PhysAgent: Automating Physics-Based 4D Synthesis via Trajectory-Grounded Multi-Agent Feedback
Pith reviewed 2026-06-27 18:22 UTC · model grok-4.3
The pith
A multi-agent framework converts vision-tracked trajectories into text so language models can dynamically switch force fields and automate physical 4D scene synthesis.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
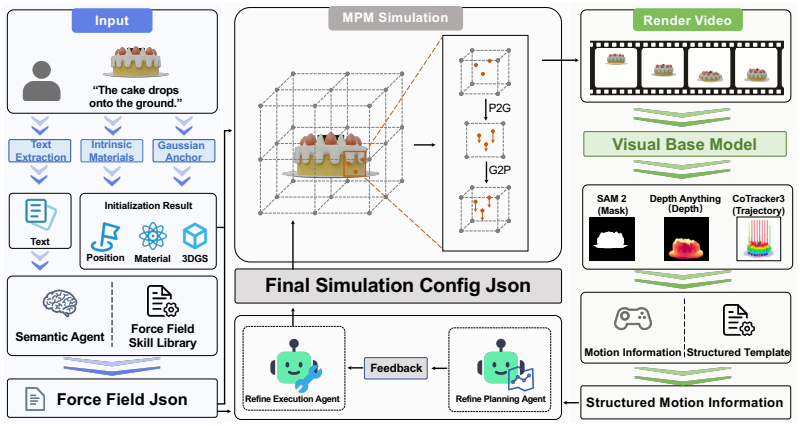
PhysAgent decouples intrinsic materials from extrinsic dynamics, employs a Semantic Agent with an externalized Force Field Skill module to produce valid initializations, and then applies Refine Agents that extract dense point trajectories from rendered frames via vision foundation models, convert those trajectories into structured textual descriptors, and harness LLM commonsense reasoning to perform zero-shot macroscopic leaps that escape local optima while dynamically switching discrete force fields.
What carries the argument
Trajectory-Grounded Multi-Agent Feedback, which turns dense point trajectories from vision models into textual descriptors that enable LLM reasoning to adjust discrete force fields inside the simulation loop.
If this is right
- Large-scale production of physically stable simulation data becomes possible from arbitrary multimodal inputs without per-scene expert configuration.
- The separation of material and force optimization allows independent refinement of each component inside the same loop.
- Zero-shot force-field switching removes the need for continuous gradient signals that SDS methods require.
- Diversity and physical accuracy both increase relative to baselines that rely on material optimization alone.
Where Pith is reading between the lines
- The same trajectory-to-text conversion step could be reused to debug or correct simulations after initial generation rather than only during creation.
- If the textual descriptors capture enough motion statistics, the approach might transfer to domains that use different underlying engines, such as rigid-body or fluid solvers.
- Combining the feedback loop with real sensor data from physical robots could close the sim-to-real gap for policy training.
Load-bearing premise
Converting dense point trajectories into structured text gives language models enough information to make correct zero-shot decisions about which force fields to apply or switch.
What would settle it
A side-by-side test in which PhysAgent-generated scenes exhibit the same physical violations or lower accuracy scores as SDS-optimized scenes on the same prompts.
Figures
read the original abstract
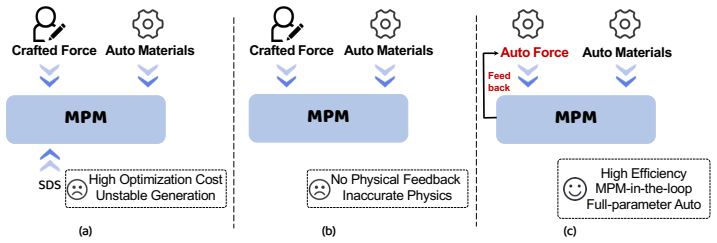
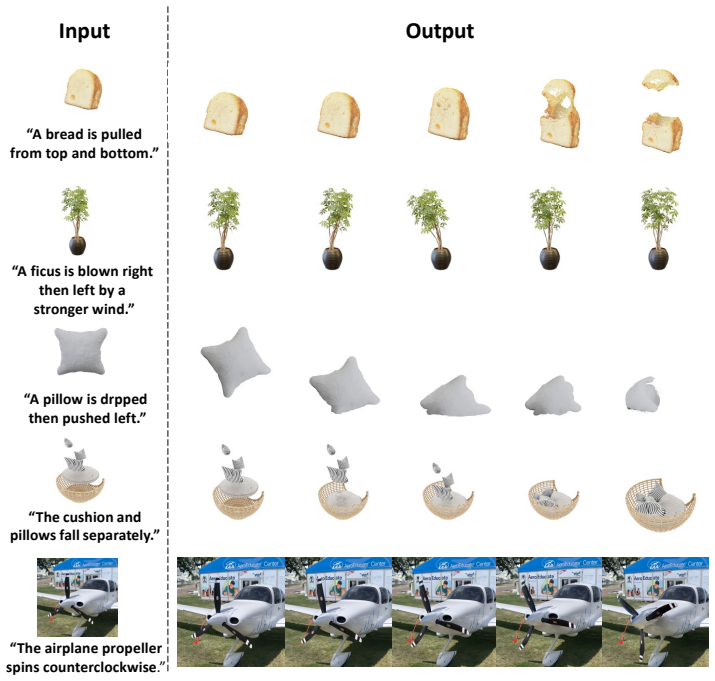
