Recognition: 2 theorem links
· Lean TheoremSwitch-JustDance: Benchmarking Whole Body Motion Tracking Controllers Using a Commercial Console Game
Pith reviewed 2026-05-17 06:30 UTC · model grok-4.3
The pith
A Nintendo Switch dance game supplies a low-cost, reproducible way to score whole-body robot motion tracking.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
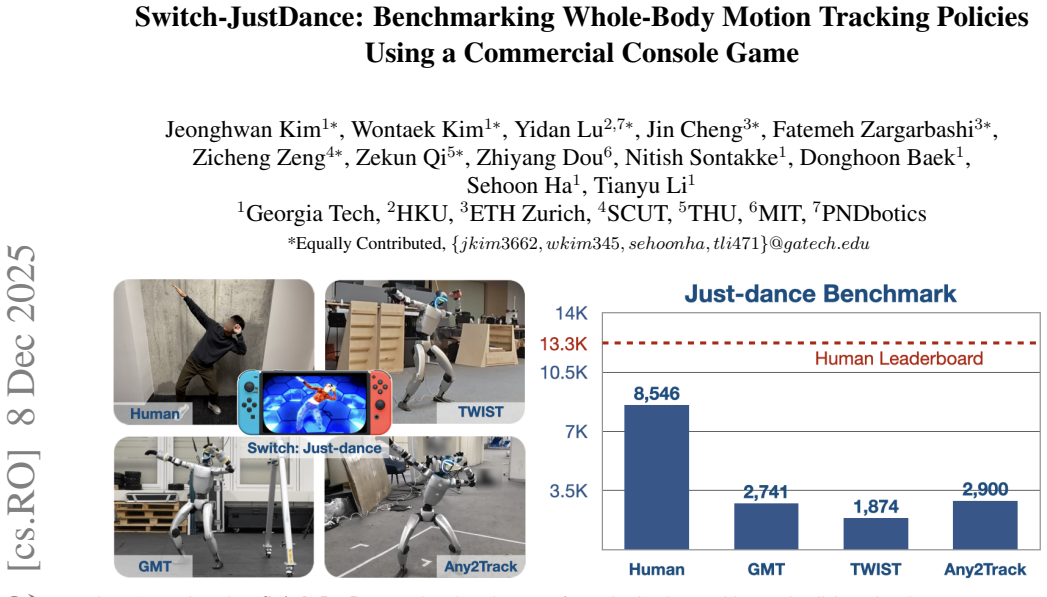
Switch-JustDance converts in-game choreography into robot-executable motions through streaming, motion reconstruction, and retargeting, then uses the game's scoring system as the primary performance metric. Validation experiments establish that the scoring is reliable, valid, sensitive, and sufficiently hardware-agnostic for benchmarking purposes. The method is applied to three state-of-the-art humanoid controllers on physical hardware, yielding direct quantitative comparisons.
What carries the argument
The Switch-JustDance pipeline that streams, reconstructs, retargets, and scores motions via the Nintendo Switch Just Dance scoring system.
If this is right
- Controllers can be ranked on identical, publicly reproducible dance sequences without shared lab equipment.
- Human and robot performance become directly comparable on the same motion set using the same metric.
- New whole-body controllers can be evaluated on real hardware in hours rather than weeks of setup.
- The approach supplies a quantitative baseline that any lab with a Switch console can replicate.
Where Pith is reading between the lines
- The same game-based scoring could be adapted to evaluate balance or locomotion controllers by selecting appropriate songs.
- If the scoring generalizes, it could become a de-facto public benchmark that reduces duplication of motion-capture setups across groups.
- Extending the retargeting module to non-humanoid morphologies would test whether the evaluation remains fair across robot designs.
Load-bearing premise
The game's built-in score gives a reliable, unbiased reading of how well a robot tracks full-body motion.
What would settle it
A controlled test in which two robots with measurably different joint-tracking error receive identical or reversed game scores on the same choreography.
