TaskGround: Structured Executable Task Inference for Full-Scene Household Reasoning
Pith reviewed 2026-05-20 10:50 UTC · model grok-4.3
The pith
Grounding complete household scenes into compact task-relevant slices lets agents recover executable task structures accurately, raising success rates and slashing token costs even for small models.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
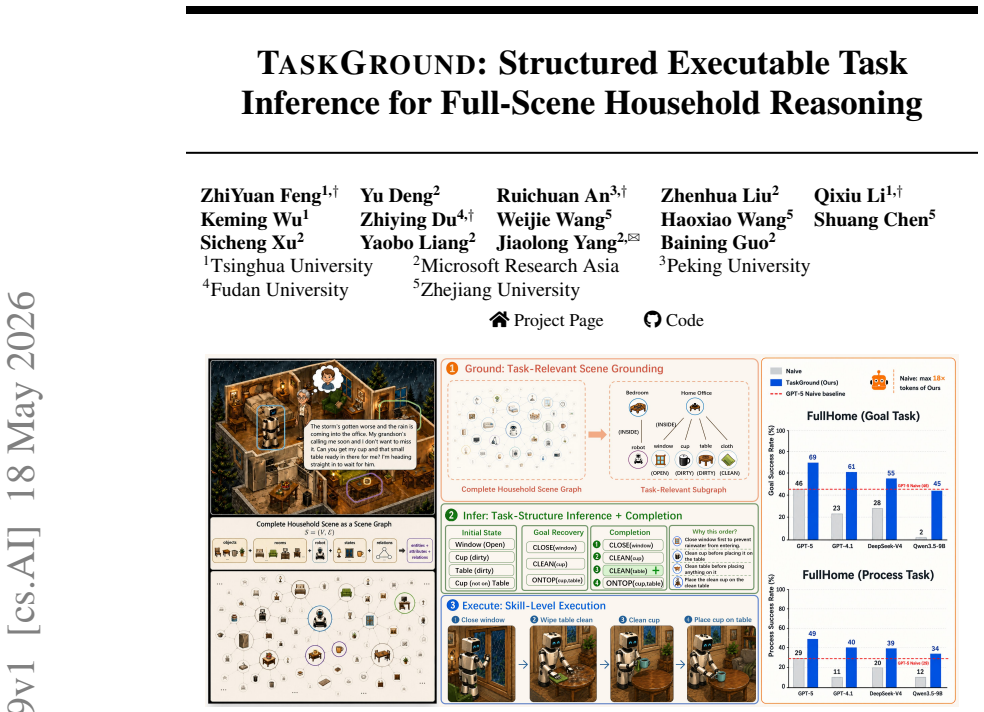
TaskGround is a training-free, model-agnostic Ground-Infer-Execute framework that first grounds a complete household scene plus a situated request into a compact task-relevant scene slice, then infers an executable task structure that includes ordering constraints, and finally compiles that structure into a grounded sequence of skill-level actions. Evaluated on the FullHome suite of 400 human-validated tasks across diverse home environments and both goal-oriented and process-constrained requirements, the approach delivers large improvements in task success rates for proprietary and open-weight models alike and makes Qwen3.5-9B competitive with GPT-5 under direct complete-scene prompting at a
What carries the argument
The Ground-Infer-Execute pipeline that converts a full scene and request into a compact task-relevant slice before inferring executable task structure and ordering.
If this is right
- Compact open-weight models become viable for on-device household agents that cannot afford long-context reasoning.
- Success improves because the agent is no longer distracted by irrelevant objects when recovering task conditions and orderings.
- Token costs drop enough to support repeated reasoning steps in long-horizon household activities.
- Task-structure inference emerges as the identifiable central bottleneck once grounding removes scene clutter.
Where Pith is reading between the lines
- The same slice-first strategy could reduce context overload in other embodied settings where scenes contain far more data than any single task needs.