Achieving fully automated, physically plausible 3D motion synthesis is a core objective in graphics and generative AI. However, configuring complex environmental force fields still relies entirely on manual expert intervention, creating a severe bottleneck for large-scale simulation data generation. Existing automated methods primarily focus on material optimization and exhibit severe modality gaps and technical flaws when applied to the vastly more complex force field optimization space: naive Large Language Models (LLMs) lack underlying simulation feedback, causing severe physical inaccuracies, while traditional Score Distillation Sampling (SDS) suffers from sluggish gradients, local optima entrapment, and a mathematical inability to dynamically switch discrete force fields. To address this, we propose PhysAgent, the first simulator-in-the-loop multi-agent framework that leverages multimodal inputs for automated, physically grounded 4D synthesis. By decoupling intrinsic materials from extrinsic dynamics, PhysAgent utilizes a Semantic Agent equipped with an externalized Force Field Skill module to master simulation rules and generate valid initializations. Subsequently, the Refine Agents, driven by Trajectory-Grounded Multi-Agent Feedback, leverage vision foundation models to extract dense point trajectories from rendered frames. By converting these explicit motion trajectories into structured textual descriptors, the agent harnesses LLM commonsense reasoning to execute zero-shot macroscopic leaps, effectively escaping local optima and dynamically switching discrete force fields. Extensive experiments demonstrate that PhysAgent rapidly generates stable, diverse physical scenes from arbitrary multimodal prompts, significantly outperforming existing baselines in both generation diversity and physical accuracy.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes PhysAgent, the first simulator-in-the-loop multi-agent framework for automated, physically grounded 4D synthesis from arbitrary multimodal prompts. It decouples intrinsic materials from extrinsic dynamics via a Semantic Agent with an externalized Force Field Skill module for valid initializations, followed by Refine Agents that extract dense point trajectories from rendered frames using vision foundation models, convert these to structured textual descriptors, and apply LLM commonsense reasoning for zero-shot macroscopic leaps that dynamically switch discrete force fields and escape SDS local optima. The abstract claims this yields stable, diverse physical scenes that significantly outperform baselines in diversity and physical accuracy.
Significance. If the core mechanism holds, the approach could remove the manual-expert bottleneck in configuring complex environmental force fields, enabling scalable automated generation of physically plausible 4D content for graphics and simulation data. The simulator-in-the-loop multi-agent design with trajectory-grounded feedback and explicit decoupling of materials/dynamics represents a potentially useful direction beyond pure SDS or naive LLM methods.
major comments (2)
- [Abstract] Abstract: the central claim that converting dense point trajectories into structured textual descriptors enables LLM commonsense reasoning to perform reliable zero-shot macroscopic leaps and physically valid discrete force-field switches is load-bearing, yet the manuscript supplies no format, prompting template, or mechanism ensuring the text representation preserves the necessary dynamics information rather than reintroducing modality gaps.