Figures


read the original abstract
Recent advances in whole-body robot control have enabled humanoid and legged robots to perform increasingly agile and coordinated motions. However, standardized benchmarks for evaluating these capabilities in real-world settings, and in direct comparison to humans, remain scarce. Existing evaluations often rely on pre-collected human motion datasets or simulation-based experiments, which limit reproducibility, overlook hardware factors, and hinder fair human-robot comparisons. We present Switch-JustDance, a low-cost and reproducible benchmarking pipeline that leverages motion-sensing console games, Just Dance on the Nintendo Switch, to evaluate robot whole-body control. Using Just Dance on the Nintendo Switch as a representative platform, Switch-JustDance converts in-game choreography into robot-executable motions through streaming, motion reconstruction, and motion retargeting modules and enables users to evaluate controller performance through the game's built-in scoring system. We first validate the evaluation properties of Just Dance, analyzing its reliability, validity, sensitivity, and potential sources of bias. Our results show that the platform provides consistent and interpretable performance measures, making it a suitable tool for benchmarking embodied AI. Building on this foundation, we benchmark three state-of-the-art humanoid whole-body controllers on hardware and provide insights into their relative strengths and limitations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Switch-JustDance, a low-cost reproducible benchmarking pipeline that uses Just Dance on the Nintendo Switch to evaluate whole-body motion tracking controllers for humanoid robots. Choreography is streamed, reconstructed, and retargeted to robot hardware; performance is then quantified via the game's built-in scoring system. The authors first validate the platform's reliability, validity, sensitivity, and bias, report that these properties are acceptable, and then benchmark three state-of-the-art humanoid whole-body controllers on physical hardware, offering comparative insights.
Significance. If the validation of the scoring proxy holds, the work supplies a practical, hardware-agnostic, and directly comparable-to-human benchmark for embodied whole-body control that sidesteps the limitations of simulation-only or offline-dataset evaluations. The low-cost, off-the-shelf nature could accelerate reproducible research in robotics.
major comments (1)
- [Validation section (abstract and §4)] Validation of the evaluation properties (reliability, validity, sensitivity, bias): the manuscript states that these were analyzed and found acceptable, yet provides no concrete evidence that the proprietary scoring algorithm (timing windows, pose-style bonuses, sensor-noise models) transfers without bias to retargeted robot motions whose kinematics, dynamics, and retargeting artifacts differ from human performers. This assumption is load-bearing for the central claims of fair controller comparisons and human-robot equivalence.
minor comments (2)
- [§3.2] The motion retargeting module (§3.2) would benefit from an explicit description or pseudocode of the mapping function and any tunable parameters to support reproducibility.
- [Results figures] Figure captions for the benchmarking results should state the number of trials per controller and any statistical tests used to compare scores.
Simulated Author's Rebuttal
We thank the referee for their constructive and insightful comments on our manuscript. We address the major comment below and have revised the manuscript to strengthen the presentation of our validation results.
read point-by-point responses
-
Referee: [Validation section (abstract and §4)] Validation of the evaluation properties (reliability, validity, sensitivity, bias): the manuscript states that these were analyzed and found acceptable, yet provides no concrete evidence that the proprietary scoring algorithm (timing windows, pose-style bonuses, sensor-noise models) transfers without bias to retargeted robot motions whose kinematics, dynamics, and retargeting artifacts differ from human performers. This assumption is load-bearing for the central claims of fair controller comparisons and human-robot equivalence.
Authors: We agree that explicit evidence for the scoring system's behavior on retargeted robot motions is important to support our claims. The validation experiments in §4 establish reliability via repeated human trials, validity through correlation with independent motion quality measures, sensitivity to controlled perturbations in timing and pose, and acceptable bias levels under human performance conditions. To directly address transferability, the revised manuscript now includes a new subsection in §4 that applies the full pipeline (including retargeting) to a subset of human motion data and compares resulting game scores against the original human executions. These results show that while absolute scores can shift modestly due to kinematic differences, relative rankings and sensitivity to motion quality are preserved, supporting the use of the benchmark for controller comparisons. We have also added an expanded limitations paragraph discussing retargeting artifacts and the inherent opacity of the proprietary scoring function. We cannot, however, reverse-engineer the exact timing windows or sensor models. revision: yes
Circularity Check
No significant circularity; benchmarking relies on external game scoring
full rationale
The paper's core contribution is a pipeline that streams choreography from Just Dance on Nintendo Switch hardware, retargets motions to robots, and evaluates controllers via the game's built-in scoring system. Validation of reliability, validity, sensitivity, and bias is described as empirical analysis of the external platform rather than any self-referential fitting or derivation. No equations, fitted parameters, or self-citation chains reduce the benchmark scores or claims to inputs defined by the authors' own data or prior work. The approach treats the console game's scoring as an independent, hardware-agnostic measure, keeping the derivation self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Motion retargeting from human to humanoid kinematics preserves task-relevant features for scoring purposes
- domain assumption The Nintendo Switch motion-sensing hardware and game scoring algorithm produce consistent, interpretable performance measures
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We present Switch-JustDance, a low-cost and reproducible benchmarking pipeline that leverages motion-sensing console games, Just Dance on the Nintendo Switch, to evaluate robot whole-body control.
