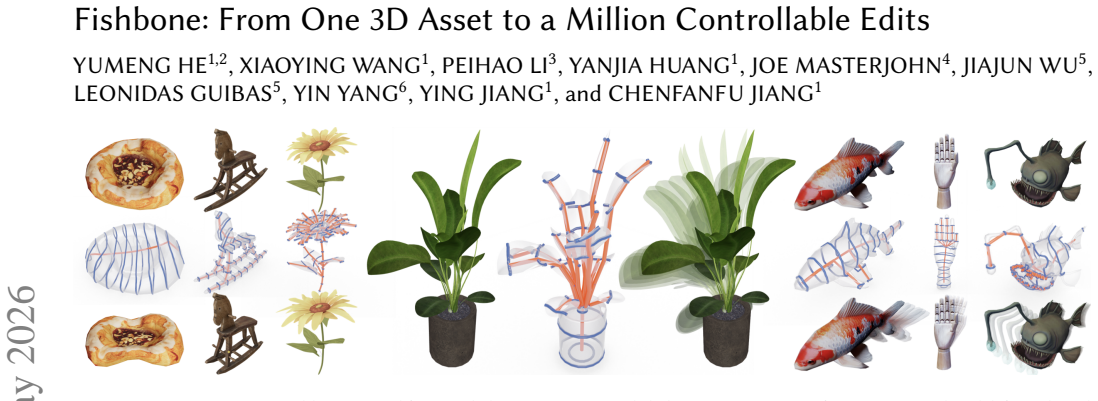
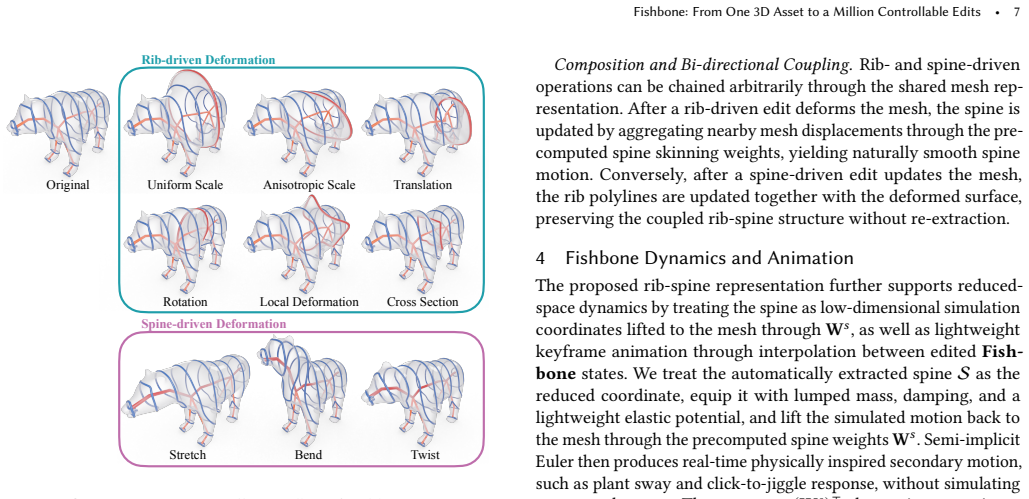
Fishbone: From One 3D Asset to a Million Controllable Edits
Pith reviewed 2026-06-30 12:26 UTC · model grok-4.3
The pith
Fishbone turns any input 3D mesh into a rib-spine structure that lets ribs adjust local thickness and orientation while the spine governs global bends and twists for real-time deformation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
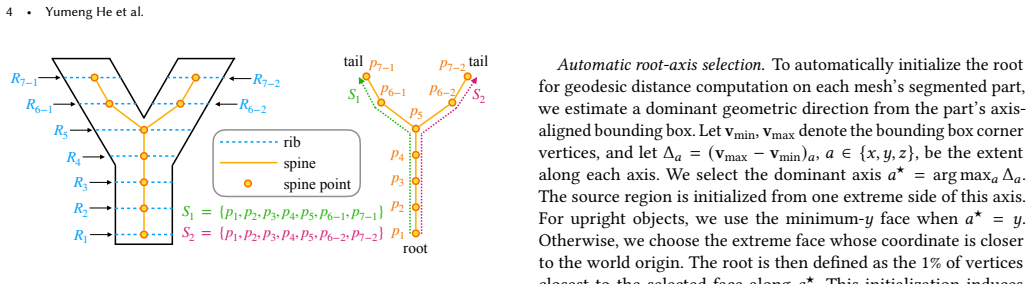
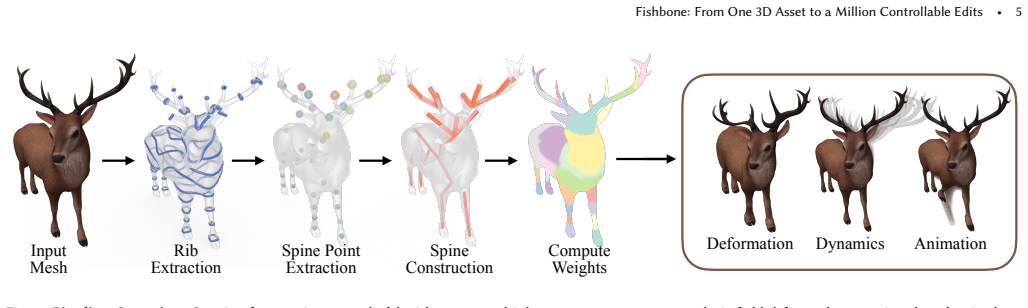
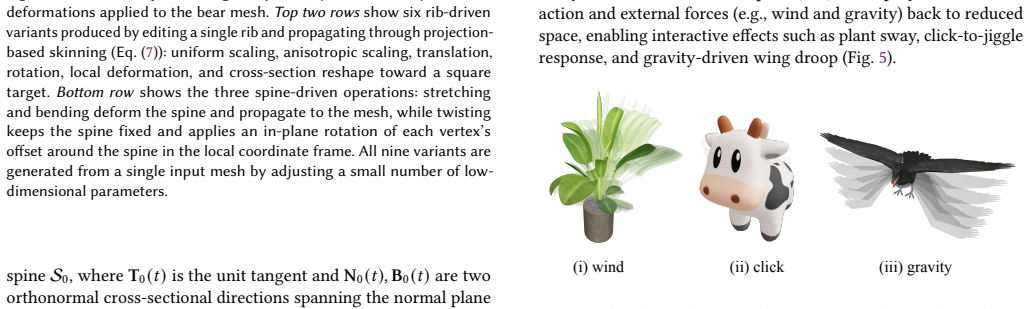
Given an input mesh, Fishbone computes a geodesic scalar field with an adaptive heat method, extracts iso-contours as cross-sectional ribs, constructs a smooth geometry-aware spine through rib centers, and associates surface vertices with nearby rib and spine structures using Gaussian-weighted skinning. The resulting representation enables real-time and predictable deformation: ribs control local profiles such as thickness, orientation, and cross-sectional variation, while the spine controls global bending, twisting, and stretching.
What carries the argument
The rib-spine representation formed by iso-contour ribs from a geodesic scalar field, a spine through rib centers, and Gaussian-weighted skinning that ties mesh vertices to these controls.
Load-bearing premise
That the geodesic scalar field computed with the adaptive heat method, followed by iso-contour extraction and rib-center spine construction, will produce a meaningful and general-purpose control structure for arbitrary input meshes without category-specific tuning.
What would settle it
Running the extraction on a mesh with sharp mechanical features or thin handles and measuring whether scaling a single rib by 20 percent produces only the expected local thickness change without unintended global twisting or vertex collapse.