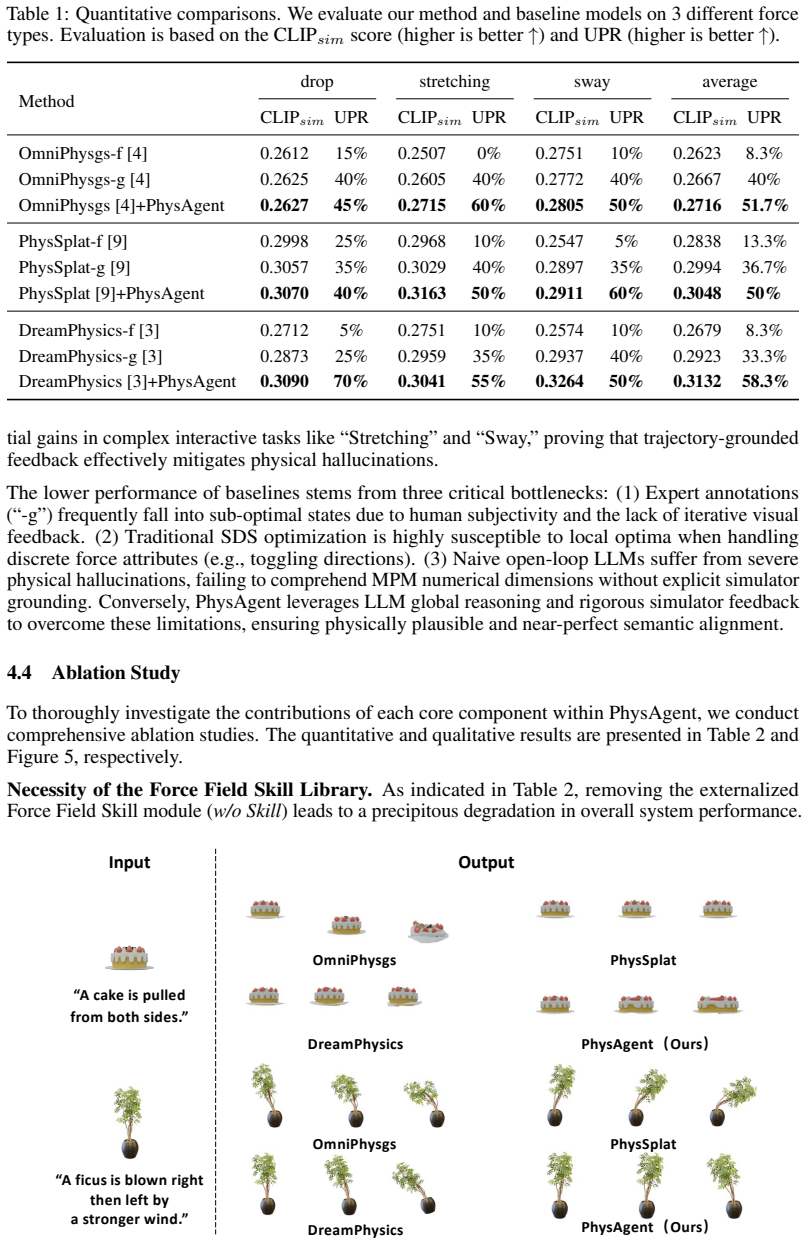
- [Abstract] Abstract: the claim of significantly outperforming baselines in generation diversity and physical accuracy cannot be assessed because the manuscript provides no experimental details, quantitative results, baseline comparisons, implementation specifics, or ablations on the trajectory-to-text step.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We will revise the manuscript to supply the missing implementation details on the trajectory-to-text conversion and to make the experimental claims fully assessable.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that converting dense point trajectories into structured textual descriptors enables LLM commonsense reasoning to perform reliable zero-shot macroscopic leaps and physically valid discrete force-field switches is load-bearing, yet the manuscript supplies no format, prompting template, or mechanism ensuring the text representation preserves the necessary dynamics information rather than reintroducing modality gaps.
Authors: We agree the abstract summarizes the conversion at a high level without the concrete format or template. In revision we will add an explicit subsection (or appendix) that defines the structured textual descriptor schema, provides the exact prompting template passed to the LLM, and explains the design choices (e.g., inclusion of velocity vectors, contact events, and force-field state) intended to retain dynamic information and avoid modality gaps. revision: yes
-
Referee: [Abstract] Abstract: the claim of significantly outperforming baselines in generation diversity and physical accuracy cannot be assessed because the manuscript provides no experimental details, quantitative results, baseline comparisons, implementation specifics, or ablations on the trajectory-to-text step.
