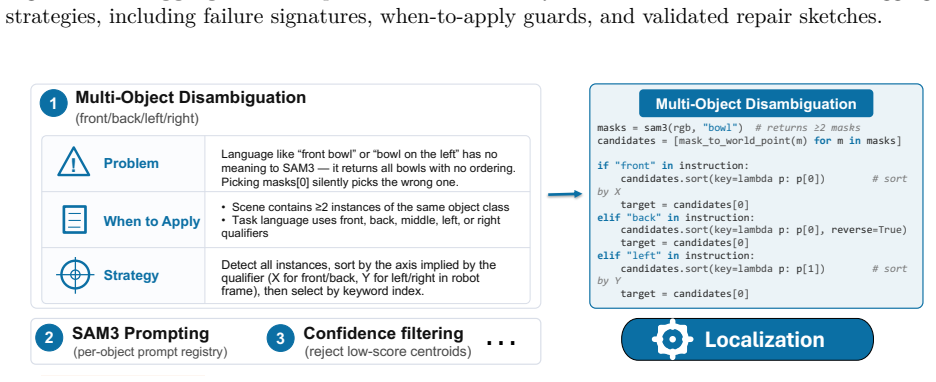
The three-part agentic loop of closed-loop multimodal execution traces, distilled reusable skill library, and evolutionary search over task sequences and programs.
If this is right
- Validated programs accumulate into a library that supports zero-shot execution on previously unseen long-horizon sequences.
- Skills discovered in simulation transfer to real robots and reduce manual programming across different robot APIs and hardware.
- Performance improves under physical perturbations and on bimanual coordination tasks relative to methods that rely on test-time reasoning.
- The same loop produces persistent skills that work across simulation, real-world, and multiple robot embodiments.
Where Pith is reading between the lines
- If the library continues to grow without bound, later tasks may solve faster simply by retrieving earlier programs rather than searching anew.
- The approach could extend to non-manipulation domains such as navigation or assembly if similar multimodal traces are available.
- Removing the evolutionary component would likely collapse generalization on novel task compositions, showing that single-trajectory refinement is insufficient.
Load-bearing premise
The robot's sensor traces are rich enough for the system to diagnose failures, synthesize repairs, and validate fixes without any human input.
What would settle it
Run the system on a new set of long-horizon tasks with novel object configurations and measure whether success rates remain above prior methods when the evolutionary search is disabled or when human intervention is required for any repair step.
Figures
read the original abstract
Traditional robot programming is challenging: it requires orchestrating multimodal perception, managing physical contact dynamics, and handling diverse configurations and execution failures. We introduce ASPIRE (Agentic Skill Programming through Iterative Robot Exploration), a continual learning system that autonomously writes and refines robot control programs in a code-as-policy paradigm while compounding experience into a reusable skill library. ASPIRE discovers skills that persist across tasks, simulation and real-world settings, and embodiments. It operates in an open-ended loop with three components: (1) a closed-loop robot execution engine that exposes fine-grained multimodal traces, enabling autonomous failure diagnosis, repair synthesis, and validation; (2) a continually expanding skill library that distills validated fixes into reusable, transferable knowledge; and (3) evolutionary search that generates diverse task sequences and control programs to explore beyond single-trajectory refinement. ASPIRE surpasses prior methods by up to 77% on LIBERO-Pro manipulation under perturbation, 72% on Robosuite bimanual handover, and 32% on BEHAVIOR-1K long-horizon household tasks. Its accumulated library also enables zero-shot generalization to unseen long-horizon tasks: on LIBERO-Pro Long, ASPIRE achieves 31% success versus 4% for prior methods despite their use of test-time reasoning and retries. Finally, simulation-discovered skills provide initial evidence of sim-to-real transfer, substantially reducing real-robot programming effort across different embodiments and robot APIs.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces ASPIRE, a continual learning system for autonomous robot skill discovery and program refinement in a code-as-policy paradigm. It operates via three components—a closed-loop execution engine for multimodal-trace-based failure diagnosis/repair/validation, a continually expanding skill library, and evolutionary search over task sequences and programs—and reports up to 77% gains on LIBERO-Pro manipulation, 72% on Robosuite bimanual handover, 32% on BEHAVIOR-1K household tasks, plus 31% zero-shot success on unseen long-horizon tasks and preliminary sim-to-real transfer.
