Lipschitz Optimization for Formal Verification of Homographies
Pith reviewed 2026-05-25 04:55 UTC · model grok-4.3
The pith
A closed-form homography mapping from camera pose to pixels allows Lipschitz optimization to produce tight linear bounds for verifying neural network robustness to 3D motion.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By establishing a closed-form mapping from camera pose to pixel values through homographies and analyzing their continuity properties, recent Lipschitz optimization and piecewise continuity results can be extended to derive tight linear bounds on perturbed pixel values, enabling formal verification of robustness against 3D motion perturbations for scenes with predominantly planar structure.
What carries the argument
Closed-form homography mapping from camera pose to pixel values, extended via its continuity properties to support Lipschitz optimization for linear bounds on perturbations.
If this is right
- Formal verification becomes possible for projective geometry transforms without complex simulation or explicit image-formation models.
- The method yields up to 89 percent speedup and 7 percent tighter bounds compared with prior work.
- Evaluation on the VNN-COMP benchmark reveals systematic weaknesses of networks to projective perturbations.
- A real-world runway classifier case study demonstrates practical vulnerabilities to camera motion.
Where Pith is reading between the lines
- The same continuity analysis could be tested on other geometric transforms such as affine or perspective mappings beyond homographies.
- Integration with existing neural network verifiers might allow combined checks for both lp-norm and motion perturbations.
- The bounds could serve as a basis for generating adversarial camera poses in training loops for improved robustness.
Load-bearing premise
Scenes have predominantly planar structure so that homographies provide an accurate closed-form mapping from camera pose to pixel values.
What would settle it
A concrete counterexample in which actual pixel changes under small camera pose perturbations exceed the derived linear bounds for a planar scene.
Figures












read the original abstract
The adoption of vision neural networks in regulated industries requires formal robustness guarantees, especially in safety-critical domains such as healthcare, autonomous vehicles, and aerospace. However, current approaches are confined to incomplete statistical verification or robustness to $\ell_p$-norm and affine transforms, which cover only a narrow subset of perturbations to the image formation process. In particular, robustness to camera motion remains an open problem despite being key to deploy many vision applications. We present a formal verification approach that targets robustness against 3D motion perturbations of the capturing camera. We first establish a closed-form mapping from camera pose to pixel values. By analyzing the continuity properties of the resulting homographies, we show that recent work on Lipschitz optimization and piecewise continuity can be extended to derive tight linear bounds on perturbed pixel values. Our approach applies to scenes with predominantly planar structure, such as ground planes in augmented reality, road markings and traffic signs in autonomous driving, or planar workspaces in robotic manipulation. This enables the first formal verification of projective geometry transforms, without complex simulation, surrogate networks, or explicit image-formation models. We validate our implementation and show up to 89% speedup and 7% tighter bounds over prior work. We then evaluate our method on the VNN-COMP benchmark and reveal systematic weaknesses to projective perturbations. Finally, we demonstrate a real-world case study on a safety-critical runway classifier, highlighting practical vulnerabilities to camera motion, and addressing a key challenge in the certification of learned models. Data and code are publicly available at https://github.com/jeangud/homography-verification .
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to introduce the first formal verification method for neural network robustness under 3D camera motion perturbations on planar scenes. It derives a closed-form homography mapping from camera pose to pixel values, extends Lipschitz optimization using continuity properties to obtain tight linear bounds on perturbed pixels, and demonstrates the approach via implementation speedups, VNN-COMP evaluation revealing weaknesses to projective transforms, and a runway classifier case study.