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanabsolute_floor_iff_bare_distinguishability unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We first validate the evaluation properties of Just Dance, analyzing its reliability, validity, sensitivity, and potential sources of bias.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Controllerpose: inside-out body capture with vr controller cameras
Karan Ahuja, Vivian Shen, Cathy Mengying Fang, Nathan Riopelle, Andy Kong, and Chris Harrison. Controllerpose: inside-out body capture with vr controller cameras. InCon- ference on Human Factors in Computing Systems (CHI), pages 1–13, 2022. 3
work page 2022
-
[2]
Marc G Bellemare, Yavar Naddaf, Joel Veness, and Michael Bowling. The arcade learning environment: An evaluation platform for general agents.Journal of artificial intelligence research (JAIR), 47:253–279, 2013. 3
work page 2013
-
[3]
James William Burke, MDJ McNeill, Darryl K Charles, Philip J Morrow, Jacqui H Crosbie, and Suzanne M Mc- Donough. Optimising engagement for stroke rehabilitation using serious games.The Visual Computer, 25(12):1085– 1099, 2009. 3
work page 2009
- [4]
- [5]
-
[6]
Gmt: Gen- eral motion tracking for humanoid whole-body control
Zixuan Chen, Mazeyu Ji, Xuxin Cheng, Xuanbin Peng, Xue Bin Peng, and Xiaolong Wang. Gmt: Gen- eral motion tracking for humanoid whole-body control. arXiv:2506.14770, 2025. 1, 2, 6
-
[7]
Xuxin Cheng, Jialong Li, Shiqi Yang, Ge Yang, and Xiao- long Wang. Open-television: Teleoperation with immer- sive active visual feedback.Conference on Robot Learning (CoRL), 2024. 3
work page 2024
-
[8]
Linxi Fan, Guanzhi Wang, Yunfan Jiang, Ajay Mandlekar, Yuncong Yang, Haoyi Zhu, Andrew Tang, De-An Huang, Yuke Zhu, and Anima Anandkumar. Minedojo: Build- ing open-ended embodied agents with internet-scale knowl- edge.Advances in Neural Information Processing Systems (NeurIPS), 35:18343–18362, 2022. 3
work page 2022
-
[9]
Statistical methods for research work- ers
Ronald Aylmer Fisher. Statistical methods for research work- ers. InBreakthroughs in statistics: Methodology and distri- bution, pages 66–70. Springer, 1970. 5
work page 1970
-
[10]
Tamar Flash and Neville Hogan. The coordination of arm movements: an experimentally confirmed mathemati- cal model.Journal of neuroscience (JNR), 5(7):1688–1703,
-
[11]
Harvey, Mike Yurick, Derek Nowrouzezahrai, and Christopher Pal
F ´elix G. Harvey, Mike Yurick, Derek Nowrouzezahrai, and Christopher Pal. Robust motion in-betweening.ACM Trans- actions on Graphics (TOG), 39(4), 2020. 2
work page 2020
-
[12]
Tairan He, Zhengyi Luo, Xialin He, Wenli Xiao, Chong Zhang, Weinan Zhang, Kris Kitani, Changliu Liu, and Guanya Shi. Omnih2o: Universal and dexterous human-to- humanoid whole-body teleoperation and learning.Confer- ence on Robot Learning (CoRL), 2024. 3
work page 2024
-
[13]
Learning human-to- humanoid real-time whole-body teleoperation
Tairan He, Zhengyi Luo, Wenli Xiao, Chong Zhang, Kris Kitani, Changliu Liu, and Guanya Shi. Learning human-to- humanoid real-time whole-body teleoperation. InIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 8944–8951. IEEE, 2024. 3
work page 2024
-
[14]
Tairan He, Wenli Xiao, Toru Lin, Zhengyi Luo, Zhenjia Xu, Zhenyu Jiang, Changliu Liu, Guanya Shi, Xiaolong Wang, Linxi Fan, and Yuke Zhu. Hover: Versatile neural whole- body controller for humanoid robots.IEEE International Conference on Robotics and Automation (ICRA), 2024. 2
work page 2024
-
[15]
