Recognition: unknown
Habitat-GS: A High-Fidelity Navigation Simulator with Dynamic Gaussian Splatting
Pith reviewed 2026-05-10 15:20 UTC · model grok-4.3
The pith
Integrating 3D Gaussian Splatting and dynamic Gaussian avatars into a navigation simulator boosts agent generalization to new domains and human interactions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Habitat-GS extends Habitat-Sim with a 3DGS renderer for real-time photorealistic rendering and a Gaussian avatar module where each avatar serves as both a photorealistic visual entity and a navigation obstacle, resulting in improved cross-domain generalization for point-goal navigation agents and effective human-aware navigation.
What carries the argument
The 3D Gaussian Splatting renderer combined with the Gaussian avatar module that provides both visual fidelity and collision detection for dynamic humans.
Load-bearing premise
The photorealism and collision modeling from 3D Gaussian Splatting and drivable avatars are sufficient to improve real-world generalization without introducing new artifacts or biases in agent behavior.
What would settle it
A real-world deployment test in which agents trained in Habitat-GS show no better or worse performance than agents trained in standard mesh-based Habitat-Sim when navigating around actual moving people in varied physical environments.
Figures







read the original abstract
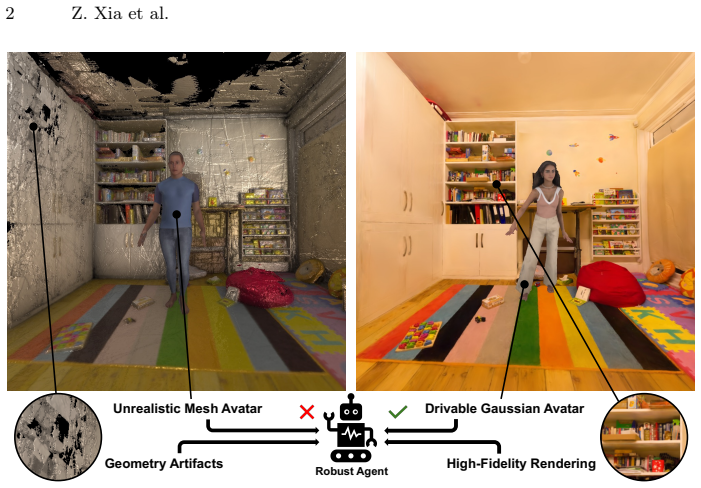
Training embodied AI agents depends critically on the visual fidelity of simulation environments and the ability to model dynamic humans. Current simulators rely on mesh-based rasterization with limited visual realism, and their support for dynamic human avatars, where available, is constrained to mesh representations, hindering agent generalization to human-populated real-world scenarios. We present Habitat-GS, a navigation-centric embodied AI simulator extended from Habitat-Sim that integrates 3D Gaussian Splatting scene rendering and drivable gaussian avatars while maintaining full compatibility with the Habitat ecosystem. Our system implements a 3DGS renderer for real-time photorealistic rendering and supports scalable 3DGS asset import from diverse sources. For dynamic human modeling, we introduce a gaussian avatar module that enables each avatar to simultaneously serve as a photorealistic visual entity and an effective navigation obstacle, allowing agents to learn human-aware behaviors in realistic settings. Experiments on point-goal navigation demonstrate that agents trained on 3DGS scenes achieve stronger cross-domain generalization, with mixed-domain training being the most effective strategy. Evaluations on avatar-aware navigation further confirm that gaussian avatars enable effective human-aware navigation. Finally, performance benchmarks validate the system's scalability across varying scene complexity and avatar counts.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Habitat-GS, an extension of Habitat-Sim that integrates 3D Gaussian Splatting for real-time photorealistic scene rendering and drivable Gaussian avatars for dynamic human modeling in navigation tasks. It maintains full compatibility with the Habitat ecosystem, supports scalable asset import, and presents experiments showing that agents trained on 3DGS scenes achieve stronger cross-domain generalization in point-goal navigation (with mixed-domain training most effective) while Gaussian avatars enable effective human-aware navigation.
Significance. If the reported results hold, the work is significant for embodied AI because it directly addresses two key simulator limitations—visual fidelity and dynamic human modeling—using 3DGS, which has the potential to improve sim-to-real transfer for navigation agents in human-populated environments. The dual role of Gaussian avatars as both photorealistic visuals and collision obstacles is a practical engineering contribution, and the maintained Habitat compatibility lowers barriers to adoption. The stress-test concern regarding new artifacts or biases from 3DGS fidelity does not appear to land as a load-bearing issue given the described implementation and positive experimental outcomes.
minor comments (2)
- Abstract: The summary of experimental outcomes would be strengthened by including at least one key quantitative metric (e.g., success rate or SPL improvement) and a brief mention of baselines, even if full details appear later in the paper.