Significance. If the central derivation holds, the result would be significant for safety-critical vision applications by providing sound bounds on projective transforms without simulation or surrogates. The public code release and real-world case study strengthen the contribution; reported gains of 89% speedup and 7% tighter bounds over prior work would indicate practical efficiency if substantiated.
major comments (2)
- [Abstract and §3] Abstract and §3 (bound derivation): the extension of Lipschitz optimization to homographies assumes the pose-to-pixel mapping is Lipschitz continuous over the perturbation domain. However, the projective division by the third homogeneous coordinate yields unbounded derivatives near singularities (grazing angles where the denominator approaches zero). The manuscript provides no explicit restriction of the perturbation set or proof that a finite Lipschitz constant exists on the chosen domain, which is load-bearing for the soundness of the linear bounds.
- [§5] §5 (VNN-COMP evaluation): the claim that the method reveals 'systematic weaknesses to projective perturbations' requires the specific perturbation ranges and network architectures used; without these, it is unclear whether the observed failures stem from the homography bounds or from the underlying Lipschitz optimizer.
minor comments (2)
- [§2] Notation for the homography matrix and pose parameters should be introduced with explicit definitions before the continuity analysis to improve readability.
- [Abstract] The abstract states 'up to 89% speedup and 7% tighter bounds' but does not specify the exact baseline implementations or the metric (e.g., bound width or verification time) used for the 7% figure.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive report. We address each major comment below and will revise the manuscript to strengthen the presentation and soundness arguments.
read point-by-point responses
-
Referee: [Abstract and §3] Abstract and §3 (bound derivation): the extension of Lipschitz optimization to homographies assumes the pose-to-pixel mapping is Lipschitz continuous over the perturbation domain. However, the projective division by the third homogeneous coordinate yields unbounded derivatives near singularities (grazing angles where the denominator approaches zero). The manuscript provides no explicit restriction of the perturbation set or proof that a finite Lipschitz constant exists on the chosen domain, which is load-bearing for the soundness of the linear bounds.
Authors: We agree that the Lipschitz property requires careful domain restriction. The manuscript analyzes continuity properties of homographies but does not explicitly bound the perturbation set away from singularities. We will revise §3 to add an explicit assumption that the perturbation domain is a compact set on which the third homogeneous coordinate is bounded below by a positive constant (ensuring no grazing angles), and we will include a short proof that the resulting mapping is Lipschitz continuous on this domain, with the constant obtained from the supremum of the Jacobian norm over the compact set. This restriction is consistent with the practical planar-scene scenarios considered in the paper. revision: yes
-
Referee: [§5] §5 (VNN-COMP evaluation): the claim that the method reveals 'systematic weaknesses to projective perturbations' requires the specific perturbation ranges and network architectures used; without these, it is unclear whether the observed failures stem from the homography bounds or from the underlying Lipschitz optimizer.
Authors: The specific perturbation ranges and network architectures are already stated in §5, but we acknowledge that they could be presented more prominently for clarity. We will revise §5 to include an explicit table or subsection listing the exact perturbation intervals (e.g., rotation and translation bounds), the VNN-COMP networks evaluated, and the precise failure criteria. This will make it unambiguous that the observed weaknesses arise from the inability of existing affine/ℓp methods to handle projective transforms rather than from the Lipschitz optimizer itself. revision: yes
Circularity Check
No significant circularity; derivation extends prior methods independently.
full rationale
The abstract and description present the core contribution as an extension of existing Lipschitz optimization and piecewise continuity results to homographies via analysis of their continuity properties for planar scenes. No equations or steps are shown that reduce a claimed prediction or first-principles result to a fitted parameter or self-citation by construction. The approach is described as applying established techniques to a new domain without redefining inputs in terms of outputs or relying on load-bearing self-citations for uniqueness. This is the common case of a self-contained extension with independent mathematical content.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Homographies exhibit continuity properties amenable to Lipschitz optimization and piecewise linear bounding.