Anssi Kanervisto, Stephanie Milani, Karolis Ramanauskas, Nicholay Topin, Zichuan Lin, Junyou Li, Jianing Shi, De- heng Ye, Qiang Fu, Wei Yang, et al. Minerl diamond 2021 competition: Overview, results, and lessons learned.Com- petitions and Demonstrations Track (NeurIPS), pages 13–28,
work page 2021
-
[16]
Vizdoom: A doom-based ai research platform for visual reinforcement learning
Michał Kempka, Marek Wydmuch, Grzegorz Runc, Jakub Toczek, and Wojciech Ja´skowski. Vizdoom: A doom-based ai research platform for visual reinforcement learning. In IEEE conference on computational intelligence and games (CIG), pages 1–8. IEEE, 2016. 3
work page 2016
-
[17]
David G. Kendall. A survey of the statistical theory of shape. Statistical Science, 4(2):87–99, 1989. 4
work page 1989
-
[18]
The problem of m rankings.The annals of mathematical statistics, 10(3): 275–287, 1939
Maurice G Kendall and B Babington Smith. The problem of m rankings.The annals of mathematical statistics, 10(3): 275–287, 1939. 5
work page 1939
-
[19]
Charles Khazoom, Seungwoo Hong, Matthew Chignoli, Eli- jah Stanger-Jones, and Sangbae Kim. Tailoring solution accuracy for fast whole-body model predictive control of legged robots.IEEE Robotics and Automation Letters (RA- L), 2024. 1, 2
work page 2024
-
[20]
He Li and Patrick M Wensing. Cafe-mpc: A cascaded- fidelity model predictive control framework with tuning-free whole-body control.IEEE Transactions on Robotics (T-RO),
-
[21]
Jialong Li, Xuxin Cheng, Tianshu Huang, Shiqi Yang, Rizhao Qiu, and Xiaolong Wang. Amo: Adaptive motion op- timization for hyper-dexterous humanoid whole-body con- trol.Robotics: Science and Systems (RSS), 2025. 1, 2
work page 2025
-
[22]
Matthew Loper, Naureen Mahmood, Javier Romero, Gerard Pons-Moll, and Michael J. Black. SMPL: A skinned multi- person linear model.ACM Transactions on Graphics (The proceeding of SIGGRAPH Asia), 34(6):248:1–248:16, 2015. 4
work page 2015
-
[23]
Troje, Ger- ard Pons-Moll, and Michael J
Naureen Mahmood, Nima Ghorbani, Nikolaus F. Troje, Ger- ard Pons-Moll, and Michael J. Black. AMASS: Archive of motion capture as surface shapes. InIEEE International Conference on Computer Vision (ICCV), pages 5442–5451,
-
[24]
Retrospective analysis of the 2019 minerl competition on sample efficient rein- forcement learning
Stephanie Milani, Nicholay Topin, Brandon Houghton, William H Guss, Sharada P Mohanty, Keisuke Nakata, Oriol Vinyals, and Noboru Sean Kuno. Retrospective analysis of the 2019 minerl competition on sample efficient rein- forcement learning. Incompetition and demonstration track (NeurIPS), pages 203–214. PMLR, 2020. 3
work page 2019
-
[25]
Human-level control through deep reinforcement learn- ing.Nature, 518(7540):529–533, 2015
V olodymyr Mnih, Koray Kavukcuoglu, David Silver, An- drei A Rusu, Joel Veness, Marc G Bellemare, Alex Graves, Martin Riedmiller, Andreas K Fidjeland, Georg Ostrovski, et al. Human-level control through deep reinforcement learn- ing.Nature, 518(7540):529–533, 2015. 3
work page 2015
- [26]
-
[27]
Playing for data: Ground truth from computer games
Stephan R Richter, Vibhav Vineet, Stefan Roth, and Vladlen Koltun. Playing for data: Ground truth from computer games. InEuropean conference on computer vision (ECVA), pages 102–118. Springer, 2016. 3
work page 2016
-
[28]
Carmelo Sferrazza, Dun-Ming Huang, Xingyu Lin, Young- woon Lee, and Pieter Abbeel. Humanoidbench: Simulated humanoid benchmark for whole-body locomotion and ma- nipulation.Robotics: Science and Systems (RSS), 2024. 2
work page 2024
-