- Learned grounding modules might produce even tighter slices than the current training-free method and further improve small-model performance.
- Recovered ordering constraints could transfer directly to multi-agent coordination inside shared living spaces.
Load-bearing premise
Compact task-relevant scene slices obtained by grounding preserve enough context to recover accurate task structure and ordering constraints without losing critical information present only in the full scene.
What would settle it
A collection of tasks where essential ordering or condition information sits only in scene elements the grounding step discards; if success rates fall sharply on those tasks compared with direct full-scene prompting, the central claim does not hold.
Figures


read the original abstract
In real home deployments, household agents must often operate from a complete household scene and a situated household request, rather than from a clean task specification. Such requests require agents to identify task-relevant entities, recover intended task conditions, and resolve ordering constraints from the surrounding scene context. We formalize this capability as full-scene household reasoning: given a complete household scene and a situated household request, an agent must infer executable task structure before producing a grounded skill-level action sequence. This setting is challenging because complete household scenes contain substantial task-irrelevant information, making direct complete-scene prompting inefficient and error-prone. In practical deployment, this challenge is further amplified by privacy and local compute constraints, which favor compact open-weight models with limited long-context reasoning ability. We propose TaskGround, a training-free and model-agnostic Ground-Infer-Execute framework that grounds complete scenes into compact task-relevant scene slices, infers executable task structure, and compiles it into grounded skill-level action sequences. To evaluate this setting, we introduce FullHome, a human-validated evaluation suite of 400 household tasks spanning diverse home-scale environments and both goal-oriented and process-constrained requirements. On FullHome, TaskGround improves task success rates by large margins across both proprietary and open-weight models. Notably, it makes Qwen3.5-9B competitive with GPT-5 under direct complete-scene prompting while reducing total input-token cost by up to 18x. Our results identify executable task-structure inference as a central bottleneck in full-scene household reasoning and show that structured grounding can make compact local models substantially more effective for practical household deployment.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes TaskGround, a training-free and model-agnostic Ground-Infer-Execute framework for full-scene household reasoning. Given a complete household scene and a situated household request, the method first grounds the scene into a compact task-relevant slice, then infers executable task structure (including conditions and ordering constraints), and finally compiles the structure into grounded skill-level action sequences. To support evaluation, the authors introduce FullHome, a human-validated suite of 400 tasks across diverse home environments covering both goal-oriented and process-constrained requirements. On this benchmark the framework is reported to deliver large gains in task success rate for both proprietary and open-weight models, notably bringing Qwen3.5-9B to parity with GPT-5 under direct complete-scene prompting while reducing total input tokens by up to 18×.
Significance. If the empirical claims hold under rigorous verification, the work would be significant for practical household robotics: it directly targets the context-overload and long-context limitations that hinder compact local models under privacy and compute constraints. The training-free, model-agnostic design and the explicit identification of executable task-structure inference as a central bottleneck are strengths. The new FullHome benchmark also provides a concrete testbed for future work on situated, full-scene reasoning.
major comments (2)
- [§4 and Abstract] §4 (Experiments) and Abstract: the headline claims of large success-rate margins and up to 18× token reduction rest on an evaluation whose protocol, baseline definitions, statistical significance tests, and error analysis are not described. Without these details the central empirical claim cannot be verified from the manuscript.
- [§3 and §4] §3 (Grounding) and §4: the framework asserts that compact task-relevant slices preserve every entity, spatial relation, and implicit ordering constraint required for accurate executable task inference. No ablation compares inference accuracy on identical models using the full scene versus the grounded slice, and no failure-case audit attributes errors to omitted context. This leaves the performance margins vulnerable to the possibility that they are artifacts of the particular FullHome task distribution rather than a general property of the Ground-Infer-Execute pipeline.
minor comments (2)
- [§3] Notation for the inferred task structure (conditions, ordering constraints, and skill-level actions) is introduced without a compact formal definition or example that would allow readers to reproduce the compilation step.