- The manuscript would benefit from a short dedicated subsection or paragraph clarifying how Gaussian avatar collision geometry is derived from the splat representation and whether any approximation steps are involved.
Simulated Author's Rebuttal
We thank the referee for the positive summary of Habitat-GS, recognition of its significance for embodied AI, and recommendation for minor revision. No specific major comments were raised in the report.
Circularity Check
No significant circularity
full rationale
The paper is an engineering description of a simulator extension (Habitat-GS) that integrates 3D Gaussian Splatting rendering and drivable avatars into Habitat-Sim. All central claims rest on system implementation details and reported experimental outcomes (point-goal navigation generalization and avatar-aware navigation performance). No derivation chain, equations, first-principles predictions, or fitted parameters labeled as predictions exist in the provided text. No self-citations are invoked as load-bearing uniqueness theorems or ansatzes. The work is self-contained against external benchmarks via direct experiments.
Axiom & Free-Parameter Ledger
invented entities (1)
-
drivable gaussian avatars
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Anderson, P., Chang, A., Chaplot, D.S., Dosovitskiy, A., Gupta, S., Koltun, V., Kosecka, J., Malik, J., Mottaghi, R., Savva, M., Zamir, A.R.: On evaluation of embodied navigation agents (2018),https://arxiv.org/abs/1807.06757
work page internal anchor Pith review arXiv 2018
- [2]
- [3]
-
[4]
Cho, K., van Merrienboer, B., Gulcehre, C., Bahdanau, D., Bougares, F., Schwenk, H., Bengio, Y.: Learning phrase representations using rnn encoder-decoder for sta- tistical machine translation (2014),https://arxiv.org/abs/1406.1078
work page internal anchor Pith review arXiv 2014
-
[5]
Bear, Dan Gutfreund, David Cox, Antonio Torralba, James J
Gan, C., Schwartz, J., Alter, S., Mrowca, D., Schrimpf, M., Traer, J., Freitas, J.D., Kubilius,J.,Bhandwaldar,A.,Haber,N.,Sano,M.,Kim,K.,Wang,E.,Lingelbach, M., Curtis, A., Feigelis, K., Bear, D.M., Gutfreund, D., Cox, D., Torralba, A., DiCarlo, J.J., Tenenbaum, J.B., McDermott, J.H., Yamins, D.L.K.: Threedworld: Aplatformforinteractivemulti-modalphysical...
-
[6]
He, K., Zhang, X., Ren, S., Sun, J.: Deep residual learning for image recognition (2015),https://arxiv.org/abs/1512.03385
work page internal anchor Pith review arXiv 2015
- [7]
- [8]
-
[9]
Kolve, E., Mottaghi, R., Han, W., VanderBilt, E., Weihs, L., Herrasti, A., Deitke, M., Ehsani, K., Gordon, D., Zhu, Y., Kembhavi, A., Gupta, A., Farhadi, A.: Ai2- thor: An interactive 3d environment for visual ai (2022),https://arxiv.org/abs/ 1712.05474
work page internal anchor Pith review arXiv 2022
- [10]
-
[11]
Li, C., Xia, F., Martín-Martín, R., Lingelbach, M., Srivastava, S., Shen, B., Vainio, K., Gokmen, C., Dharan, G., Jain, T., Kurenkov, A., Liu, C.K., Gweon, H., Wu, J., Fei-Fei, L., Savarese, S.: igibson 2.0: Object-centric simulation for robot learning of everyday household tasks (2021),https://arxiv.org/abs/2108.03272
-
[12]
In: Proceed- ings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) (2024)
Li, Z., Zheng, Z., Wang, L., Liu, Y.: Animatable gaussians: Learning pose- dependent gaussian maps for high-fidelity human avatar modeling. In: Proceed- ings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) (2024)
2024
- [13]
-
[14]
Loper, M., Mahmood, N., Romero, J., Pons-Moll, G., Black, M.J.: SMPL: A skinnedmulti-personlinearmodel.ACMTrans.Graphics(Proc.SIGGRAPHAsia) 34(6), 248:1–248:16 (Oct 2015)
2015
-
[15]
arXiv preprint arXiv:2308.09713 , year=
Luiten, J., Kopanas, G., Leibe, B., Ramanan, D.: Dynamic 3d gaussians: Tracking by persistent dynamic view synthesis (2023),https://arxiv.org/abs/2308.09713 16 Z. Xia et al
- [16]
-
[17]
Instant neural graphics primitives with a multiresolution hash encoding
Müller, T., Evans, A., Schied, C., Keller, A.: Instant neural graphics primitives with a multiresolution hash encoding. ACM Transactions on Graphics41(4), 1–15 (Jul 2022).https://doi.org/10.1145/3528223.3530127,http://dx.doi.org/ 10.1145/3528223.3530127
-
[18]
NVIDIA: Isaac Sim,https://github.com/isaac-sim/IsaacSim
- [19]
-
[20]
Poole, B., Jain, A., Barron, J.T., Mildenhall, B.: Dreamfusion: Text-to-3d using 2d diffusion (2022),https://arxiv.org/abs/2209.14988
work page internal anchor Pith review arXiv 2022
-
[21]
Puig, X., Undersander, E., Szot, A., Cote, M.D., Yang, T.Y., Partsey, R., Desai, R., Clegg, A.W., Hlavac, M., Min, S.Y., Vondruš, V., Gervet, T., Berges, V.P., Turner, J.M., Maksymets, O., Kira, Z., Kalakrishnan, M., Malik, J., Chaplot, D.S., Jain, U., Batra, D., Rai, A., Mottaghi, R.: Habitat 3.0: A co-habitat for humans, avatars and robots (2023),https:...