Figures


read the original abstract
Large-scale controllable 3D assets are critical for computer graphics, embodied AI, robotics, and interactive content creation, yet creating diverse 3D assets remains challenging due to the high cost of manual modeling and rigging. Shape deformation offers a natural way to generate variations from existing meshes, but existing data-driven methods often rely on sparse user inputs, while parametric editing frameworks require manually designed control structures and category-specific configurations. Inspired by natural creatures, where a central spine governs global shape and cross-sectional ribs control local variation, we introduce Fishbone, a unified rib-spine representation for general shapes that supports controllable parametric mesh deformation, reduced-space dynamics, and animation. Given an input mesh, Fishbone computes a geodesic scalar field with an adaptive heat method, extracts iso-contours as cross-sectional ribs, constructs a smooth geometry-aware spine through rib centers, and associates surface vertices with nearby rib and spine structures using Gaussian-weighted skinning. The resulting representation enables real-time and predictable deformation: ribs control local profiles such as thickness, orientation, and cross-sectional variation, while the spine controls global bending, twisting, and stretching. The same structure also supports reduced-space simulation and keyframe animation. We further construct Fishbone-136K by augmenting Hunyuan3D with rib-spine structures, and demonstrate applications in controllable 3D generation, deformation-based data augmentation for robot learning, interactive mesh editing, and agentic generation. Experiments demonstrate the effectiveness, efficiency, and versatility of the proposed framework.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Fishbone, a rib-spine representation for general 3D meshes. Given an input mesh, it computes a geodesic scalar field via an adaptive heat method, extracts iso-contours as cross-sectional ribs, constructs a smooth spine through rib centers, and applies Gaussian-weighted skinning to associate vertices. Ribs control local thickness/orientation/variation while the spine controls global bending/twisting/stretching, enabling real-time predictable deformation, reduced-space simulation, and animation. The authors augment Hunyuan3D to create the Fishbone-136K dataset and demonstrate uses in controllable 3D generation, robot learning data augmentation, interactive editing, and agentic generation.
Significance. If the representation produces valid, non-intersecting ribs and a stable spine for arbitrary meshes, the approach would offer a notable advance over manual rigging or category-specific parametric models by providing an automatic, general-purpose control structure for deformation and animation. The large-scale dataset and breadth of demonstrated applications would further increase its utility in graphics, embodied AI, and robotics.
major comments (1)
- [Abstract] Abstract (pipeline description): the construction (adaptive heat method geodesic field → iso-contour ribs → rib-center spine → Gaussian skinning) is presented as applying to 'general shapes' and 'arbitrary input meshes,' yet the method implicitly assumes dominant tubular topology with a single source; no handling is described for branching, multiple medial axes, genus >0, or disconnected components. If iso-contours fail to close or the spine becomes ill-defined, the 'real-time and predictable deformation' guarantee does not hold without per-mesh tuning.
Simulated Author's Rebuttal
We thank the referee for the constructive comment on the scope and assumptions of our method. We provide a point-by-point response below.
read point-by-point responses
-
Referee: [Abstract] Abstract (pipeline description): the construction (adaptive heat method geodesic field → iso-contour ribs → rib-center spine → Gaussian skinning) is presented as applying to 'general shapes' and 'arbitrary input meshes,' yet the method implicitly assumes dominant tubular topology with a single source; no handling is described for branching, multiple medial axes, genus >0, or disconnected components. If iso-contours fail to close or the spine becomes ill-defined, the 'real-time and predictable deformation' guarantee does not hold without per-mesh tuning.