- [§4] The FullHome benchmark description would benefit from an explicit breakdown of task categories (goal-oriented vs. process-constrained) and environment scales to clarify the diversity claimed in the abstract.
Simulated Author's Rebuttal
We thank the referee for their constructive review and for highlighting areas where the experimental details and supporting analyses can be strengthened. We address each major comment below and will incorporate the suggested clarifications and additional studies in a revised manuscript.
read point-by-point responses
-
Referee: [§4 and Abstract] §4 (Experiments) and Abstract: the headline claims of large success-rate margins and up to 18× token reduction rest on an evaluation whose protocol, baseline definitions, statistical significance tests, and error analysis are not described. Without these details the central empirical claim cannot be verified from the manuscript.
Authors: We acknowledge that the current manuscript does not provide a sufficiently explicit description of the full evaluation protocol, baseline implementations, statistical testing procedures, or a systematic error analysis. In the revised version we will expand §4 with a dedicated subsection that details the task execution protocol, precise definitions of all baselines (including direct complete-scene prompting), success criteria, and the statistical tests used to assess significance (e.g., McNemar’s test for paired success-rate comparisons and bootstrap confidence intervals). We will also add a quantitative error analysis that categorizes failure modes across models. revision: yes
-
Referee: [§3 and §4] §3 (Grounding) and §4: the framework asserts that compact task-relevant slices preserve every entity, spatial relation, and implicit ordering constraint required for accurate executable task inference. No ablation compares inference accuracy on identical models using the full scene versus the grounded slice, and no failure-case audit attributes errors to omitted context. This leaves the performance margins vulnerable to the possibility that they are artifacts of the particular FullHome task distribution rather than a general property of the Ground-Infer-Execute pipeline.
Authors: We agree that an explicit ablation isolating the contribution of the grounding step to task-structure inference accuracy would strengthen the claims. Although the reported gains are consistent across multiple model families and sizes, this does not directly quantify whether the grounded slices retain all necessary constraints. In the revision we will add an ablation that measures the correctness of inferred conditions and ordering constraints on the same models when given the full scene versus the grounded slice. We will also include a qualitative failure-case audit that examines whether any observed errors can be traced to omitted context, leveraging the human-validated annotations already present in FullHome. revision: yes
Circularity Check
No circularity: training-free framework with empirical results on external benchmark
full rationale
The paper presents TaskGround as a training-free, model-agnostic Ground-Infer-Execute pipeline that grounds scenes into compact slices before inferring executable task structure. No mathematical derivations, equations, fitted parameters, or first-principles predictions are described that could reduce to inputs by construction. Performance claims rest on reported success rates on the newly introduced FullHome benchmark of 400 tasks, with comparisons across models. The central claims are externally falsifiable via the benchmark and do not rely on self-citation chains or ansatzes smuggled from prior work. This matches the default case of a self-contained empirical framework with no load-bearing circular steps.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We propose TaskGround, a training-free and model-agnostic Ground–Infer–Execute framework that grounds complete scenes into compact task-relevant scene slices, infers executable task structure, and compiles it into grounded skill-level action sequences.