Significance. If the claimed autonomy and library compounding hold, the work could meaningfully advance open-ended robot learning by demonstrating persistent, transferable skills that reduce human programming effort across embodiments and settings.
major comments (3)
- [Abstract] Abstract: the headline quantitative claims (77% LIBERO-Pro, 72% Robosuite, 32% BEHAVIOR-1K, 31% zero-shot on LIBERO-Pro Long) are presented without any information on trial counts, statistical tests, baseline re-implementations, data exclusion criteria, or error bars, so it is impossible to determine whether the numbers support the central performance claims.
- [Section 3 (system description)] The closed-loop robot execution engine (component 1) is asserted to enable fully autonomous failure diagnosis, repair synthesis, and validation from fine-grained multimodal traces with zero human input, yet the manuscript supplies neither the diagnosis algorithm, the trace-to-repair mapping, nor the validation loop; these details are load-bearing for the autonomy claim.
- [Section 3 (system description)] The evolutionary search component (component 3) is described at a high level as generating diverse task sequences and programs, but the manuscript provides no specification of the evolutionary operators, population size, fitness function, or selection mechanism, making it impossible to assess whether the search productively explores beyond single-trajectory refinement.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the clarity of our quantitative claims and system descriptions. We address each major comment below and commit to revisions that strengthen the manuscript without altering its core contributions.
read point-by-point responses
-
Referee: [Abstract] Abstract: the headline quantitative claims (77% LIBERO-Pro, 72% Robosuite, 32% BEHAVIOR-1K, 31% zero-shot on LIBERO-Pro Long) are presented without any information on trial counts, statistical tests, baseline re-implementations, data exclusion criteria, or error bars, so it is impossible to determine whether the numbers support the central performance claims.
Authors: We agree the abstract would benefit from explicit context on the experimental protocol. In the revision we will add a parenthetical note directing readers to Section 4, which reports trial counts (50 independent rollouts per task), standard-error bars, paired t-test results against baselines, re-implementation details for all comparators, and the data-exclusion criteria (failed hardware resets only). This change preserves the headline numbers while enabling readers to evaluate their reliability. revision: yes
-
Referee: [Section 3 (system description)] The closed-loop robot execution engine (component 1) is asserted to enable fully autonomous failure diagnosis, repair synthesis, and validation from fine-grained multimodal traces with zero human input, yet the manuscript supplies neither the diagnosis algorithm, the trace-to-repair mapping, nor the validation loop; these details are load-bearing for the autonomy claim.
Authors: Section 3.1 currently gives a high-level overview of the multimodal trace collection and LLM-driven repair. We acknowledge that the precise diagnosis prompt template, the trace-to-edit mapping procedure, and the re-execution validation loop are not presented with pseudocode or implementation-level specificity. The revised manuscript will insert an expanded algorithmic subsection (3.1.1) containing the diagnosis algorithm, the code-generation mapping, and the validation loop pseudocode to make the zero-human-input claim fully verifiable. revision: yes
-
Referee: [Section 3 (system description)] The evolutionary search component (component 3) is described at a high level as generating diverse task sequences and programs, but the manuscript provides no specification of the evolutionary operators, population size, fitness function, or selection mechanism, making it impossible to assess whether the search productively explores beyond single-trajectory refinement.