Authors: The referee correctly identifies that our method relies on a dominant tubular topology with a single source for the geodesic field computation. The adaptive heat method and subsequent iso-contour extraction are designed under this assumption, as inspired by biological structures with a central spine. We do not claim or provide handling for branching topologies, multiple medial axes, genus greater than zero, or disconnected components in the current work. In cases where iso-contours fail to close or the spine is ill-defined, the deformation may require manual tuning. To address this, we will revise the abstract to remove the overgeneralization to 'arbitrary input meshes' and instead specify 'shapes with dominant tubular topology'. We will also add a limitations paragraph in the manuscript discussing these topological assumptions and potential failure modes. revision: yes
Circularity Check
No circularity: forward constructive pipeline from mesh to rib-spine structure
full rationale
The paper presents a procedural algorithm that takes an input mesh and computes a geodesic scalar field (adaptive heat method), extracts iso-contours as ribs, builds a spine from rib centers, and applies Gaussian skinning. No equations, fitted parameters, or predictions are defined in terms of the outputs; the central claim is a self-contained construction with no self-citation chains, ansatzes smuggled via prior work, or renaming of known results. The derivation chain does not reduce to its inputs by construction.
Axiom & Free-Parameter Ledger
invented entities (1)
-
Fishbone rib-spine representation
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Hervé Abdi and Lynne J Williams. 2010. Principal component analysis.Wiley interdisciplinary reviews: computational statistics2, 4 (2010), 433–459
2010
-
[2]
Ilge Akkaya, Marcin Andrychowicz, Maciek Chociej, Mateusz Litwin, Bob Mc- Grew, Arthur Petron, Alex Paino, Matthias Plappert, Glenn Powell, Raphael Ribas, et al. 2019. Solving rubik’s cube with a robot hand.arXiv preprint arXiv:1910.07113 (2019)
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[3]
Nina Amenta, Sunghee Choi, and Ravi Krishna Kolluri. 2001. The power crust. InProceedings of the sixth ACM symposium on Solid modeling and applications. 249–266
2001
-
[4]
Oscar Kin-Chung Au, Chiew-Lan Tai, Hung-Kuo Chu, Daniel Cohen-Or, and Tong-Yee Lee. 2008. Skeleton extraction by mesh contraction.ACM transactions on graphics (TOG)27, 3 (2008), 1–10
2008
-
[5]
Ilya Baran and Jovan Popović. 2007. Automatic rigging and animation of 3d characters.ACM Transactions on graphics (TOG)26, 3 (2007), 72–es
2007
-
[6]
Jernej Barbič and Doug L James. 2005. Real-time subspace integration for St. Venant-Kirchhoff deformable models.ACM transactions on graphics (TOG)24, 3 (2005), 982–990
2005
-
[7]
Miklós Bergou, Max Wardetzky, Stephen Robinson, Basile Audoly, and Eitan Grinspun. 2008. Discrete elastic rods. InACM Siggraph 2008 Papers. 1–12
2008
-
[8]
Volker Blanz and Thomas Vetter. 2023. A morphable model for the synthesis of 3D faces. InSeminal Graphics Papers: Pushing the Boundaries, Volume 2. 157–164
2023
-
[9]
Sofien Bouaziz, Sebastian Martin, Tiantian Liu, Ladislav Kavan, and Mark Pauly
-
[10]
In Seminal Graphics Papers: Pushing the Boundaries, Volume 2