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
TaskGround improves task success rates by large margins across both proprietary and open-weight models... reducing total input-token cost by up to 18×.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Do As I Can, Not As I Say: Grounding Language in Robotic Affordances
Michael Ahn, Anthony Brohan, Noah Brown, Yevgen Chebotar, Omar Cortes, Byron David, Chelsea Finn, Chuyuan Fu, Keerthana Gopalakrishnan, Karol Hausman, et al. Do as i can, not as i say: Grounding language in robotic affordances.arXiv preprint arXiv:2204.01691, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[2]
Grounding llms for robot task planning using closed-loop state feedback,
Vineet Bhat, Ali Umut Kaypak, Prashanth Krishnamurthy, Ramesh Karri, and Farshad Khor- rami. Grounding llms for robot task planning using closed-loop state feedback, 2024.URL https://arxiv. org/abs/2402.08546, 2024
-
[3]
Meghan Booker, Grayson Byrd, Bethany Kemp, Aurora Schmidt, and Corban Rivera. Embod- iedrag: Dynamic 3d scene graph retrieval for efficient and scalable robot task planning.arXiv preprint arXiv:2410.23968, 2024
-
[4]
Prash: a framework for privacy risk analysis of smart homes.Sensors, 21(19):6399, 2021
Joseph Bugeja, Andreas Jacobsson, and Paul Davidsson. Prash: a framework for privacy risk analysis of smart homes.Sensors, 21(19):6399, 2021
work page 2021
-
[5]
Matthew Chang, Gunjan Chhablani, Alexander Clegg, Mikael Dallaire Cote, Ruta Desai, Michal Hlavac, Vladimir Karashchuk, Jacob Krantz, Roozbeh Mottaghi, Priyam Parashar, et al. Partnr: A benchmark for planning and reasoning in embodied multi-agent tasks.arXiv preprint arXiv:2411.00081, 2024
-
[6]
Yiye Chen, Harpreet S Sawhney, Nicholas Gydé, Yanan Jian, Jack Saunders, Patricio Vela, and Benjamin E Lundell. sg2. InProceedings of the AAAI Conference on Artificial Intelligence, volume 40, pages 30332–30340, 2026
work page 2026
-
[7]
Lota-bench: Bench- marking language-oriented task planners for embodied agents,
Jae-Woo Choi, Youngwoo Yoon, Hyobin Ong, Jaehong Kim, and Minsu Jang. Lota- bench: Benchmarking language-oriented task planners for embodied agents.arXiv preprint arXiv:2402.08178, 2024
-
[8]
Gheorghe Comanici, Eric Bieber, Mike Schaekermann, Ice Pasupat, Noveen Sachdeva, Inderjit Dhillon, Marcel Blistein, Ori Ram, Dan Zhang, Evan Rosen, et al. Gemini 2.5: Pushing the frontier with advanced reasoning, multimodality, long context, and next generation agentic capabilities.arXiv preprint arXiv:2507.06261, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[9]
Deepseek-v4: Towards highly efficient million-token context intelligence, 2026
DeepSeek-AI. Deepseek-v4: Towards highly efficient million-token context intelligence, 2026
work page 2026
-
[10]
A spotlight on security and privacy risks with future household robots: attacks and lessons
Tamara Denning, Cynthia Matuszek, Karl Koscher, Joshua R Smith, and Tadayoshi Kohno. A spotlight on security and privacy risks with future household robots: attacks and lessons. In Proceedings of the 11th international conference on Ubiquitous computing, pages 105–114, 2009
work page 2009
-
[11]
Xiaofeng Gao, Qiaozi Gao, Ran Gong, Kaixiang Lin, Govind Thattai, and Gaurav S Sukhatme. Dialfred: Dialogue-enabled agents for embodied instruction following.IEEE Robotics and Automation Letters, 7:10049–10056, 2022
work page 2022
-
[12]
Gemma Team. Gemma 3 technical report.arXiv preprint arXiv:2503.19786, 2025. doi: 10.48550/arXiv.2503.19786. URLhttps://arxiv.org/abs/2503.19786
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2503.19786 2025
-
[13]
Domain-conditioned scene graphs for state- grounded task planning
Jonas Herzog, Jiangpin Liu, and Yue Wang. Domain-conditioned scene graphs for state- grounded task planning. In2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 4142–4149. IEEE, 2025
work page 2025
-
[14]
Language models as zero-shot planners: Extracting actionable knowledge for embodied agents
Wenlong Huang, Pieter Abbeel, Deepak Pathak, and Igor Mordatch. Language models as zero-shot planners: Extracting actionable knowledge for embodied agents. InInternational conference on machine learning, pages 9118–9147. PMLR, 2022
work page 2022
-
[15]
Inner Monologue: Embodied Reasoning through Planning with Language Models
Wenlong Huang, Fei Xia, Ted Xiao, Harris Chan, Jacky Liang, Pete Florence, Andy Zeng, Jonathan Tompson, Igor Mordatch, Yevgen Chebotar, et al. Inner monologue: Embodied reasoning through planning with language models.arXiv preprint arXiv:2207.05608, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[16]
Aaron Hurst, Adam Lerer, Adam P Goucher, Adam Perelman, Aditya Ramesh, Aidan Clark, AJ Ostrow, Akila Welihinda, Alan Hayes, Alec Radford, et al. Gpt-4o system card.arXiv preprint arXiv:2410.21276, 2024. 11
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[17]
REI-Bench: Can Embodied Agents Understand Vague Human Instructions in Task Planning?