Reference graph
Works this paper leans on
-
[1]
Roadmap for artificial in- telligence safety assurance
Federal Aviation Administration. Roadmap for artificial in- telligence safety assurance. Technical Report Version I, FAA, 2024. 31 pages. 7
work page 2024
-
[2]
EASA concept pa- per: Guidance for level 1 & 2 machine-learning applications
European Union Aviation Safety Agency. EASA concept pa- per: Guidance for level 1 & 2 machine-learning applications. Technical Report Issue 02, EASA, 2024. 7
work page 2024
-
[3]
The sample complexities of global Lipschitz opti- mization
Franc ¸ois Bachoc, Tommaso R Cesari, and S´ebastien Gerchi- novitz. The sample complexities of global Lipschitz opti- mization. hal-03129721v2, 2021. 4
work page 2021
-
[4]
Stanley Bak, Changliu Liu, and Taylor Johnson. The sec- ond international verification of neural networks competition (VNN-COMP 2021): Summary and results.arXiv preprint arXiv:2109.00498, 2021. 7
-
[5]
Neural network based runway landing guidance for general aviation au- toland
Giovanni Balduzzi, Martino Ferrari Bravo, Anna Chernova, Calin Cruceru, Luuk van Dijk, Peter de Lange, Juan Jerez, Nathana¨el Koehler, Mathias Koerner, Corentin Perret-Gentil, Zoltan Pillio, Ruben Polak, Hugo Silva, Romeo Valentin, Ian Whittington, and Grigory Yakushev. Neural network based runway landing guidance for general aviation au- toland. Technica...
work page 2021
-
[6]
Certifying geometric ro- bustness of neural networks
Mislav Balunovic, Maximilian Baader, Gagandeep Singh, Timon Gehr, and Martin Vechev. Certifying geometric ro- bustness of neural networks. InNeurIPS, 2019. 6, 8
work page 2019
-
[7]
Ben Batten, Yang Zheng, Alessandro De Palma, Panagiotis Kouvaros, and Alessio Lomuscio. Verification of geometric robustness of neural networks via piecewise linear approx- imation and Lipschitz optimisation. InECAI, pages 2362– 2369, 2024. 2, 3, 4, 5, 6, 7, 8
work page 2024
-
[8]
Efficient verification of ReLU- based neural networks via dependency analysis
Elena Botoeva, Panagiotis Kouvaros, Jan Kronqvist, Alessio Lomuscio, and Ruth Misener. Efficient verification of ReLU- based neural networks via dependency analysis. InAAAI Conference on Artificial Intelligence, 2020. 6, 8
work page 2020
-
[9]
Christopher Brix, Stanley Bak, Changliu Liu, and Taylor T Johnson. The fourth international verification of neural net- works competition (VNN-COMP 2023): Summary and re- sults. InCAV, 2023. 2, 6, 7, 8
work page 2023
-
[10]
Tom Bruls, Horia Porav, Lars Kunze, and Paul Newman. The right (angled) perspective: Improving the understanding of road scenes using boosted inverse perspective mapping. 2019 IEEE Intelligent Vehicles Symposium (IV), pages 302– 309, 2018. 8
work page 2019
-
[11]
Homography-based state estimation for autonomous UA V landing
Andres Chavez, Dalton L’Heureux, Nirmit Prabhakar, Matthew Clark, Wai-Leuk Law, and Richard J Prazenica. Homography-based state estimation for autonomous UA V landing. InAIAA Information Systems-AIAA Infotech@ Aerospace, 2017. 8
work page 2017
-
[12]
Long Chen, Wen Tang, and Nigel W John. Real-time geometry-aware augmented reality in minimally invasive surgery.Healthcare technology letters, 4(5):163–167, 2017. 8
work page 2017
-
[13]
Po- sition: Beyond robustness against single attack types.arXiv preprint arXiv:2405.01349, 2024