Projective dynamics: Fusing constraint projections for fast simulation. In Seminal Graphics Papers: Pushing the Boundaries, Volume 2. 787–797
-
[11]
Hyeong In Choi, Sung Woo Choi, and Hwan Pyo Moon. 1997. Mathematical theory of medial axis transform.pacific journal of mathematics181, 1 (1997), 57–88
1997
-
[12]
Min Gyu Choi and Hyeong-Seok Ko. 2005. Modal warping: Real-time simulation of large rotational deformation and manipulation.IEEE Transactions on Visualization & Computer Graphics11, 01 (2005), 91–101
2005
-
[13]
Sabine Coquillart. 1990. Extended free-form deformation: A sculpturing tool for 3D geometric modeling. InProceedings of the 17th annual conference on Computer graphics and interactive techniques. 187–196
1990
-
[14]
Keenan Crane, Clarisse Weischedel, and Max Wardetzky. 2013. Geodesics in heat: A new approach to computing distance based on heat flow.ACM Transactions on Graphics (ToG)32, 5 (2013), 1–11
2013
- [15]
-
[16]
Mark Foskey, Maxim Garber, Ming C Lin, and Dinesh Manocha. 2001. A Voronoi- based hybrid motion planner. InProceedings 2001 IEEE/RSJ International Confer- ence on Intelligent Robots and Systems. Expanding the Societal Role of Robotics in the the Next Millennium (Cat. No. 01CH37180), Vol. 1. IEEE, 55–60
2001
-
[17]
Lawson Fulton, Vismay Modi, David Duvenaud, David IW Levin, and Alec Jacob- son. 2019. Latent-space dynamics for reduced deformable simulation. InComputer graphics forum, Vol. 38. Wiley Online Library, 379–391
2019
-
[18]
William Gao, Noam Aigerman, Thibault Groueix, Vova Kim, and Rana Hanocka
-
[19]
InACM SIG- GRAPH 2023 conference proceedings
Textdeformer: Geometry manipulation using text guidance. InACM SIG- GRAPH 2023 conference proceedings. 1–11
2023
-
[20]
Minghao Guo, Bohan Wang, and Wojciech Matusik. 2024. Medial skeletal diagram: A generalized medial axis approach for compact 3d shape representation.ACM Transactions on Graphics (TOG)43, 6 (2024), 1–23
2024
-
[21]
Ernst Hairer, Marlis Hochbruck, Arieh Iserles, and Christian Lubich. 2006. Geo- metric numerical integration.Oberwolfach Reports3, 1 (2006), 805–882
2006
-
[22]
Xiaoguang Han, Chang Gao, and Yizhou Yu. 2017. DeepSketch2Face: a deep learning based sketching system for 3D face and caricature modeling.ACM Transactions on graphics (TOG)36, 4 (2017), 1–12
2017
-
[23]
Rana Hanocka, Noa Fish, Zhenhua Wang, Raja Giryes, Shachar Fleishman, and Daniel Cohen-Or. 2018. Alignet: Partial-shape agnostic alignment via unsuper- vised learning.ACM Transactions on Graphics (TOG)38, 1 (2018), 1–14
2018
-
[24]
Hui Huang, Shihao Wu, Daniel Cohen-Or, Minglun Gong, Hao Zhang, Guiqing Li, and Baoquan Chen. 2013. L1-medial skeleton of point cloud.ACM Trans. Graph. 32, 4 (2013), 65–1
2013
-
[25]
Takeo Igarashi, Satoshi Matsuoka, and Hidehiko Tanaka. 2006. Teddy: a sketching interface for 3D freeform design. InACM SIGGRAPH 2006 Courses. 11–es
2006
-
[26]
Pushkar Joshi, Mark Meyer, Tony DeRose, Brian Green, and Tom Sanocki. 2007. Harmonic coordinates for character articulation.ACM transactions on graphics (TOG)26, 3 (2007), 71–es
2007
-
[27]
Tao Ju, Scott Schaefer, and Joe Warren. 2023. Mean value coordinates for closed triangular meshes. InSeminal Graphics Papers: Pushing the Boundaries, Volume 2. 223–228
2023
-
[28]
Heewoo Jun and Alex Nichol. 2023. Shap-e: Generating conditional 3d implicit functions.arXiv preprint arXiv:2305.02463(2023)