Chenxi Jiang, Chuhao Zhou, and Jianfei Yang. Rei-bench: Can embodied agents understand vague human instructions in task planning?arXiv preprint arXiv:2505.10872, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[18]
Yuanchen Ju, Yongyuan Liang, Yen-Jen Wang, Nandiraju Gireesh, Yuanliang Ju, Seungjae Lee, Qiao Gu, Elvis Hsieh, Furong Huang, and Koushil Sreenath. Momagraph: State-aware unified scene graphs with vision-language model for embodied task planning.arXiv preprint arXiv:2512.16909, 2025
-
[19]
Taeyoon Kwon, Dongwook Choi, Hyojun Kim, Sunghwan Kim, Seungjun Moon, Beong-woo Kwak, Kuan-Hao Huang, and Jinyoung Yeo. Embodied agents meet personalization: In- vestigating challenges and solutions through the lens of memory utilization.arXiv preprint arXiv:2505.16348, 2025
-
[20]
Behavior- 1k: A benchmark for embodied ai with 1,000 everyday activities and realistic simulation
Chengshu Li, Ruohan Zhang, Josiah Wong, Cem Gokmen, Sanjana Srivastava, Roberto Martín-Martín, Chen Wang, Gabrael Levine, Michael Lingelbach, Jiankai Sun, et al. Behavior- 1k: A benchmark for embodied ai with 1,000 everyday activities and realistic simulation. In Conference on Robot Learning, pages 80–93. PMLR, 2023
work page 2023
-
[21]
Manling Li, Shiyu Zhao, Qineng Wang, Kangrui Wang, Yu Zhou, Sanjana Srivastava, Cem Gokmen, Tony Lee, Li E Li, Ruohan Zhang, et al. Embodied agent interface: Benchmarking llms for embodied decision making.Advances in Neural Information Processing Systems, 37: 100428–100534, 2024
work page 2024
-
[22]
Silin Li, Yuhang Guo, Jiashu Yao, Zeming Liu, and Haifeng Wang. Homebench: Evaluating llms in smart homes with valid and invalid instructions across single and multiple devices. InProceedings of the 63rd Annual Meeting of the Association for Computational Linguistics (Volume 1: Long Papers), pages 12230–12250, 2025
work page 2025
-
[23]
Code as policies: Language model programs for embodied control
Jacky Liang, Wenlong Huang, Fei Xia, Peng Xu, Karol Hausman, Brian Ichter, Pete Florence, and Andy Zeng. Code as policies: Language model programs for embodied control. In2023 IEEE International conference on robotics and automation (ICRA), pages 9493–9500. IEEE, 2023
work page 2023
-
[24]
Anatoly O Onishchenko, Alexey K Kovalev, and Aleksandr I Panov. Lookplangraph: Embodied instruction following method with vlm graph augmentation.arXiv preprint arXiv:2512.21243, 2025
-
[25]
Introducing GPT-4.1 in the api.https://openai.com/index/gpt-4-1/, April
OpenAI. Introducing GPT-4.1 in the api.https://openai.com/index/gpt-4-1/, April
-
[26]
Accessed: 2025-09-12
work page 2025
-
[27]
GPT-5 system card.https://cdn.openai.com/gpt-5-system-card.pdf, Au- gust 2025
OpenAI. GPT-5 system card.https://cdn.openai.com/gpt-5-system-card.pdf, Au- gust 2025. Accessed: 2025-09-24
work page 2025
-
[28]
Teach: Task-driven embodied agents that chat
Aishwarya Padmakumar, Jesse Thomason, Ayush Shrivastava, Patrick Lange, Anjali Narayan- Chen, Spandana Gella, Robinson Piramuthu, Gokhan Tur, and Dilek Hakkani-Tur. Teach: Task-driven embodied agents that chat. InProceedings of the AAAI Conference on Artificial Intelligence, volume 36, pages 2017–2025, 2022
work page 2017
-
[29]
Ugo Pagallo. Robots in the cloud with privacy: A new threat to data protection?Computer Law & Security Review, 29(5):501–508, 2013