Sihui Dai, Chong Xiang, Tong Wu, and Prateek Mittal. Po- sition: Beyond robustness against single attack types.arXiv preprint arXiv:2405.01349, 2024. 8
-
[14]
LARD - Landing Approach Runway Detection - Dataset for Vision Based Landing
M ´elanie Ducoffe, Maxime Carrere, L ´eo F ´eliers, Adrien Gauffriau, Vincent Mussot, Claire Pagetti, and Thierry Sam- mour. LARD - Landing Approach Runway Detection - Dataset for Vision Based Landing. 2023. 2, 6, 7
work page 2023
-
[15]
Robustness of Rotation-Equivariant Networks to Adversarial Perturbations
Beranger Dumont, Simona Maggio, and Pablo Montalvo. Robustness of rotation-equivariant networks to adversarial perturbations.arXiv preprint arXiv:1802.06627, 2018. 8
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[16]
Exploring the landscape of spatial robustness
Logan Engstrom, Brandon Tran, Dimitris Tsipras, Ludwig Schmidt, and Aleksander Madry. Exploring the landscape of spatial robustness. InICML, 2019. 2, 8
work page 2019
-
[17]
Alhussein Fawzi, Seyed-Mohsen Moosavi-Dezfooli, and Pascal Frossard. The robustness of deep networks: A ge- ometrical perspective.IEEE Signal Processing Magazine, 34(6):50–62, 2017. 8
work page 2017
-
[18]
Fuzz testing based data augmentation to improve robustness of deep neural networks
Xiang Gao, Ripon K Saha, Mukul R Prasad, and Abhik Roy- choudhury. Fuzz testing based data augmentation to improve robustness of deep neural networks. InICSE, pages 1147–
-
[19]
Explaining and harnessing adversarial examples
Ian Goodfellow, Jonathon Shlens, and Christian Szegedy. Explaining and harnessing adversarial examples. InICLR,
-
[20]
Efficient verifica- tion of neural networks against LVM-based specifications
Harleen Hanspal and Alessio Lomuscio. Efficient verifica- tion of neural networks against LVM-based specifications. InCVPR, pages 3894–3903. IEEE, 2023. 8
work page 2023
-
[21]
Richard Hartley and Andrew Zisserman.Multiple view ge- ometry in computer vision. Cambridge University Press,
-
[22]
Lei Hsiung, Yun-Yun Tsai, Pin-Yu Chen, and Tsung-Yi Ho. Towards compositional adversarial robustness: Generalizing adversarial training to composite semantic perturbations. In CVPR, pages 24658–24667, 2023. 8
work page 2023
-
[23]
Robustness certification of visual perception models via camera motion smoothing
Hanjiang Hu, Zuxin Liu, Linyi Li, Jiacheng Zhu, and Ding Zhao. Robustness certification of visual perception models via camera motion smoothing. InCoRL, pages 1309–1320. PMLR, 2022. 8
work page 2022
-
[24]
Robustness ver- ification for perception models against camera motion per- turbations
Hanjiang Hu, Changliu Liu, and Ding Zhao. Robustness ver- ification for perception models against camera motion per- turbations. InICML Workshop on Formal Verification of Ma- chine Learning (WFVML), 2023. 8
work page 2023
-
[25]
Pixel-wise smoothing for certified robustness against camera motion perturbations
Hanjiang Hu, Zuxin Liu, Linyi Li, Jiacheng Zhu, and Ding Zhao. Pixel-wise smoothing for certified robustness against camera motion perturbations. InAISTATS, pages 217–225. PMLR, 2024. 2, 8
work page 2024
-
[26]
When deep learning meets polyhedral theory: A sur- vey.INFORMS Journal on Computing, 2026
Joey Huchette, Gonzalo Mu ˜noz, Thiago Serra, and Calvin Tsay. When deep learning meets polyhedral theory: A sur- vey.INFORMS Journal on Computing, 2026. 8