[29]
World-grounded human motion recovery via gravity-view coordinates
Zehong Shen, Huaijin Pi, Yan Xia, Zhi Cen, Sida Peng, Zechen Hu, Hujun Bao, Ruizhen Hu, and Xiaowei Zhou. World-grounded human motion recovery via gravity-view coordinates. InACM Transactions on Graphics (The pro- ceeding of SIGGRAPH Asia), pages 1–11, 2024. 4
work page 2024
-
[30]
Real-time human pose recognition in parts from sin- gle depth images
Jamie Shotton, Andrew Fitzgibbon, Mat Cook, Toby Sharp, Mark Finocchio, Richard Moore, Alex Kipman, and Andrew Blake. Real-time human pose recognition in parts from sin- gle depth images. InIEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 1297–1304. Ieee, 2011. 3
work page 2011
-
[31]
Aayam Shrestha, Pan Liu, German Ros, Kai Yuan, and Alan Fern. Generating physically realistic and directable human motions from multi-modal inputs.European Computer Vi- sion Association (ECCV), 2024. 2
work page 2024
-
[32]
Patrick E Shrout and Joseph L Fleiss. Intraclass correlations: uses in assessing rater reliability.Psychological bulletin, 86 (2):420, 1979. 5
work page 1979
-
[33]
A benchmark for the eval- uation of rgb-d slam systems
J ¨urgen Sturm, Nikolas Engelhard, Felix Endres, Wolfram Burgard, and Daniel Cremers. A benchmark for the eval- uation of rgb-d slam systems. InIEEE/RSJ international conference on intelligent robots and systems (IROS), pages 573–580. IEEE, 2012. 3
work page 2012
-
[34]
Chen Tessler, Yunrong Guo, Ofir Nabati, Gal Chechik, and Xue Bin Peng. Maskedmimic: Unified physics-based char- acter control through masked motion inpainting.ACM Trans- actions on Graphics (TOG), 2024. 2
work page 2024
- [35]
-
[36]
StarCraft II: A New Challenge for Reinforcement Learning
Oriol Vinyals, Timo Ewalds, Sergey Bartunov, Petko Georgiev, Alexander Vezhnevets, Michelle Yeo, Alireza Makhzani, Heinrich K ¨uttler, John Agapiou, Julian Schrit- twieser, John Quan, Stephen Gaffney, Stig Petersen, Karen Simonyan, Tom Schaul, Hado Van Hasselt, David Silver, Timothy Lillicrap, Kevin Calderone, and Rodney Tsing. Starcraft ii: A new challen...
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[37]
Quest- sim: Human motion tracking from sparse sensors with sim- ulated avatars
Alexander Winkler, Jungdam Won, and Yuting Ye. Quest- sim: Human motion tracking from sparse sensors with sim- ulated avatars. InACM Transactions on Graphics (The pro- ceeding of SIGGRAPH Asia), pages 1–8, 2022. 3
work page 2022
-
[38]
Weiji Xie, Jinrui Han, Jiakun Zheng, Huanyu Li, Xinzhe Liu, Jiyuan Shi, Weinan Zhang, Chenjia Bai, and Xuelong Li. Kungfubot: Physics-based humanoid whole-body con- trol for learning highly-dynamic skills.Advances in Neural Information Processing Systems (NeurIPS), 2025. 1, 2
work page 2025
- [39]
- [40]
-
[41]
Un- leashing humanoid reaching potential via real-world-ready skill space, 2025
Zhikai Zhang, Chao Chen, Han Xue, Jilong Wang, Sikai Liang, Yun Liu, Zongzhang Zhang, He Wang, and Li Yi. Un- leashing humanoid reaching potential via real-world-ready skill space, 2025. 3
work page 2025
-
[42]
Track any motions under any disturbances
Zhikai Zhang, Jun Guo, Chao Chen, Jilong Wang, Chenghuai Lin, Yunrui Lian, Han Xue, Zhenrong Wang, Maoqi Liu, Jiangran Lyu, Huaping Liu, He Wang, and Li Yi. Track any motions under any disturbances. arXiv:2509.13833, 2025. 2, 6 Switch-JustDance: Benchmarking Whole-Body Motion Tracking Policies Using a Commercial Console Game Supplementary Material A. Impl...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.