work page 2013
-
[30]
Virtualhome: Simulating household activities via programs
Xavier Puig, Kevin Ra, Marko Boben, Jiaman Li, Tingwu Wang, Sanja Fidler, and Antonio Torralba. Virtualhome: Simulating household activities via programs. InProceedings of the IEEE conference on computer vision and pattern recognition, pages 8494–8502, 2018
work page 2018
-
[31]
Guanqiao Qu, Qiyuan Chen, Wei Wei, Zheng Lin, Xianhao Chen, and Kaibin Huang. Mobile edge intelligence for large language models: A contemporary survey.IEEE Communications Surveys & Tutorials, 27(6):3820–3860, 2025
work page 2025
-
[32]
Qwen3.5: Towards native multimodal agents, February 2026
Qwen Team. Qwen3.5: Towards native multimodal agents, February 2026. URLhttps: //qwen.ai/blog?id=qwen3.5. 12
work page 2026
-
[33]
SayPlan: Grounding large language models using 3d scene graphs for scalable robot task planning,
Krishan Rana, Jesse Haviland, Sourav Garg, Jad Abou-Chakra, Ian Reid, and Niko Suender- hauf. Sayplan: Grounding large language models using 3d scene graphs for scalable robot task planning.arXiv preprint arXiv:2307.06135, 2023
-
[34]
Allen Z Ren, Anushri Dixit, Alexandra Bodrova, Sumeet Singh, Stephen Tu, Noah Brown, Peng Xu, Leila Takayama, Fei Xia, Jake Varley, et al. Robots that ask for help: Uncertainty alignment for large language model planners.arXiv preprint arXiv:2307.01928, 2023
-
[35]
igibson 1.0: A simulation environment for interactive tasks in large realistic scenes
Bokui Shen, Fei Xia, Chengshu Li, Roberto Martín-Martín, Linxi Fan, Guanzhi Wang, Clau- dia Pérez-D’Arpino, Shyamal Buch, Sanjana Srivastava, Lyne Tchapmi, et al. igibson 1.0: A simulation environment for interactive tasks in large realistic scenes. In2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 7520–7527. IEEE, 2021
work page 2021
-
[36]
Alfred: A benchmark for interpreting grounded instructions for everyday tasks
Mohit Shridhar, Jesse Thomason, Daniel Gordon, Yonatan Bisk, Winson Han, Roozbeh Mot- taghi, Luke Zettlemoyer, and Dieter Fox. Alfred: A benchmark for interpreting grounded instructions for everyday tasks. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 10740–10749, 2020
work page 2020
-
[37]
ALFWorld: Aligning Text and Embodied Environments for Interactive Learning
Mohit Shridhar, Xingdi Yuan, Marc-Alexandre Côté, Yonatan Bisk, Adam Trischler, and Matthew Hausknecht. Alfworld: Aligning text and embodied environments for interactive learning.arXiv preprint arXiv:2010.03768, 2020
work page internal anchor Pith review Pith/arXiv arXiv 2010
-
[38]
ProgPrompt: Generating Situated Robot Task Plans using Large Language Models
Ishika Singh, Valts Blukis, Arsalan Mousavian, Ankit Goyal, Danfei Xu, Jonathan Tremblay, Dieter Fox, Jesse Thomason, and Animesh Garg. Progprompt: Generating situated robot task plans using large language models.arXiv preprint arXiv:2209.11302, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[39]
Llm-planner: Few-shot grounded planning for embodied agents with large language models
Chan Hee Song, Jiaman Wu, Clayton Washington, Brian M Sadler, Wei-Lun Chao, and Yu Su. Llm-planner: Few-shot grounded planning for embodied agents with large language models. In Proceedings of the IEEE/CVF international conference on computer vision, pages 2998–3009, 2023