work page 2026
-
[27]
Towards Generalized Certified Robustness with Multi-Norm Training
Enyi Jiang and Gagandeep Singh. Towards Universal Cer- tified Robustness with Multi-Norm Training.arXiv preprint arXiv:2410.03000, 2024. 8
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[28]
Geometric robustness of deep networks: analysis and improvement
Can Kanbak, Seyed-Mohsen Moosavi-Dezfooli, and Pascal Frossard. Geometric robustness of deep networks: analysis and improvement. InCVPR, pages 4441–4449. IEEE, 2018. 8 9
work page 2018
-
[29]
Reluplex: An efficient SMT solver for verifying deep neural networks
Guy Katz, Clark Barrett, David L Dill, Kyle Julian, and Mykel J Kochenderfer. Reluplex: An efficient SMT solver for verifying deep neural networks. InCAV, pages 97–117. Springer, 2017. 8
work page 2017
-
[30]
Konstantin Kaulen, Tobias Ladner, Stanley Bak, Christopher Brix, Hai Duong, Thomas Flinkow, Taylor T Johnson, Lukas Koller, Edoardo Manino, ThanhVu H Nguyen, et al. The 6th international verification of neural networks competition (VNN-COMP 2025): Summary and results.arXiv preprint arXiv:2512.19007, 2025. 7
-
[31]
Formal Verification of CNN-based Perception Systems
Panagiotis Kouvaros and Alessio Lomuscio. Formal veri- fication of CNN-based perception systems.arXiv preprint arXiv:1811.11373, 2018. 8
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[32]
Deep learning.Nature, 521(7553):436–444, 2015
Yann LeCun, Yoshua Bengio, and Geoffrey Hinton. Deep learning.Nature, 521(7553):436–444, 2015. 2
work page 2015
-
[33]
SoK: Certified robustness for deep neural networks
Linyi Li, Tao Xie, and Bo Li. SoK: Certified robustness for deep neural networks. InIEEE Symposium on Security and Privacy, 2023. 2, 8
work page 2023
-
[34]
Changliu Liu, Tomer Arnon, Christopher Lazarus, Christo- pher Strong, Clark Barrett, Mykel J Kochenderfer, et al. Al- gorithms for verifying deep neural networks.Foundations and Trends in Optimization, 4(3-4):244–404, 2021. 8
work page 2021
-
[35]
Vision-centric BEV perception: A survey.IEEE TPAMI, 2024
Yuexin Ma, Tai Wang, Xuyang Bai, Huitong Yang, Yuenan Hou, Yaming Wang, Yu Qiao, Ruigang Yang, and Xinge Zhu. Vision-centric BEV perception: A survey.IEEE TPAMI, 2024. 8
work page 2024
-
[36]
Global optimization of Lipschitz functions
C ´edric Malherbe and Nicolas Vayatis. Global optimization of Lipschitz functions. InICML, pages 2314–2323. PMLR,
-
[37]
Is certifyingℓ p robustness still worthwhile?arXiv preprint arXiv:2310.09361, 2023
Ravi Mangal, Klas Leino, Zifan Wang, Kai Hu, Weicheng Yu, Corina Pasareanu, Anupam Datta, and Matt Fredrikson. Is certifyingℓ p robustness still worthwhile?arXiv preprint arXiv:2310.09361, 2023. 2, 8
-
[38]
Universal adversarial perturba- tions
Seyed-Mohsen Moosavi-Dezfooli, Alhussein Fawzi, Omar Fawzi, and Pascal Frossard. Universal adversarial perturba- tions. InCVPR. IEEE, 2017. 8
work page 2017
-
[39]
Robert J. Moss, Mykel J. Kochenderfer, Maxime Gariel, and Arthur Dubois. Bayesian safety validation for failure prob- ability estimation of black-box systems.AIAA Journal of Aerospace Information Systems (JAIS), 2024. 2, 8
work page 2024
-
[40]
Reachability analysis of deep neural networks with provable guarantees