Authors: The current manuscript version presents the high-level claims in the abstract but does not embed the supporting quantitative tables, baseline numbers, or ablations. We will expand the experiments section (and, if space permits, the abstract) to include (i) the full set of diversity and physical-accuracy metrics, (ii) direct comparisons against the cited baselines, (iii) implementation hyperparameters, and (iv) a dedicated ablation isolating the trajectory-to-text component. These additions will make the performance claims directly verifiable. revision: yes
Circularity Check
No significant circularity; framework relies on external components
full rationale
The paper presents PhysAgent as a multi-agent simulator-in-the-loop system that extracts trajectories via external vision foundation models, converts them to text, and uses LLM reasoning for force-field decisions. No load-bearing step reduces by construction to a fitted parameter, self-defined quantity, or self-citation chain within the paper. The derivation chain invokes external models and commonsense reasoning rather than internal self-reference. This matches the default non-circular case; the method's validity depends on the accuracy of those external modules, which is a separate empirical question.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Vision foundation models can accurately extract dense point trajectories from rendered frames
- domain assumption LLM commonsense reasoning applied to textual trajectory descriptors can execute zero-shot macroscopic leaps to adjust and switch discrete force fields
invented entities (2)
-
Semantic Agent equipped with externalized Force Field Skill module
no independent evidence
-
Refine Agents driven by Trajectory-Grounded Multi-Agent Feedback
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Physgaussian: Physics-integrated 3d gaussians for generative dynamics
Tianyi Xie, Zeshun Zong, Yuxing Qiu, Xuan Li, Yutao Feng, Yin Yang, and Chenfanfu Jiang. Physgaussian: Physics-integrated 3d gaussians for generative dynamics. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 4389–4398, 2024
2024
-
[2]
Chunji Lv, Zequn Chen, Donglin Di, Weinan Zhang, Hao Li, Wei Chen, Yinjie Lei, and Changsheng Li. Physgm: Large physical gaussian model for feed-forward 4d synthesis.arXiv preprint arXiv:2508.13911, 2025
-
[3]
Dreamphysics: Learning physics-based 3d dynamics with video diffusion priors
Tianyu Huang, Haoze Zhang, Yihan Zeng, Zhilu Zhang, Hui Li, Wangmeng Zuo, and Ryn- son WH Lau. Dreamphysics: Learning physics-based 3d dynamics with video diffusion priors. InProceedings of the AAAI Conference on Artificial Intelligence, volume 39, pages 3733–3741, 2025
2025
-
[4]
arXiv preprint arXiv:2501.18982 , year=
Yuchen Lin, Chenguo Lin, Jianjin Xu, and Yadong Mu. Omniphysgs: 3d constitutive gaussians for general physics-based dynamics generation.arXiv preprint arXiv:2501.18982, 2025
-
[5]
Physdreamer: Physics-based interaction with 3d objects via video generation
Tianyuan Zhang, Hong-Xing Yu, Rundi Wu, Brandon Y Feng, Changxi Zheng, Noah Snavely, Jiajun Wu, and William T Freeman. Physdreamer: Physics-based interaction with 3d objects via video generation. InEuropean Conference on Computer Vision, pages 388–406. Springer, 2024
2024
-
[6]
$\pi_0$: A Vision-Language-Action Flow Model for General Robot Control
Kevin Black, Noah Brown, Danny Driess, Adnan Esmail, Michael Equi, Chelsea Finn, Niccolo Fusai, Lachy Groom, Karol Hausman, Brian Ichter, et al. π0: A Vision-Language-Action Flow Model for General Robot Control.arXiv preprint arXiv:2410.24164, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[7]
OpenVLA: An Open-Source Vision-Language-Action Model
Moo Jin Kim, Karl Pertsch, Siddharth Karamcheti, Ted Xiao, Ashwin Balakrishna, Suraj Nair, Rafael Rafailov, Ethan Foster, Grace Lam, Pannag Sanketi, et al. Openvla: An open-source vision-language-action model.arXiv preprint arXiv:2406.09246, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[8]
DreamFusion: Text-to-3D using 2D Diffusion
Ben Poole, Ajay Jain, Jonathan T Barron, and Ben Mildenhall. Dreamfusion: Text-to-3d using 2d diffusion.arXiv preprint arXiv:2209.14988, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[9]
Physsplat: Efficient physics simulation for 3d scenes via mllm-guided gaussian splatting
Haoyu Zhao, Hao Wang, Xingyue Zhao, Hao Fei, Hongqiu Wang, Chengjiang Long, and Hua Zou. Physsplat: Efficient physics simulation for 3d scenes via mllm-guided gaussian splatting. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 5242–5252, 2025