work page 2023
-
[40]
Sanjana Srivastava, Chengshu Li, Michael Lingelbach, Roberto Martín-Martín, Fei Xia, Kent Elliott Vainio, Zheng Lian, Cem Gokmen, Shyamal Buch, Karen Liu, et al. Behavior: Benchmark for everyday household activities in virtual, interactive, and ecological environ- ments. InConference on robot learning, pages 477–490. PMLR, 2022
work page 2022
-
[41]
PersonalHomeBench: Evaluating Agents in Personalized Smart Homes
Nikhil Verma, InJung Yang, Sungil Kim, KoKeun Kim, YoungJoon Kim, Manasa Bharadwaj, Yolanda Liu, and Kevin Ferreira. Personalhomebench: Evaluating agents in personalized smart homes.arXiv preprint arXiv:2604.16813, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[42]
Rui Wang, Zhiyong Gao, Liuyang Zhang, Shuaibing Yue, and Ziyi Gao. Empowering large language models to edge intelligence: A survey of edge efficient llms and techniques.Com- puter Science Review, 57:100755, 2025
work page 2025
-
[43]
Llm^ 3: Large language model-based task and motion planning with motion failure reasoning
Shu Wang, Muzhi Han, Ziyuan Jiao, Zeyu Zhang, Ying Nian Wu, Song-Chun Zhu, and Hangxin Liu. Llm^ 3: Large language model-based task and motion planning with motion failure reasoning. In2024 IEEE/RSJ international conference on intelligent robots and sys- tems (IROS), pages 12086–12092. IEEE, 2024
work page 2024
-
[44]
Privacy communication patterns for domestic robots
Maximiliane Windl, Jan Leusmann, Albrecht Schmidt, Sebastian S Feger, and Sven Mayer. Privacy communication patterns for domestic robots. InTwentieth Symposium on Usable Pri- vacy and Security (SOUPS 2024), pages 121–138, 2024
work page 2024
-
[45]
Jimmy Wu, Rika Antonova, Adam Kan, Marion Lepert, Andy Zeng, Shuran Song, Jeannette Bohg, Szymon Rusinkiewicz, and Thomas Funkhouser. Tidybot: Personalized robot assistance with large language models.Autonomous Robots, 47:1087–1102, 2023
work page 2023
-
[46]
Yike Wu, Jiatao Zhang, Nan Hu, Lanling Tang, Guilin Qi, Jun Shao, Jie Ren, and Wei Song. Mldt: Multi-level decomposition for complex long-horizon robotic task planning with open- source large language model. InInternational Conference on Database Systems for Advanced Applications, pages 251–267. Springer, 2024. 13
work page 2024
-
[47]
Embodied task planning with large language models
Zhenyu Wu, Ziwei Wang, Xiuwei Xu, Jiwen Lu, and Haibin Yan. Embodied task planning with large language models.arXiv preprint arXiv:2307.01848, 2023
-
[48]
MiMo-V2-Flash Technical Report
Bangjun Xiao, Bingquan Xia, Bo Yang, Bofei Gao, Bowen Shen, Chen Zhang, Chenhong He, Chiheng Lou, Fuli Luo, Gang Wang, et al. Mimo-v2-flash technical report.arXiv preprint arXiv:2601.02780, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[49]
Haoming Ye, Yunxiao Xiao, Cewu Lu, and Panpan Cai. Uniplan: Vision-language task plan- ning for mobile manipulation with unified pddl formulation.arXiv preprint arXiv:2602.08537, 2026
-
[50]
Yue Zheng, Yuhao Chen, Bin Qian, Xiufang Shi, Yuanchao Shu, and Jiming Chen. A review on edge large language models: Design, execution, and applications.ACM Computing Surveys, 57(8):1–35, 2025. 14 A Appendix Table of Contents Benchmark and Method Details Appendix B: Benchmark Details. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ....