Wenjie Ruan, Xiaowei Huang, and Marta Kwiatkowska. Reachability analysis of deep neural networks with provable guarantees. InIJCAI, 2018. 8
work page 2018
-
[41]
Mohammad Sefidgar and Rene Landry Jr. Landing system development based on inverse homography range camera fu- sion (IHRCF).Sensors, 22(5):1870, 2022. 8
work page 2022
-
[42]
Neural network verification with branch-and-bound for general nonlinearities
Zhouxing Shi, Qirui Jin, Zico Kolter, Suman Jana, Cho- Jui Hsieh, and Huan Zhang. Neural network verification with branch-and-bound for general nonlinearities. InTACAS, pages 315–335, 2025. 8
work page 2025
-
[43]
An abstract domain for certifying neural networks
Gagandeep Singh, Timon Gehr, Markus P ¨uschel, and Martin Vechev. An abstract domain for certifying neural networks. PACMPL, 3(POPL):1–30, 2019. 2, 8
work page 2019
-
[44]
Aman Sinha, Hongseok Namkoong, Riccardo V olpi, and John Duchi. Certifying some distributional robustness with principled adversarial training.arXiv preprint arXiv:1710.10571, 2017. 8
-
[45]
In- triguing properties of neural networks
Christian Szegedy, Wojciech Zaremba, Ilya Sutskever, Joan Bruna, Dumitru Erhan, Ian Goodfellow, and Rob Fergus. In- triguing properties of neural networks. InICLR, 2014. 2, 8
work page 2014
-
[46]
Roger Y Tsai, Reimar K Lenz, et al. A new technique for fully autonomous and efficient 3D robotics hand/eye calibra- tion.IEEE Transactions on Robotics and Automation, 5(3): 345–358, 1989. 8
work page 1989
-
[47]
Fu Wang, Peipei Xu, Wenjie Ruan, and Xiaowei Huang. To- wards verifying the geometric robustness of large-scale neu- ral networks.Proceedings of the AAAI conference on AI,
-
[48]
Art-point: Im- proving rotation robustness of point cloud classifiers via ad- versarial rotation
Ruibin Wang, Yibo Yang, and Dacheng Tao. Art-point: Im- proving rotation robustness of point cloud classifiers via ad- versarial rotation. InProceedings of the IEEE/CVF Confer- ence on Computer Vision and Pattern Recognition, 2022. 8
work page 2022
-
[49]
Shiqi Wang, Huan Zhang, Kaidi Xu, Xue Lin, Suman Jana, Cho-Jui Hsieh, and J Zico Kolter. Beta-CROWN: Efficient bound propagation with per-neuron split constraints for com- plete and incomplete neural network verification.NeurIPS, 34, 2021. 8
work page 2021
-
[50]
Deobfuscating machine learning assurance and approval
Kimberly Wasson and Robert V oros. Deobfuscating machine learning assurance and approval. In43rd Digital Avionics Systems Conference (DASC), pages 1–10. IEEE, 2024. 2
work page 2024
-
[51]
Toward certified ro- bustness against real-world distribution shifts
Haoze Wu, Teruhiro Tagomori, Alexander Robey, Fengjun Yang, Nikolai Matni, George Pappas, Hamed Hassani, Co- rina Pasareanu, and Clark Barrett. Toward certified ro- bustness against real-world distribution shifts. InIEEE Conference on Secure and Trustworthy Machine Learning (SaTML), pages 537–553. IEEE, 2023. 8
work page 2023
-
[52]
Marabou 2.0: a versatile formal analyzer of neural networks
Haoze Wu, Omri Isac, Aleksandar Zelji ´c, Teruhiro Tago- mori, Matthew Daggitt, Wen Kokke, Idan Refaeli, Guy Amir, Kyle Julian, Shahaf Bassan, et al. Marabou 2.0: a versatile formal analyzer of neural networks. InCAV, pages 249–264. Springer, 2024. 7, 8
work page 2024
-
[53]
Spatially Transformed Adversarial Examples