2025
-
[10]
The material point method for simulating continuum materials
Chenfanfu Jiang, Craig Schroeder, Joseph Teran, Alexey Stomakhin, and Andrew Selle. The material point method for simulating continuum materials. InAcm siggraph 2016 courses, pages 1–52. 2016
2016
-
[11]
A material point method for snow simulation.ACM Transactions on Graphics (TOG), 32(4):1–10, 2013
Alexey Stomakhin, Craig Schroeder, Lawrence Chai, Joseph Teran, and Andrew Selle. A material point method for snow simulation.ACM Transactions on Graphics (TOG), 32(4):1–10, 2013
2013
-
[12]
Segment anything
Alexander Kirillov, Eric Mintun, Nikhila Ravi, Hanzi Mao, Chloe Rolland, Laura Gustafson, Tete Xiao, Spencer Whitehead, Alexander C Berg, Wan-Yen Lo, et al. Segment anything. In Proceedings of the IEEE/CVF international conference on computer vision, pages 4015–4026, 2023
2023
-
[13]
SAM 2: Segment Anything in Images and Videos
Nikhila Ravi, Valentin Gabeur, Yuan-Ting Hu, Ronghang Hu, Chaitanya Ryali, Tengyu Ma, Haitham Khedr, Roman Rädle, Chloe Rolland, Laura Gustafson, et al. Sam 2: Segment anything in images and videos.arXiv preprint arXiv:2408.00714, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[14]
Depth anything: Unleashing the power of large-scale unlabeled data
Lihe Yang, Bingyi Kang, Zilong Huang, Xiaogang Xu, Jiashi Feng, and Hengshuang Zhao. Depth anything: Unleashing the power of large-scale unlabeled data. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 10371–10381, 2024
2024
-
[15]
Depth Anything 3: Recovering the Visual Space from Any Views
Haotong Lin, Sili Chen, Jun Hao Liew, Donny Y . Chen, Zhenyu Li, Guang Shi, Jiashi Feng, and Bingyi Kang. Depth anything 3: Recovering the visual space from any views.arXiv preprint arXiv:2511.10647, 2025. 10
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[16]
Cotracker3: Simpler and better point tracking by pseudo-labelling real videos
Nikita Karaev, Yuri Makarov, Jianyuan Wang, Natalia Neverova, Andrea Vedaldi, and Christian Rupprecht. Cotracker3: Simpler and better point tracking by pseudo-labelling real videos. In Proceedings of the IEEE/CVF International Conference on Computer Vision, pages 6013–6022, 2025
2025
-
[17]
Cotracker: It is better to track together
Nikita Karaev, Ignacio Rocco, Benjamin Graham, Natalia Neverova, Andrea Vedaldi, and Christian Rupprecht. Cotracker: It is better to track together. InEuropean conference on computer vision, pages 18–35. Springer, 2024
2024
-
[18]
3d gaussian splatting for real-time radiance field rendering.ACM Trans
Bernhard Kerbl, Georgios Kopanas, Thomas Leimkühler, George Drettakis, et al. 3d gaussian splatting for real-time radiance field rendering.ACM Trans. Graph., 42(4):139–1, 2023
2023
-
[19]
Shap-E: Generating Conditional 3D Implicit Functions
Heewoo Jun and Alex Nichol. Shap-e: Generating conditional 3d implicit functions.arXiv preprint arXiv:2305.02463, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[20]
Point-E: A System for Generating 3D Point Clouds from Complex Prompts
Alex Nichol, Heewoo Jun, Prafulla Dhariwal, Pamela Mishkin, and Mark Chen. Point-e: A system for generating 3d point clouds from complex prompts.arXiv preprint arXiv:2212.08751, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[21]
In Computer Graphics Forum, volume 36, pages 1–12
The shape variational autoencoder: A deep generative model of part-segmented 3d objects. In Computer Graphics Forum, volume 36, pages 1–12. Wiley Online Library, 2017
2017
-
[22]
Single-stage diffusion nerf: A unified approach to 3d generation and reconstruction
Hansheng Chen, Jiatao Gu, Anpei Chen, Wei Tian, Zhuowen Tu, Lingjie Liu, and Hao Su. Single-stage diffusion nerf: A unified approach to 3d generation and reconstruction. InPro- ceedings of the IEEE/CVF international conference on computer vision, pages 2416–2425, 2023
2023
-
[23]
Lgm: Large multi-view gaussian model for high-resolution 3d content creation
Jiaxiang Tang, Zhaoxi Chen, Xiaokang Chen, Tengfei Wang, Gang Zeng, and Ziwei Liu. Lgm: Large multi-view gaussian model for high-resolution 3d content creation. InEuropean Conference on Computer Vision, pages 1–18. Springer, 2024
2024
-
[24]
LRM: Large Reconstruction Model for Single Image to 3D
Yicong Hong, Kai Zhang, Jiuxiang Gu, Sai Bi, Yang Zhou, Difan Liu, Feng Liu, Kalyan Sunkavalli, Trung Bui, and Hao Tan. Lrm: Large reconstruction model for single image to 3d. arXiv preprint arXiv:2311.04400, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[25]