work page 2025
-
[51]
Node goals: an object should reach a specific state
-
[52]
Edge goals: an object should be moved to a specific location or container. Possible target states for node goals: ON, OFF, OPEN, CLOSED, CLEAN, PLUGGED_IN, PLUGGED_OUT Possible relations for edge goals: ON, INSIDE Rules:
-
[53]
Only include changes from the current state
-
[54]
Use exact object IDs from the grounded scene graph
-
[55]
Include all goals implied by the request and the household context
-
[56]
Do not invent objects that are not present in the grounded scene graph
-
[57]
If ordering is important, list goals in the order they should be achieved. REQUEST: {request} NODES: {nodes} EDGES: {edges} Output only a JSON object with the following format: {“node_goals”: [...], “edge_goals”: [...]} D.3 Ordering Hint for Goal Sequences For the goal-sequence variant used by TaskGround, the following ordering hint is appended to the tas...
-
[58]
[WALK] dining_area ’dining_area_id’ <-- hallucinated ID
-
[59]
[FIND] bread ’bread_id’
-
[60]
[GRAB] bread ’bread_id’
-
[61]
[WALK] office_couch ’office_couch_id’ ... sim_error: invalid literal for int(): ’dining_area_id’ The complete-scene context contains hundreds of valid IDs; rather than paying the resolution cost of selecting the right one, the model falls back to placeholder symbols that the simulator cannot dispatch. •GPT-4.1: SIM_FAIL. The model violates the proximity p...
-
[62]
[WALK] dining_room 201
-
[63]
[GRAB] food_bread 3000 <-- character not close to bread
-
[64]
[WALK] home_office 319
-
[65]
[PUTBACK] food_bread 3000 couch 352
-
[66]
[SWITCHOFF] television 410 sim_error: <character>(65) is not close to <food_bread>(3000) The bread is inside the freezer, but the model attempts to grab it after walking only to the room- level node and omits the requiredOPEN. •GPT-5: PASS. The model correctly opens the freezer first and produces a valid action sequence. Result.The naive Full Scene + Act ...
-
[67]
[WALK] ceilinglamp 96
-
[68]
GPT-5 avoids the non-switchable lamp and passes
[SWITCHOFF] ceilinglamp 96 <-- no HAS_SWITCH affordance sim_error: <ceilinglamp>(96) does not have a switch Although the full scene graph encodes object affordances, the direct-action baseline fails to filter candidates by the required property when many visually or semantically similar objects coexist. GPT-5 avoids the non-switchable lamp and passes. Res...
work page 2009
-
[69]
[WALK] kitchen_counter 230
-
[70]
[WIPE] kitchen_counter 230
-
[71]
wipes sink and table <-- never washes cup.2009 •GPT-4.1: GOAL_FAIL. The model produces a short action sequence that cleans surfaces but skips the cup. •GPT-5: PASS. The model retrievescup.2009, washes it at the faucet, and wipes both surfaces. The phrase“sip some water”implies that a clean cup is needed, even though the cup is not explicitly named. The di...
work page 2009
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.