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[29]
Ladislav Kavan, Steven Collins, Jiří Žára, and Carol O’Sullivan. 2007. Skinning with dual quaternions. InProceedings of the 2007 symposium on Interactive 3D graphics and games. 39–46
2007
-
[30]
Theodore Kim and Doug L James. 2011. Physics-based character skinning us- ing multi-domain subspace deformations. InProceedings of the 2011 ACM SIG- GRAPH/eurographics symposium on computer animation. 63–72
2011
-
[31]
Doris HU Kochanek and Richard H Bartels. 1984. Interpolating splines with local tension, continuity, and bias control. InProceedings of the 11th annual conference on Computer graphics and interactive techniques. 33–41
1984
-
[32]
John Lasseter. 1998. Principles of traditional animation applied to 3D computer animation. InSeminal graphics: pioneering efforts that shaped the field. 263–272
1998
-
[33]
Mingi Lee, Dongsu Zhang, Clément Jambon, and Young Min Kim. 2025. Brepdiff: Single-stage b-rep diffusion model. InProceedings of the Special Interest Group on Computer Graphics and Interactive Techniques Conference Conference Papers. 1–11
2025
-
[34]
Sergey Levine, Chelsea Finn, Trevor Darrell, and Pieter Abbeel. 2016. End-to-end training of deep visuomotor policies.Journal of Machine Learning Research17, 39 (2016), 1–40
2016
-
[35]
John P Lewis, Matt Cordner, and Nickson Fong. 2023. Pose space deformation: a unified approach to shape interpolation and skeleton-driven deformation. In Seminal Graphics Papers: Pushing the Boundaries, Volume 2. 811–818
2023
- [36]
-
[37]
Yaron Lipman, David Levin, and Daniel Cohen-Or. 2008. Green coordinates.ACM transactions on graphics (TOG)27, 3 (2008), 1–10
2008
-
[38]
Anran Liu, Cheng Lin, Yuan Liu, Xiaoxiao Long, Zhiyang Dou, Hao-Xiang Guo, Ping Luo, and Wenping Wang. 2024. Part123: Part-aware 3D Reconstruction from a Single-view Image. InACM SIGGRAPH 2024 Conference Papers. 1–12
2024
-
[39]
Richard Liu, Daniel Fu, Noah Tan, Itai Lang, and Rana Hanocka. 2025. WIR3D: Visually-Informed and Geometry-Aware 3D Shape Abstraction. InProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV)
2025
- [40]
-
[41]
Matthew Loper, Naureen Mahmood, Javier Romero, Gerard Pons-Moll, and Michael J Black. 2023. SMPL: A skinned multi-person linear model. InSem- inal Graphics Papers: Pushing the Boundaries, Volume 2. 851–866
2023
-
[42]
Shitong Luo and Wei Hu. 2021. Diffusion probabilistic models for 3d point cloud generation. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition. 2837–2845
2021
-
[43]
Nadia Magnenat-Thalmann, Richard Laperrière, and Daniel Thalmann. 1989. Joint-dependent local deformations for hand animation and object grasping. In Proceedings on Graphics interface’88. 26–33
1989
-
[44]
Mark Meyer, Mathieu Desbrun, Peter Schröder, and Alan H Barr. 2003. Discrete differential-geometry operators for triangulated 2-manifolds. InVisualization and mathematics III. Springer, 35–57
2003
-
[45]
Niloy J Mitra, Michael Wand, Hao Zhang, Daniel Cohen-Or, Vladimir Kim, and Qi-Xing Huang. 2014. Structure-aware shape processing. InACM SIGGRAPH 2014 Courses. 1–21
2014
-
[46]
Alex Nichol, Heewoo Jun, Prafulla Dhariwal, Pamela Mishkin, and Mark Chen
-
[47]
Point-E: A System for Generating 3D Point Clouds from Complex Prompts
Point-e: A system for generating 3d point clouds from complex prompts. arXiv preprint arXiv:2212.08751(2022)