Long-lrm: Long-sequence large reconstruction model for wide-coverage gaussian splats
Chen Ziwen, Hao Tan, Kai Zhang, Sai Bi, Fujun Luan, Yicong Hong, Li Fuxin, and Zexiang Xu. Long-lrm: Long-sequence large reconstruction model for wide-coverage gaussian splats. In Proceedings of the IEEE/CVF International Conference on Computer Vision, pages 4349–4359, 2025
2025
-
[26]
Gs-lrm: Large reconstruction model for 3d gaussian splatting
Kai Zhang, Sai Bi, Hao Tan, Yuanbo Xiangli, Nanxuan Zhao, Kalyan Sunkavalli, and Zexiang Xu. Gs-lrm: Large reconstruction model for 3d gaussian splatting. InEuropean Conference on Computer Vision, pages 1–19. Springer, 2024
2024
-
[27]
Motiongs: Exploring explicit motion guidance for deformable 3d gaussian splatting.Advances in Neural Information Processing Systems, 37:101790–101817, 2024
Ruijie Zhu, Yanzhe Liang, Hanzhi Chang, Jiacheng Deng, Jiahao Lu, Wenfei Yang, Tianzhu Zhang, and Yongdong Zhang. Motiongs: Exploring explicit motion guidance for deformable 3d gaussian splatting.Advances in Neural Information Processing Systems, 37:101790–101817, 2024
2024
-
[28]
Align your gaussians: Text-to-4d with dynamic 3d gaussians and composed diffusion models
Huan Ling, Seung Wook Kim, Antonio Torralba, Sanja Fidler, and Karsten Kreis. Align your gaussians: Text-to-4d with dynamic 3d gaussians and composed diffusion models. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 8576–8588, 2024
2024
-
[29]
arXiv preprint arXiv:2312.17142 , year=
Jiawei Ren, Liang Pan, Jiaxiang Tang, Chi Zhang, Ang Cao, Gang Zeng, and Ziwei Liu. Dreamgaussian4d: Generative 4d gaussian splatting.arXiv preprint arXiv:2312.17142, 2023
-
[30]
Improved distribution matching distillation for fast image synthesis
Tianwei Yin, Michaël Gharbi, Taesung Park, Richard Zhang, Eli Shechtman, Fredo Durand, and William T Freeman. Improved distribution matching distillation for fast image synthesis. Advances in neural information processing systems, 37:47455–47487, 2024
2024
-
[31]
Yuyang Yin, Dejia Xu, Zhangyang Wang, Yao Zhao, and Yunchao Wei. 4dgen: Grounded 4d content generation with spatial-temporal consistency.arXiv preprint arXiv:2312.17225, 2023. 11
-
[32]
4diffusion: Multi-view video diffusion model for 4d generation.Advances in Neural Information Processing Systems, 37:15272–15295, 2024
Haiyu Zhang, Xinyuan Chen, Yaohui Wang, Xihui Liu, Yunhong Wang, and Yu Qiao. 4diffusion: Multi-view video diffusion model for 4d generation.Advances in Neural Information Processing Systems, 37:15272–15295, 2024
2024
-
[33]
Animate3d: Animating any 3d model with multi-view video diffusion.Advances in Neural Information Processing Systems, 37:125879–125906, 2024
Yanqin Jiang, Chaohui Yu, Chenjie Cao, Fan Wang, Weiming Hu, and Jin Gao. Animate3d: Animating any 3d model with multi-view video diffusion.Advances in Neural Information Processing Systems, 37:125879–125906, 2024
2024
-
[34]
Efficient4d: Fast dynamic 3d object generation from a single-view video.International Journal of Computer Vision, 134(1):14, 2026
Zijie Pan, Zeyu Yang, Xiatian Zhu, and Li Zhang. Efficient4d: Fast dynamic 3d object generation from a single-view video.International Journal of Computer Vision, 134(1):14, 2026
2026
-
[35]
Chen Wang, Chuhao Chen, Yiming Huang, Zhiyang Dou, Yuan Liu, Jiatao Gu, and Lingjie Liu. Physctrl: Generative physics for controllable and physics-grounded video generation.arXiv preprint arXiv:2509.20358, 2025
-
[36]
Quankai Gao, Jiawei Yang, Qiangeng Xu, Le Chen, and Yue Wang. Lome: Learning human-object manipulation with action-conditioned egocentric world model.arXiv preprint arXiv:2603.27449, 2026
-
[37]
Nate Gillman, Charles Herrmann, Michael Freeman, Daksh Aggarwal, Evan Luo, Deqing Sun, and Chen Sun. Force prompting: Video generation models can learn and generalize physics-based control signals.arXiv preprint arXiv:2505.19386, 2025
-
[38]
Warp: A high-performance python framework for gpu simulation and graphics
Miles Macklin. Warp: A high-performance python framework for gpu simulation and graphics. InNVIDIA GPU Technology Conference (GTC), volume 3, 2022
2022
-
[39]
Yicheng Cao, Zhuo Huang, Yu Yao, Yiming Ying, Daoyi Dong, and Tongliang Liu. i- physgaussian: Implicit physical simulation for 3d gaussian splatting.arXiv preprint arXiv:2602.17117, 2026
-
[40]
arXiv preprint arXiv:2411.17189 , year=
Xiyang Tan, Ying Jiang, Xuan Li, Zeshun Zong, Tianyi Xie, Yin Yang, and Chenfanfu Jiang. Physmotion: Physics-grounded dynamics from a single image.arXiv preprint arXiv:2411.17189, 2024
-