Authors: Section 3.3 presents the evolutionary search at a conceptual level. We accept that the concrete operators, population size, fitness function, and selection rule are not specified. The revision will add these details (mutation and crossover operators on both task sequences and code, population size of 100, fitness as success rate weighted by execution efficiency, tournament selection) together with a short analysis showing how the search generates trajectories distinct from single-trajectory refinement. revision: yes
Circularity Check
No circularity; purely empirical system description with no derivations
full rationale
The paper describes an agentic robot programming system and reports empirical benchmark results (e.g., success rates on LIBERO-Pro, Robosuite, BEHAVIOR-1K) without any equations, derivations, fitted parameters presented as predictions, or mathematical claims. The three components (closed-loop engine, skill library, evolutionary search) are presented as design choices whose performance is validated externally on standard tasks, not derived from or equivalent to their own inputs. No self-citation chains, uniqueness theorems, or ansatzes are invoked in a load-bearing way. The derivation chain is therefore self-contained and non-circular by the enumerated patterns.
Axiom & Free-Parameter Ledger
free parameters (1)
- Evolutionary search and LLM prompt hyperparameters
axioms (2)
- domain assumption Multimodal execution traces are sufficient for autonomous failure diagnosis and repair synthesis in the closed-loop engine.
- domain assumption Validated fixes can be distilled into reusable, transferable skills that persist across tasks, simulation, real-world, and embodiments.
invented entities (1)
-
Continually expanding skill library
no independent evidence
Reference graph
Works this paper leans on
-
[1]
SkillFlow:Benchmarking Lifelong Skill Discovery and Evolution for Autonomous Agents
URLhttps://arxiv.org/abs/2604.17308. Xueyang Zhou, Yangming Xu, Guiyao Tie, Yongchao Chen, Guowen Zhang, Duanfeng Chu, Pan Zhou, and Lichao Sun. Libero-pro: Towards robust and fair evaluation of vision-language-action models beyond memorization.arXiv preprint arXiv:2510.03827, 2025. Yuke Zhu, Josiah Wong, Ajay Mandlekar, Roberto Martín-Martín, Abhishek Jo...
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[2]
Reads the progress tracker
-
[3]
Dispatches the next eligible task on the freed device
-
[4]
Reads the completed task’s ‘findings.md‘
-
[5]
Promotes generalizable patterns into the shared skill library
-
[6]
If the result does not include a device identifier, query the device monitor to infer which device is free
Goes idle again. If the result does not include a device identifier, query the device monitor to infer which device is free. #### 5. Update Shared Skills After each completion, read: ‘‘‘text <BASELINE_OUTPUT_DIR>/<SUITE>/<TASK>/findings.md ‘‘‘ Promote only generalizable patterns to the skill library. ‘... (skill-library category table omitted) ...‘ ### Va...
-
[7]
Read the successful generated program
-
[8]
Extract the final code block if multiple attempts are present
-
[9]
Test it on a small number of failed debugging seeds
-
[10]
If it succeeds, save it as the task-level ‘fix_code.py‘ and proceed to Stage 2
-
[11]
<prompt1>
If it fails, continue to the full debug loop. If no debugging seeds succeeded, continue directly to the full debug loop. ‘... (exact replay command and temporary output paths omitted) ...‘ #### Step 2: Diagnose Failed Debugging Seeds For each failed seed, inspect the last attempt for that seed: - ‘trace.json‘: function calls, return values, perception fai...
-
[12]
Update ‘task_analysis.md‘ with new geometry from keyframes
-
[13]
Append an iteration log with the leaderboard, eliminated hypotheses, and open questions
-
[14]
Write K new candidates seeded from the top survivors of the current iteration
-
[15]
Evaluate all candidates on the same debug seed set
-
[16]
""Build a top-down end-effector quaternion (xyzw→wxyz convention used by solve_ik)
Read trace-analysis output and watch for arm blocking, gripper-width signals, perception failures, and IK failures. #### Step 6: Save Best Code, Run Stage 2, Write Findings Save the best final candidate as ‘<EVOSEARCH_OUTPUT_DIR>/<SUITE>/<TASK>/evosearch_best_code.py‘. If the best candidate does not beat the baseline candidate on debug seeds, fall back to...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.