Chaowei Xiao, Jun-Yan Zhu, Bo Li, Warren He, Mingyan Liu, and Dawn Song. Spatially transformed adversarial ex- amples.arXiv preprint arXiv:1801.02612, 2018. 8
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[54]
Automatic perturbation analysis for scalable certified robustness and beyond
Kaidi Xu, Zhouxing Shi, Huan Zhang, Yihan Wang, Kai- Wei Chang, Minlie Huang, Bhavya Kailkhura, Xue Lin, and Cho-Jui Hsieh. Automatic perturbation analysis for scalable certified robustness and beyond. InNeurIPS, pages 1129– 1141, 2020. 8
work page 2020
-
[55]
Kaidi Xu, Huan Zhang, Shiqi Wang, Yihan Wang, Suman Jana, Xue Lin, and Cho-Jui Hsieh. Fast and Complete: En- abling complete neural network verification with rapid and massively parallel incomplete verifiers. InICLR, 2021. 7, 8
work page 2021
-
[56]
Provable defense against geometric transformations
Rem Yang, Jacob Laurel, Sasa Misailovic, and Gagandeep Singh. Provable defense against geometric transformations. InICLR, 2023. 8
work page 2023
-
[57]
Efficient neural network robustness certi- fication with general activation functions
Huan Zhang, Tsui-Wei Weng, Pin-Yu Chen, Cho-Jui Hsieh, and Luca Daniel. Efficient neural network robustness certi- fication with general activation functions. pages 4939–4948,
-
[58]
General cutting planes for bound-propagation-based neural network verifica- tion
Huan Zhang, Shiqi Wang, Kaidi Xu, Linyi Li, Bo Li, Suman Jana, Cho-Jui Hsieh, and J Zico Kolter. General cutting planes for bound-propagation-based neural network verifica- tion. InNeurIPS, pages 1656–1670, 2022. 8 10 Lipschitz Optimization for Formal Verification of Homographies Supplementary Material
work page 2022
-
[59]
Notation ≜Equality by definition J1, nKSet of natural integers between1andn, both included A,B,C, . . .Sets (cursive script) Diff (B)Subset ofBwhere the bound errorf is differentiable f ∗ Optimum value (maximum or minimum) of functionf cf ∗ Estimate off ∗ Gx0 i,j (κ)Value of pixel(i, j)in the transformed image, when imagex 0 is transformed byκ xVectors, w...
-
[60]
Sample images from each dataset
Datasets MNIST CIF AR10 GTSRB LARD Figure 6. Sample images from each dataset
-
[61]
In this case, bilinear interpolation relies on padding mechanisms to impute missing pixel values
Padding Geometric transformations frequently map target coordinates beyond the boundaries of the source image. In this case, bilinear interpolation relies on padding mechanisms to impute missing pixel values. Depending on the application, different padding 1 techniques exist, with varying levels of complexity and realism. For the traffic sign of Fig. 7, “...
-
[62]
Transforms glossary We detail a few scenarios that simplify the general homography form given in Eq. (7). Under our assumptions, we show that some of these scenarios simplify into exact affine transforms. We also notice that rotation perturbations are independent of the pose of the initial viewpoint. For brevity of the translation cases, we simplify furth...
-
[63]
Full closed-form expressions We detail here the remaining closed-form expressions needed in Eq. (7). Note that the roll, pitch, yaw angles are not defined in the camera frame(C)(x-right,y-down,z-forward), but in a body frame(B)withx-forward,y-right,z-down. The transform T CAM BODY is thus needed to obtain the correct transforms. There is no translation be...