[41]
arXiv preprint arXiv:2406.04338 , year=
Fangfu Liu, Hanyang Wang, Shunyu Yao, Shengjun Zhang, Jie Zhou, and Yueqi Duan. Physics3d: Learning physical properties of 3d gaussians via video diffusion.arXiv preprint arXiv:2406.04338, 2024
-
[42]
Motionphysics: Learnable motion distillation for text-guided simulation
Miaowei Wang, Jakub Zadro ˙zny, Oisin Mac Aodha, and Amir Vaxman. Motionphysics: Learnable motion distillation for text-guided simulation. InProceedings of the AAAI Conference on Artificial Intelligence, volume 40, pages 9993–10001, 2026
2026
-
[43]
Physgen3d: Crafting a miniature interactive world from a single image
Boyuan Chen, Hanxiao Jiang, Shaowei Liu, Saurabh Gupta, Yunzhu Li, Hao Zhao, and Shenlong Wang. Physgen3d: Crafting a miniature interactive world from a single image. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 6178–6189, 2025
2025
-
[44]
Physgen: Rigid-body physics-grounded image-to-video generation
Shaowei Liu, Zhongzheng Ren, Saurabh Gupta, and Shenlong Wang. Physgen: Rigid-body physics-grounded image-to-video generation. InEuropean Conference on Computer Vision, pages 360–378. Springer, 2024
2024
-
[45]
Mosiv: Multi-object system identification from videos.arXiv preprint arXiv:2603.06022, 2026
Chunjiang Liu, Xiaoyuan Wang, Qingran Lin, Albert Xiao, Haoyu Chen, Shizheng Wen, Hao Zhang, Lu Qi, Ming-Hsuan Yang, Laszlo A Jeni, et al. Mosiv: Multi-object system identification from videos.arXiv preprint arXiv:2603.06022, 2026
-
[46]
Yikun Ma, Yiqing Li, Jingwen Ye, Zhongkai Wu, Weidong Zhang, Lin Gao, and Zhi Jin. Fastphysgs: Accelerating physics-based dynamic 3dgs simulation via interior completion and adaptive optimization.arXiv preprint arXiv:2602.01723, 2026
-
[47]
PhysChoreo: Physics-Controllable Video Generation with Part-Aware Semantic Grounding
Haoze Zhang, Tianyu Huang, Zichen Wan, Xiaowei Jin, Hongzhi Zhang, Hui Li, and Wangmeng Zuo. Physchoreo: Physics-controllable video generation with part-aware semantic grounding. arXiv preprint arXiv:2511.20562, 2025. 12
work page internal anchor Pith review arXiv 2025
-
[48]
Voyager: An Open-Ended Embodied Agent with Large Language Models
Guanzhi Wang, Yuqi Xie, Yunfan Jiang, Ajay Mandlekar, Chaowei Xiao, Yuke Zhu, Linxi Fan, and Anima Anandkumar. V oyager: An open-ended embodied agent with large language models. arXiv preprint arXiv:2305.16291, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[49]
ProgPrompt: Generating Situated Robot Task Plans using Large Language Models
Ishika Singh, Valts Blukis, Arsalan Mousavian, Ankit Goyal, Danfei Xu, Jonathan Tremblay, Dieter Fox, Jesse Thomason, and Animesh Garg. Progprompt: Generating situated robot task plans using large language models.arXiv preprint arXiv:2209.11302, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[50]
Toolformer: Language models can teach themselves to use tools.Advances in neural information processing systems, 36: 68539–68551, 2023
Timo Schick, Jane Dwivedi-Yu, Roberto Dessì, Roberta Raileanu, Maria Lomeli, Eric Hambro, Luke Zettlemoyer, Nicola Cancedda, and Thomas Scialom. Toolformer: Language models can teach themselves to use tools.Advances in neural information processing systems, 36: 68539–68551, 2023
2023
-
[51]
Eureka: Human-Level Reward Design via Coding Large Language Models
Yecheng Jason Ma, William Liang, Guanzhi Wang, De-An Huang, Osbert Bastani, Dinesh Jayaraman, Yuke Zhu, Linxi Fan, and Anima Anandkumar. Eureka: Human-level reward design via coding large language models.arXiv preprint arXiv:2310.12931, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[52]
Grove: A generalized reward for learning open-vocabulary physical skill
Jieming Cui, Tengyu Liu, Ziyu Meng, Jiale Yu, Ran Song, Wei Zhang, Yixin Zhu, and Siyuan Huang. Grove: A generalized reward for learning open-vocabulary physical skill. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 15781–15790, 2025
2025
-
[53]
Layoutgpt: Compositional visual planning and generation with large language models.Advances in Neural Information Processing Systems, 36:18225–18250, 2023
Weixi Feng, Wanrong Zhu, Tsu-jui Fu, Varun Jampani, Arjun Akula, Xuehai He, Sugato Basu, Xin Eric Wang, and William Yang Wang. Layoutgpt: Compositional visual planning and generation with large language models.Advances in Neural Information Processing Systems, 36:18225–18250, 2023
2023
-
[54]
Holodeck: Language guided generation of 3d embodied ai environments