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[48]
Xue Bin Peng, Marcin Andrychowicz, Wojciech Zaremba, and Pieter Abbeel. 2018. Sim-to-real transfer of robotic control with dynamics randomization. In2018 IEEE international conference on robotics and automation (ICRA). IEEE, 3803–3810
2018
-
[49]
Alex Pentland and John Williams. 1989. Good vibrations: Modal dynamics for graphics and animation. InProceedings of the 16th annual conference on Computer graphics and interactive techniques. 215–222
1989
-
[50]
Ben Poole, Ajay Jain, Jonathan T Barron, and Ben Mildenhall. 2022. Dreamfusion: Text-to-3d using 2d diffusion.arXiv preprint arXiv:2209.14988(2022)
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[51]
1896.The theory of sound
John William Strutt Baron Rayleigh. 1896.The theory of sound. Vol. 2. Macmillan
-
[52]
Fereshteh Sadeghi and Sergey Levine. 2016. Cad2rl: Real single-image flight without a single real image.arXiv preprint arXiv:1611.04201(2016)
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[53]
Thomas W Sederberg and Scott R Parry. 1986. Free-form deformation of solid geometric models. InProceedings of the 13th annual conference on Computer graphics and interactive techniques. 151–160
1986
-
[54]
James A Sethian. 1999. Fast marching methods.SIAM review41, 2 (1999), 199–235. 18•Yumeng He et al
1999
-
[55]
Karan Singh and Eugene Fiume. 1998. Wires: a geometric deformation technique. InProceedings of the 25th annual conference on Computer graphics and interactive techniques. 405–414
1998
-
[56]
Olga Sorkine, Marc Alexa, et al. 2007. As-rigid-as-possible surface modeling. In Symposium on Geometry processing, Vol. 4. 109–116
2007
-
[57]
Vitaly Surazhsky, Tatiana Surazhsky, Danil Kirsanov, Steven J Gortler, and Hugues Hoppe. 2005. Fast exact and approximate geodesics on meshes.ACM transactions on graphics (TOG)24, 3 (2005), 553–560
2005
-
[58]
Andrea Tagliasacchi, Ibraheem Alhashim, Matt Olson, and Hao Zhang. 2012. Mean curvature skeletons. InComputer Graphics Forum, Vol. 31. Wiley Online Library, 1735–1744
2012
-
[59]
Andrea Tagliasacchi, Thomas Delame, Michela Spagnuolo, Nina Amenta, and Alexandru Telea. 2016. 3d skeletons: A state-of-the-art report. InComputer Graphics Forum, Vol. 35. Wiley Online Library, 573–597
2016
-
[60]
Andrea Tagliasacchi, Hao Zhang, and Daniel Cohen-Or. 2009. Curve skeleton extraction from incomplete point cloud. InACM Siggraph 2009 Papers. 1–9
2009
-
[61]
Qingyang Tan, Lin Gao, Yu-Kun Lai, Jie Yang, and Shihong Xia. 2018. Mesh-based autoencoders for localized deformation component analysis. InProceedings of the AAAI conference on artificial intelligence, Vol. 32
2018
-
[62]
Jiaxiang Tang, Ruijie Lu, Max Li, Zekun Hao, Xuan Li, Fangyin Wei, Shuran Song, Gang Zeng, Ming-Yu Liu, and Tsung-Yi Lin. 2026. Efficient part-level 3d object generation via dual volume packing.Advances in Neural Information Processing Systems38 (2026), 27115–27137
2026
-
[63]
Josh Tobin, Rachel Fong, Alex Ray, Jonas Schneider, Wojciech Zaremba, and Pieter Abbeel. 2017. Domain randomization for transferring deep neural networks from simulation to the real world. In2017 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, 23–30
2017
-
[64]
Jakub Wejchert and David Haumann. 1991. Animation aerodynamics.ACM SIGGRAPH Computer Graphics25, 4 (1991), 19–22