-
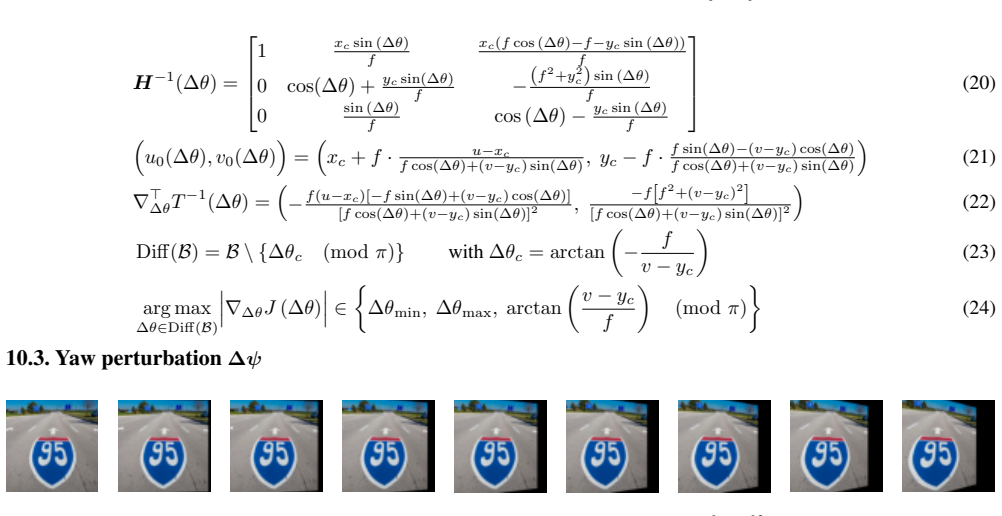
[64]
Example: yaw deviation∆ψ For the yaw deviation example, we set the pose of the first camera (i.e.ϕ, θ, ψ, x, y, z) to be arbitrary, and set∆ϕ= ∆θ= ∆x= ∆y= ∆z= 0so that only the yaw deviation∆ψexplains the motion from first to second viewpoint. In this context, t=0and Eq. (7) reduces to the special caseH(∆ψ) =K·R·K −1, valid even if scene points are not co...
-
[65]
Maximization of|∇ κJ| In [7], an upper bound on the Lipschitz constant is estimated assup κ∈Diff(B) ∇⊤ κ J(κ)·e m for coordinatem. We justify here the maximization of the independent components for the case where there is only one transform parameter(m= 1): |∇κJ(κ)|≜|∇ κ [LB(κ)−G(κ)]|(55) ≜ ∇κ max j∈J1,qK w⊤ j κ+b j −G(κ) (56) ≤ ∇κ max j∈J1,qK w⊤ j κ+b j ...
-
[66]
Upper bound locations for gradient|∇ ∆ψT −1| In the yaw perturbation example, we follow Sec. 13 and derive a majorant for the gradient of the inverse transform ∇⊤ ∆ψT −1 , more particularly along each coordinate by maximizing ∂u0 ∂∆ψ and ∂v0 ∂∆ψ independently. u-coordinate.We study the variations of the gradient ∂u0 ∂∆ψ given by Eq. (12). We compute its d...
-
[67]
[7] proposes to usefbound =f κ1+κ2 2 + L 2 (κ2 −κ 1)
Derivation off bound By considering the subdomain midpoint, Equation 18 in Batten et al. [7] proposes to usefbound =f κ1+κ2 2 + L 2 (κ2 −κ 1). In our implementation, we propose a slightly different bound by working rather with the subdomain extremities. Letκ∈ [κ1, κ2]⊂R. Using the Lipschitz property off, we derive the following bound forf(κ): ( f(κ)≤f(κ 1...
-
[68]
Models To verify robustness against the VNN datasets [9], we use the official benchmark networks available from the competition repositories athttps://github.com/VNN- COMP(see Tab. 5). There is no existing VNN benchmark for runway visibility, so we train a custom runway classifier on the LARD dataset [14], network and training details are given below. 7 D...
work page 2021
-
[69]
Extended results To complete Tab. 2, this section presents extended robustness results on additional networks of the VNN-COMP benchmarks. We indicate the number of timeouts in brackets, if any. A high number of timeouts indicates a potential need to increase the timeout limit and leave more time for the verifier to output a certified result. Perturbation ...
work page 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.