-
[22]
Ramakrishnan, S.K., Gokaslan, A., Wijmans, E., Maksymets, O., Clegg, A., Turner, J., Undersander, E., Galuba, W., Westbury, A., Chang, A.X., Savva, M., Zhao, Y., Batra, D.: Habitat-matterport 3d dataset (hm3d): 1000 large-scale 3d environments for embodied ai (2021),https://arxiv.org/abs/2109.08238
work page internal anchor Pith review arXiv 2021
- [23]
-
[24]
Shen, B., Xia, F., Li, C., Martín-Martín, R., Fan, L., Wang, G., Pérez-D’Arpino, C., Buch, S., Srivastava, S., Tchapmi, L.P., Tchapmi, M.E., Vainio, K., Wong, J., Fei-Fei, L., Savarese, S.: igibson 1.0: a simulation environment for interactive tasks in large realistic scenes (2021),https://arxiv.org/abs/2012.02924
-
[25]
co / datasets / spatialverse/InteriorGS(2025)
SpatialVerse Research Team, M.T.I.: Interiorgs: A 3d gaussian splatting dataset of semantically labeled indoor scenes.https : / / huggingface . co / datasets / spatialverse/InteriorGS(2025)
2025
-
[26]
Straub, J., Whelan, T., Ma, L., Chen, Y., Wijmans, E., Green, S., Engel, J.J., Mur- Artal, R., Ren, C., Verma, S., Clarkson, A., Yan, M., Budge, B., Yan, Y., Pan, X., Yon, J., Zou, Y., Leon, K., Carter, N., Briales, J., Gillingham, T., Mueggler, E., Pesqueira, L., Savva, M., Batra, D., Strasdat, H.M., Nardi, R.D., Goesele, M., Lovegrove, S., Newcombe, R.:...
work page internal anchor Pith review arXiv 2019
-
[27]
Szot, A., Clegg, A., Undersander, E., Wijmans, E., Zhao, Y., Turner, J., Maestre, N.,Mukadam,M.,Chaplot,D.,Maksymets,O.,Gokaslan,A.,Vondrus,V.,Dharur, S., Meier, F., Galuba, W., Chang, A., Kira, Z., Koltun, V., Malik, J., Savva, M., Batra, D.: Habitat 2.0: Training home assistants to rearrange their habitat (2022), https://arxiv.org/abs/2106.14405
-
[28]
Team, G., Anil, R., Borgeaud, S., et al.: Gemini: A family of highly capable mul- timodal models (2025),https://arxiv.org/abs/2312.11805
work page internal anchor Pith review Pith/arXiv arXiv 2025
- [29]
- [30]
-
[31]
worldlabs.ai/blog/marble-world-model
World Labs: Marble: A multimodal world model (11 2025),https : / / www . worldlabs.ai/blog/marble-world-model
2025
- [32]
- [33]
-
[34]
Zhang, Y., Tang, S.: The wanderings of odysseus in 3d scenes (2022),https: //arxiv.org/abs/2112.09251 18 Z. Xia et al. Appendix This appendix provides supplementary information, extended evaluations, and implementation specifics to further support the main text. Specifically, Sec. A offers a more detailed illustration of the Habitat-GS architecture, elab-...
-
[35]
rendering_quality: Visual fidelity (sharpness, blur, artifacts, texture quality, g eometry consistency)
-
[36]
realism: How realistic and natural the rendered scene looks compared wit h real-world scenes
-
[37]
images": [ {
scene_diversity: How distinct this image is compared with the other 9 images in this same batch (layout variety, scene types, objects, visual appearance variety). Important constraints: 30 Z. Xia et al. - Do NOT infer or mention rendering methods, engines, or dataset names. - Do NOT output markdown. Return strict JSON only. Required JSON format: { "images...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.