1991
-
[65]
Jiajun Wu, Chengkai Zhang, Tianfan Xue, Bill Freeman, and Josh Tenenbaum
-
[66]
Learning a probabilistic latent space of object shapes via 3d generative- adversarial modeling.Advances in neural information processing systems29 (2016)
2016
-
[67]
Rundi Wu, Chang Xiao, and Changxi Zheng. 2021. Deepcad: A deep genera- tive network for computer-aided design models. InProceedings of the IEEE/CVF international conference on computer vision. 6772–6782
2021
-
[68]
Jianfeng Xiang, Zelong Lv, Sicheng Xu, Yu Deng, Ruicheng Wang, Bowen Zhang, Dong Chen, Xin Tong, and Jiaolong Yang. 2024. Structured 3D Latents for Scalable and Versatile 3D Generation.arXiv preprint arXiv:2412.01506(2024)
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[69]
Guandao Yang, Xun Huang, Zekun Hao, Ming-Yu Liu, Serge Belongie, and Bharath Hariharan. 2019. Pointflow: 3d point cloud generation with continuous normal- izing flows. InProceedings of the IEEE/CVF international conference on computer vision. 4541–4550
2019
-
[70]
Yunhan Yang, Yufan Zhou, Yuan-Chen Guo, Zi-Xin Zou, Yukun Huang, Ying-Tian Liu, Hao Xu, Ding Liang, Yan-Pei Cao, and Xihui Liu. 2025. Omnipart: Part-aware 3d generation with semantic decoupling and structural cohesion. InProceedings of the SIGGRAPH Asia 2025 Conference Papers. 1–12
2025
-
[71]
Wang Yifan, Noam Aigerman, Vladimir G Kim, Siddhartha Chaudhuri, and Olga Sorkine-Hornung. 2020. Neural cages for detail-preserving 3d deformations. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 75–83
2020
-
[72]
Mehmet Ersin Yumer, Siddhartha Chaudhuri, Jessica K Hodgins, and Levent Burak Kara. 2015. Semantic shape editing using deformation handles.ACM Transactions on Graphics (TOG)34, 4 (2015), 1–12
2015
-
[73]
M Ersin Yumer and Niloy J Mitra. 2016. Learning semantic deformation flows with 3d convolutional networks. InEuropean Conference on Computer Vision. Springer, 294–311
2016
-
[74]
Jialiang Zhang, Haoran Liu, Danshi Li, XinQiang Yu, Haoran Geng, Yufei Ding, Jiayi Chen, and He Wang. 2024. DexGraspNet 2.0: Learning Generative Dexterous Grasping in Large-scale Synthetic Cluttered Scenes. In8th Annual Conference on Robot Learning
2024
-
[75]
Jia-Peng Zhang, Cheng-Feng Pu, Meng-Hao Guo, Yan-Pei Cao, and Shi-Min Hu
-
[76]
One model to rig them all: Diverse skeleton rigging with unirig.ACM Transactions on Graphics (TOG)44, 4 (2025), 1–18
2025
-
[77]
Zibo Zhao, Zeqiang Lai, Qingxiang Lin, Yunfei Zhao, Haolin Liu, Shuhui Yang, Yifei Feng, Mingxin Yang, Sheng Zhang, Xianghui Yang, et al. 2025. Hunyuan3d 2.0: Scaling diffusion models for high resolution textured 3d assets generation. arXiv preprint arXiv:2501.12202(2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[78]
Xiangyu Zhu, Zhiqin Chen, Ruizhen Hu, and Xiaoguang Han. 2024. Control- lable shape modeling with neural generalized cylinder. InSIGGRAPH Asia 2024 Conference Papers. 1–11
2024
-
[79]
Zeshun Zong, Xuan Li, Minchen Li, Maurizio M Chiaramonte, Wojciech Matusik, Eitan Grinspun, Kevin Carlberg, Chenfanfu Jiang, and Peter Yichen Chen. 2023. Neural stress fields for reduced-order elastoplasticity and fracture. InSIGGRAPH Asia 2023 Conference Papers. 1–11. Fishbone: From One 3D Asset to a Million Controllable Edits•19 A Mesh Preprocessing Thi...
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.