Yue Yang, Fan-Yun Sun, Luca Weihs, Eli VanderBilt, Alvaro Herrasti, Winson Han, Jiajun Wu, Nick Haber, Ranjay Krishna, Lingjie Liu, et al. Holodeck: Language guided generation of 3d embodied ai environments. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 16227–16237, 2024
2024
-
[55]
Phyt2v: Llm-guided iterative self- refinement for physics-grounded text-to-video generation
Qiyao Xue, Xiangyu Yin, Boyuan Yang, and Wei Gao. Phyt2v: Llm-guided iterative self- refinement for physics-grounded text-to-video generation. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 18826–18836, 2025
2025
-
[56]
Qwen3.5: Towards native multimodal agents, February 2026
Qwen Team. Qwen3.5: Towards native multimodal agents, February 2026
2026
-
[57]
Objaverse: A universe of annotated 3d objects
Matt Deitke, Dustin Schwenk, Jordi Salvador, Luca Weihs, Oscar Michel, Eli VanderBilt, Ludwig Schmidt, Kiana Ehsani, Aniruddha Kembhavi, and Ali Farhadi. Objaverse: A universe of annotated 3d objects. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 13142–13153, 2023
2023
-
[58]
Vector Field Parser
Alec Radford, Jong Wook Kim, Chris Hallacy, Aditya Ramesh, Gabriel Goh, Sandhini Agarwal, Girish Sastry, Amanda Askell, Pamela Mishkin, Jack Clark, et al. Learning transferable visual models from natural language supervision. InInternational conference on machine learning, pages 8748–8763. PmLR, 2021. 13 Appendix A Semantic Agent and Force Field Skill Lib...
2021
-
[59]
default_drop
Output Schema Definition Your final configuration must be formatted as a JSON block matching the following schema. Multiple actions can be overlaid or sequenced within theactionsarray. { "default_drop": boolean, "actions": [ { "action_type": "translation" | "scale" | "impulse" | "torque", "vector": [x, y, z], "magnitude": float, "active_time": [start_time...
-
[60]
Mapped to a continuous external force field ( fext) accumulated over the grid update phase
Physical Field Mapping & MPM Integration • translation: For pushing, pulling, or blowing. Mapped to a continuous external force field ( fext) accumulated over the grid update phase. • scale: For squeezing or stretching. Mapped to a spatially-varying force field scaling along the normal axis.magnitude>0denotes outward stretching;<0denotes inward compressio...
-
[61]
slightly
Parameter Constraints •Coordinate System:Thevectormust be strictly resolved and normalized into a 3D unit vector. • Magnitude (M):The auxiliary value of M ranges from 0.4 to 1.6. Default is 1.0. Modulate mono- tonically based on linguistic intensity modifiers (e.g., “slightly”→ lower bound, “violently” → upper bound). Reverse sign for opposing semantics (...
-
[62]
However, the final mechanical parameters MUST be enclosed within a valid JSON block
Execution Constraint You may reason step-by-step to analyze coordinates and intensities. However, the final mechanical parameters MUST be enclosed within a valid JSON block. 14 A.2 Force Field Skill Library Formulations TheForce Field Skill Libraryserves as the deterministic compiler that bridges the semantic JSON outputs and the continuous MPM simulator....
-
[63]
The Gaussian means ( µ) are directly mapped to initial particle positions ( xp)
Geometric Anchoring (3DGS to Particles):The explicit 3D Gaussian Splatting (3DGS) repre- sentation is converted into Lagrangian particles. The Gaussian means ( µ) are directly mapped to initial particle positions ( xp). The particle volumes ( Vp) and densities are derived from the Gaussian scales (s) and opacities ( α). These initialized arrays are cached...
-
[64]
This includes the material type index (e.g., 0 for jelly, 1 for metal, 2 for sand) and its corresponding Young’s modulus (E) and Poisson’s ratio (ν)
Intrinsic Materials:The material properties extracted via PhysGM are mapped to the constitutive models defined in our simulator. This includes the material type index (e.g., 0 for jelly, 1 for metal, 2 for sand) and its corresponding Young’s modulus (E) and Poisson’s ratio (ν)
-
[65]
Extrinsic Force Fields:The compiled skills (translation, scale, impulse, torque) and their temporal constraints (active_time) generated by the Semantic Agent are directly injected
-
[66]
simulation-in- the-loop
Global Hyperparameters & Boundaries:Default simulation attributes are appended to ensure numerical stability. This includes the background grid resolution ( n_grid= 100 ), grid limits, sub-step size (∆tsub), base gravitational acceleration, and default boundary conditions (e.g., a frictional ground collision plane). B Refine Agents Workflow Unlike traditi...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.